Download as PDF, PPTX




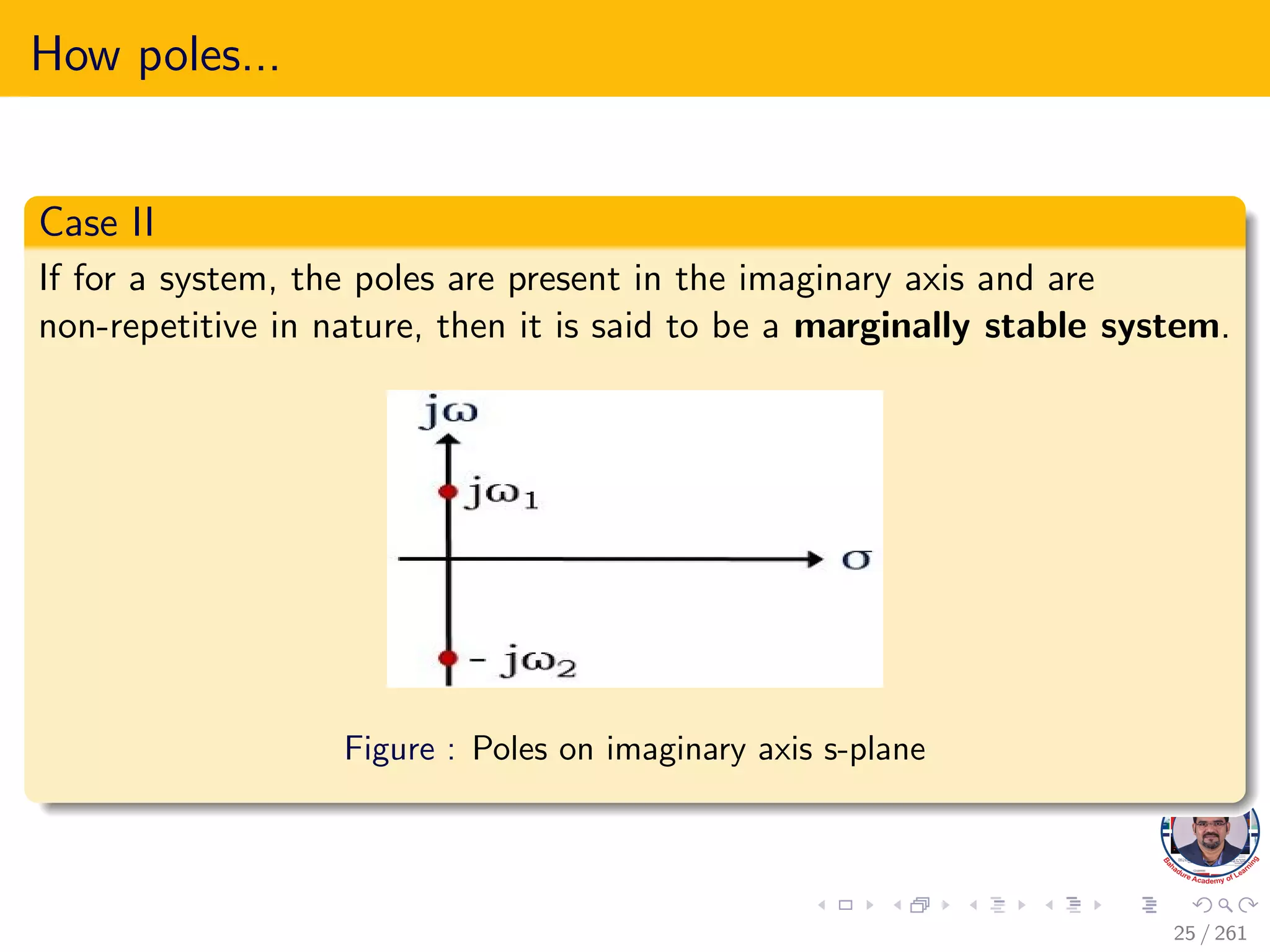


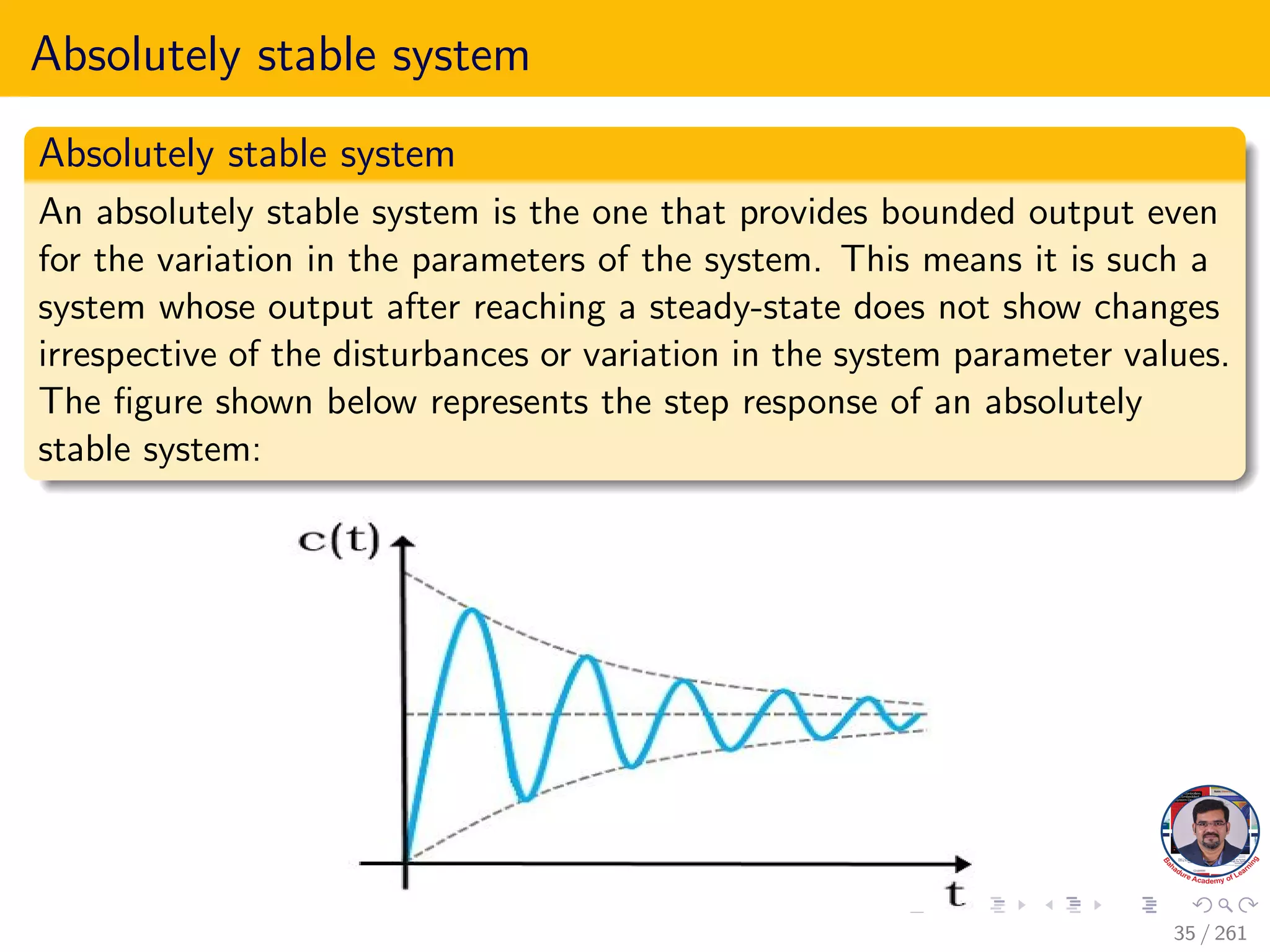


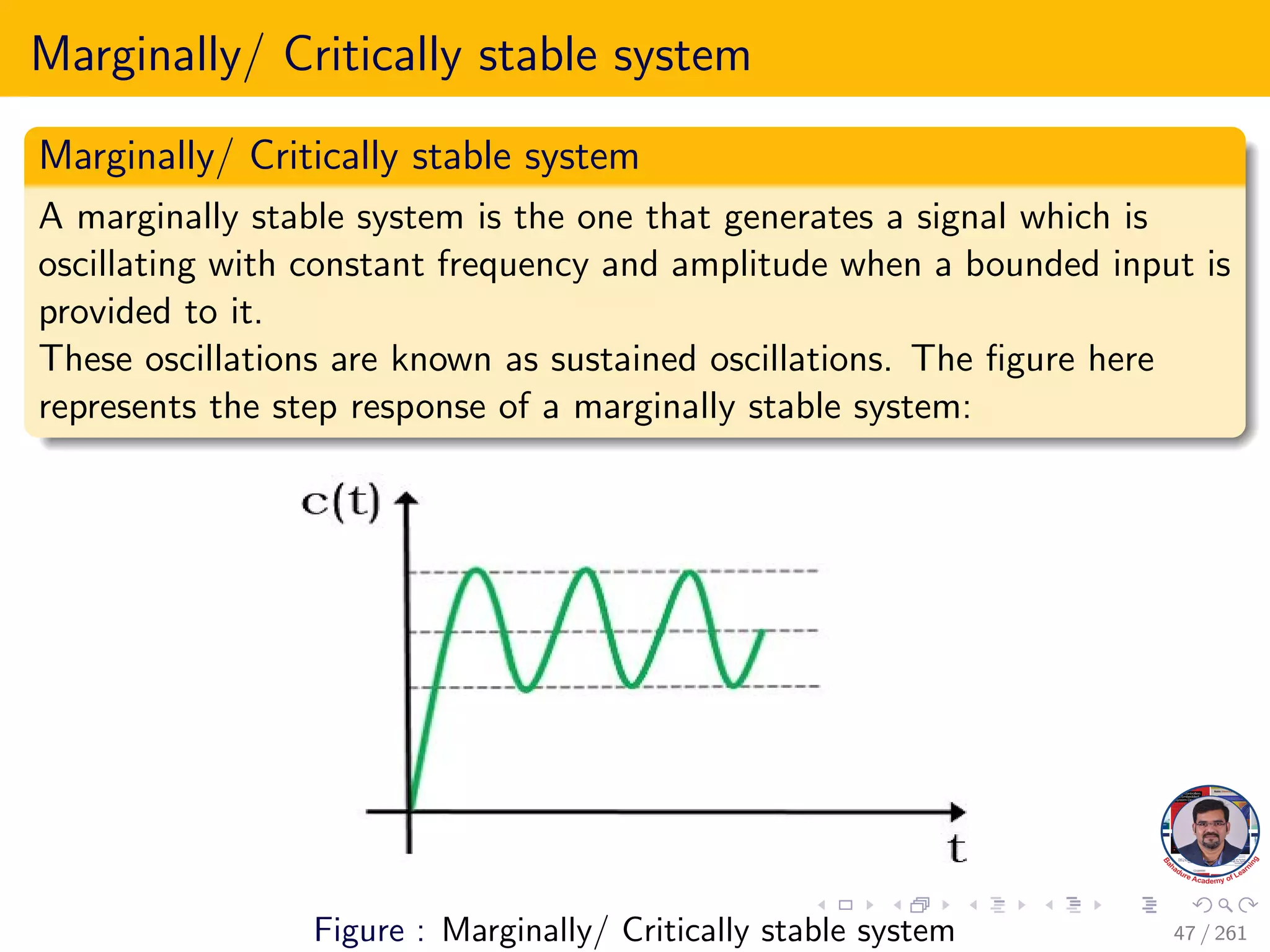
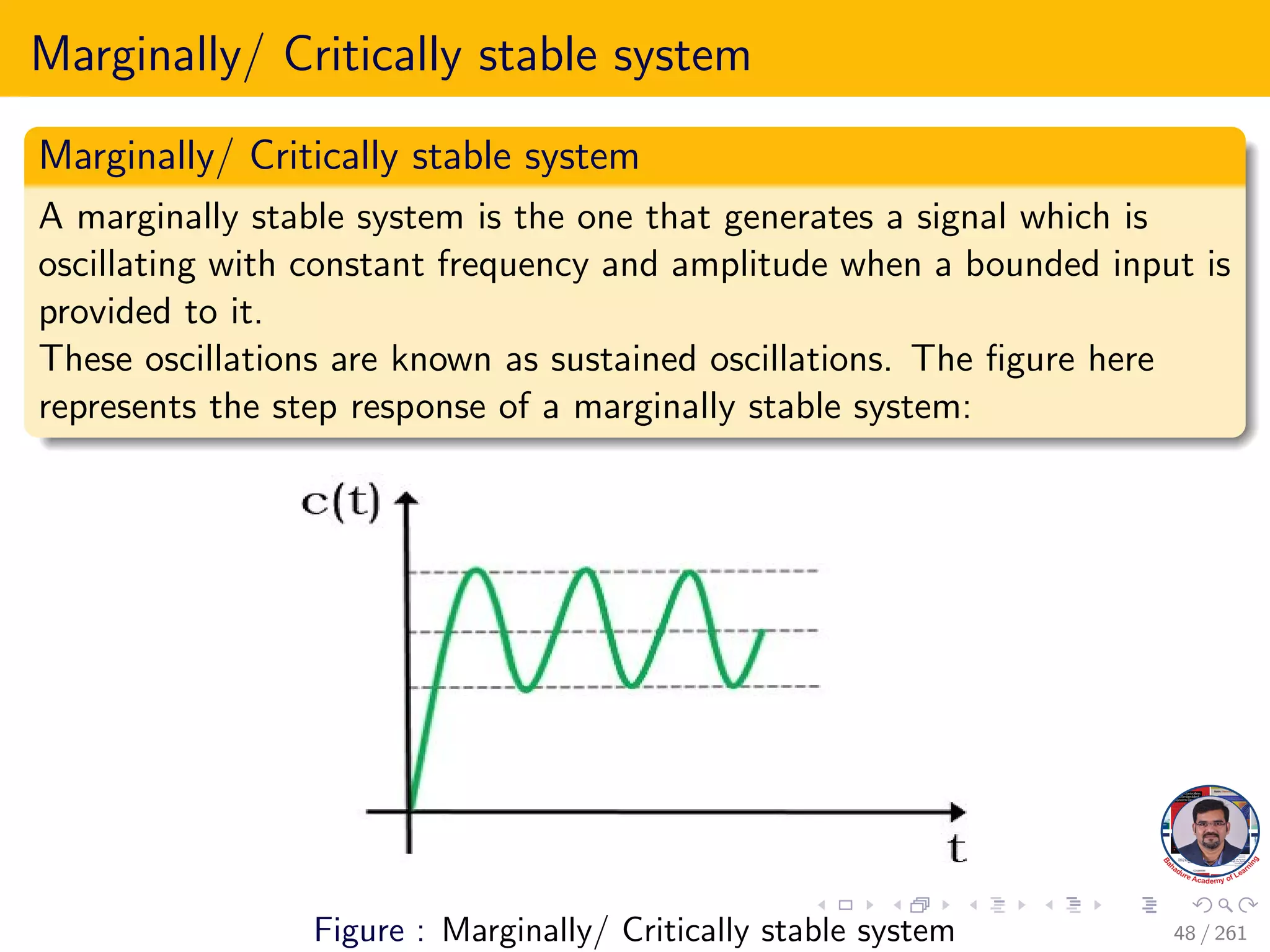
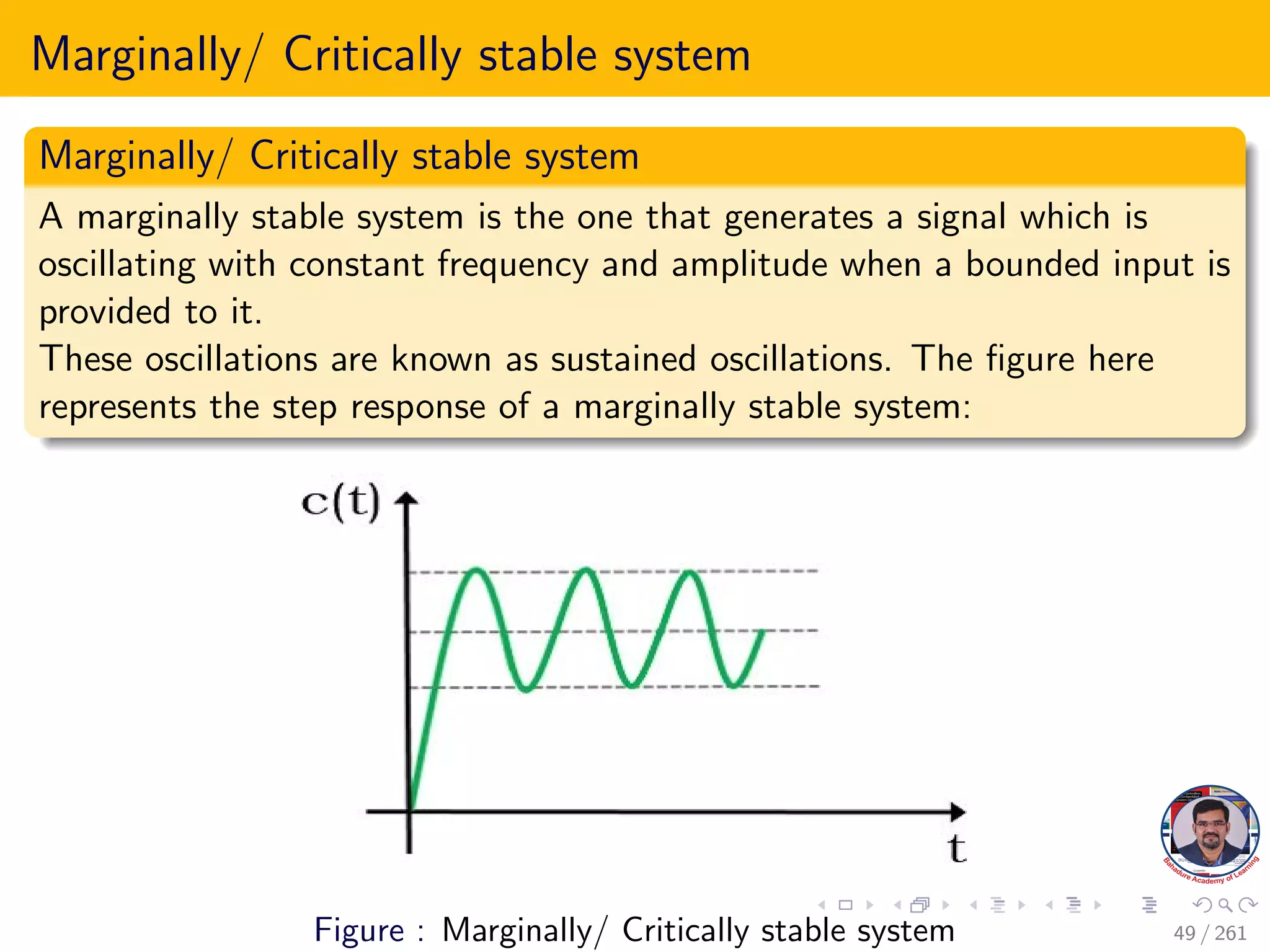



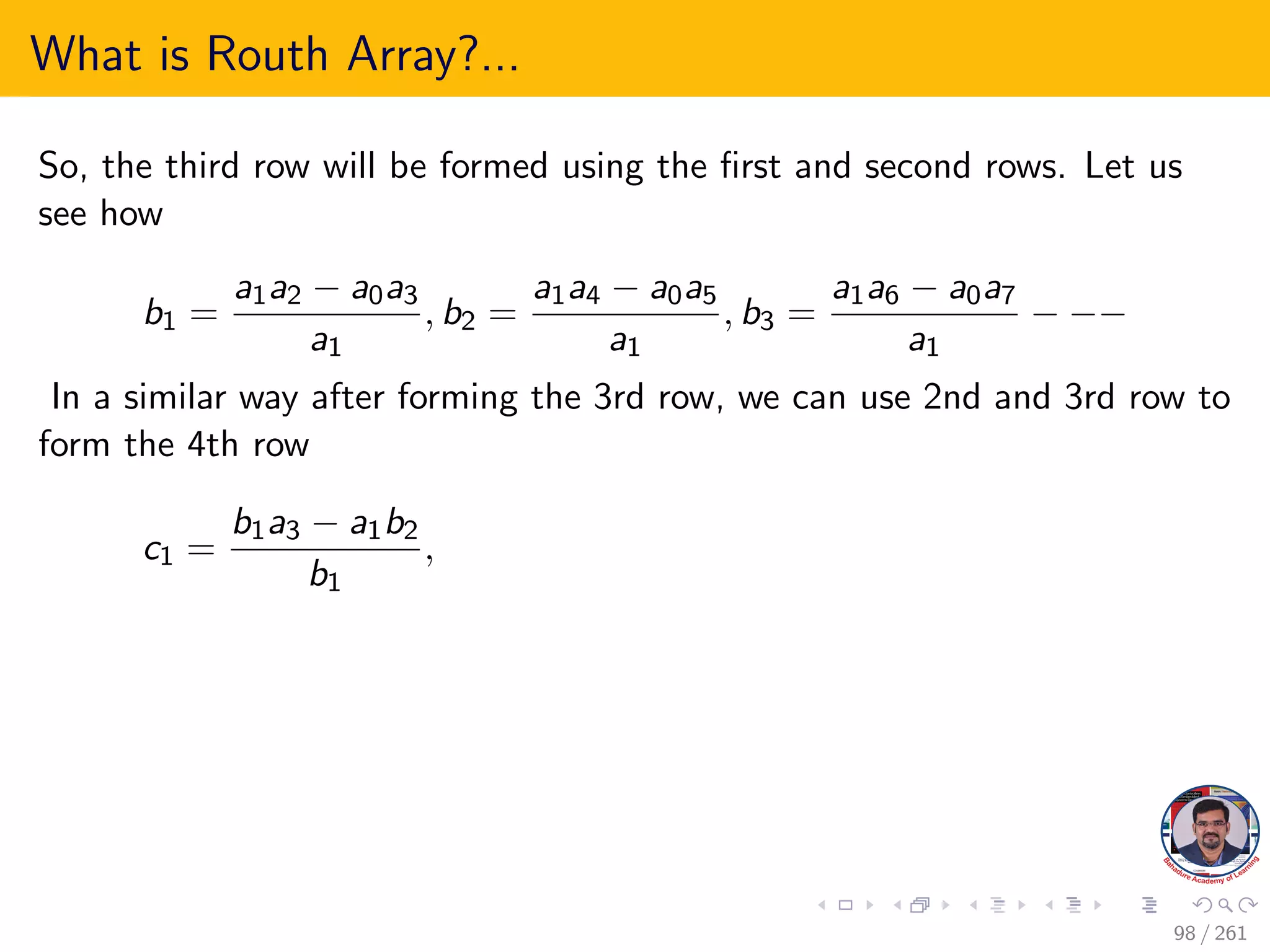
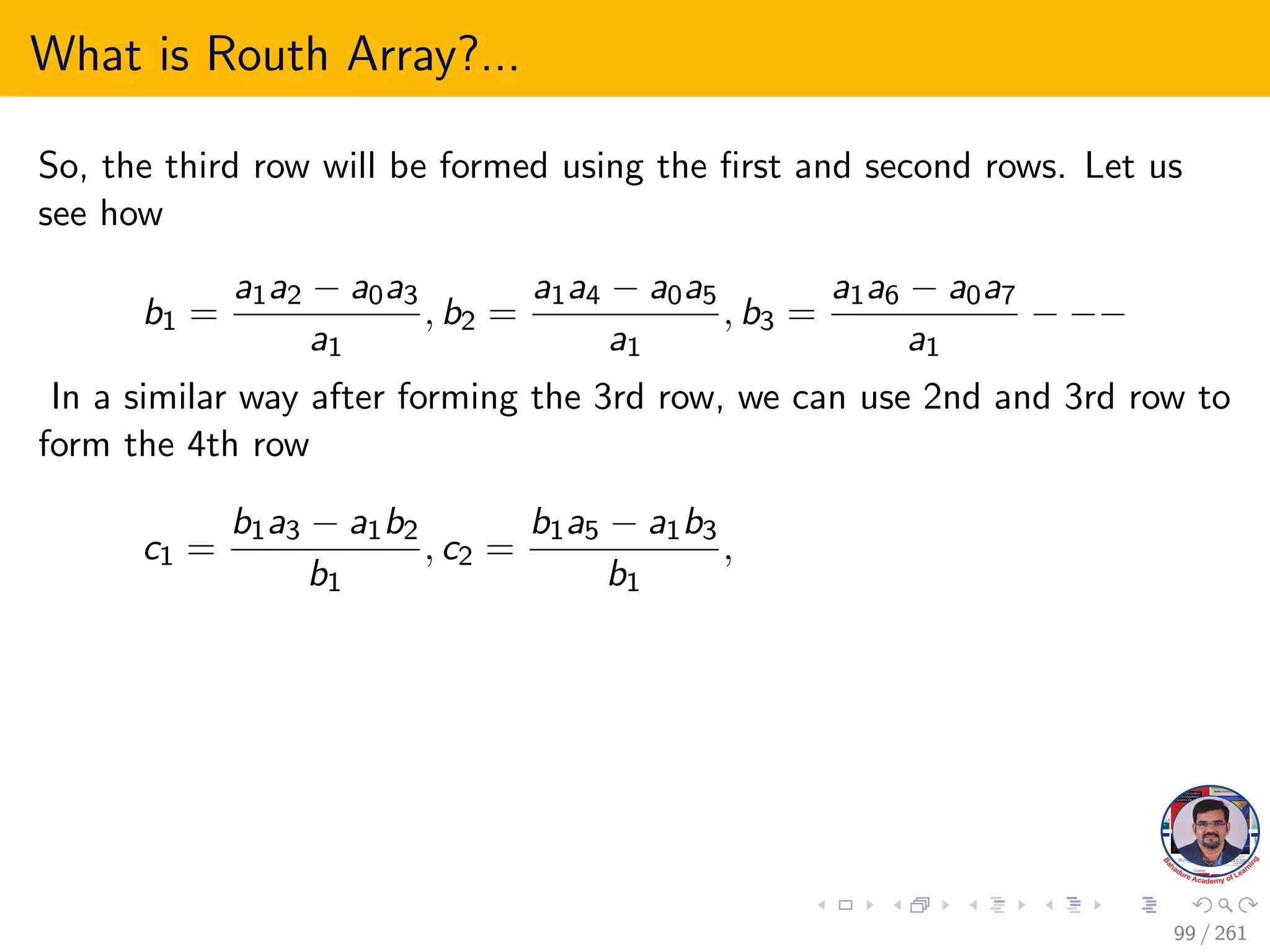
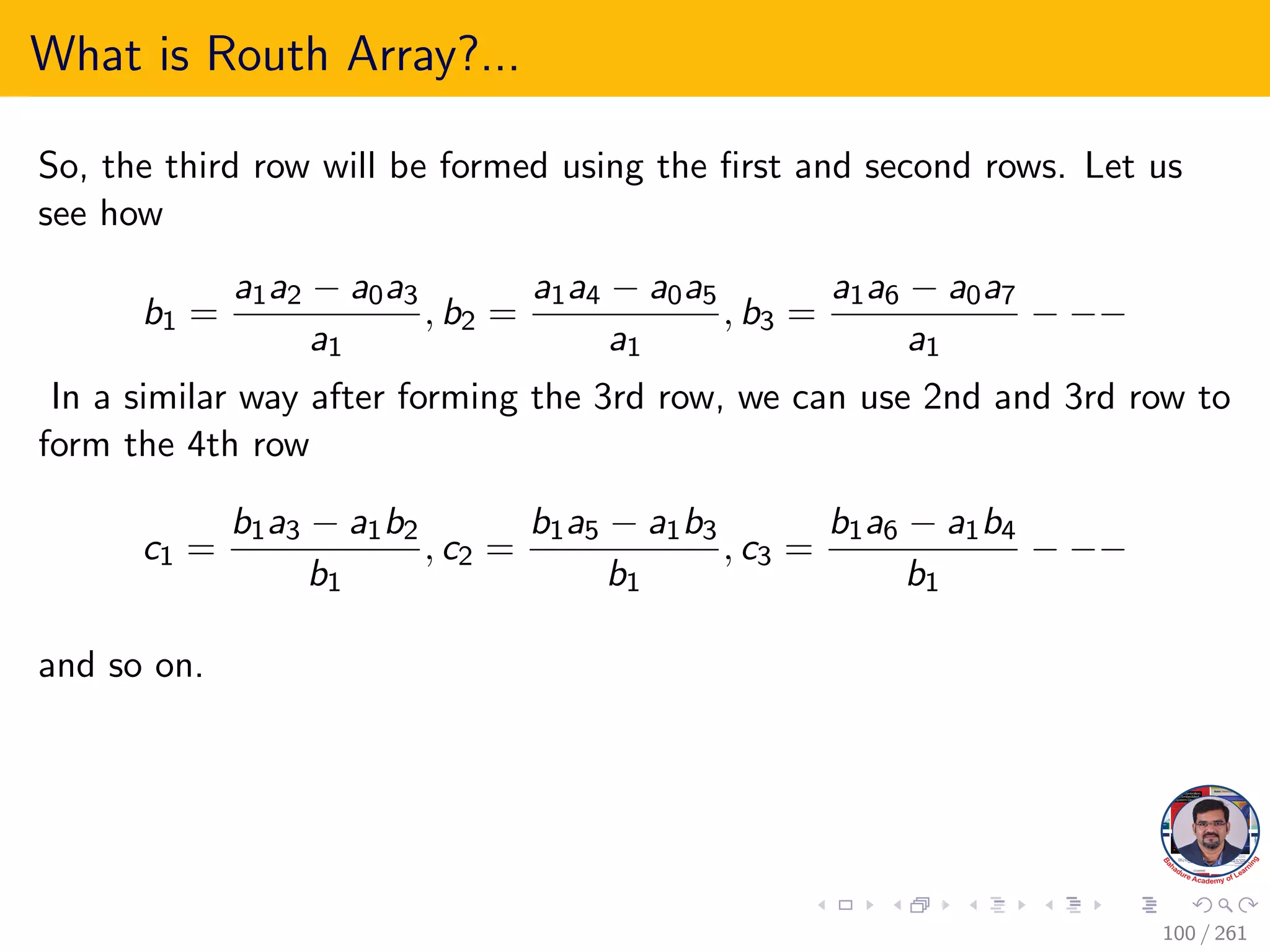
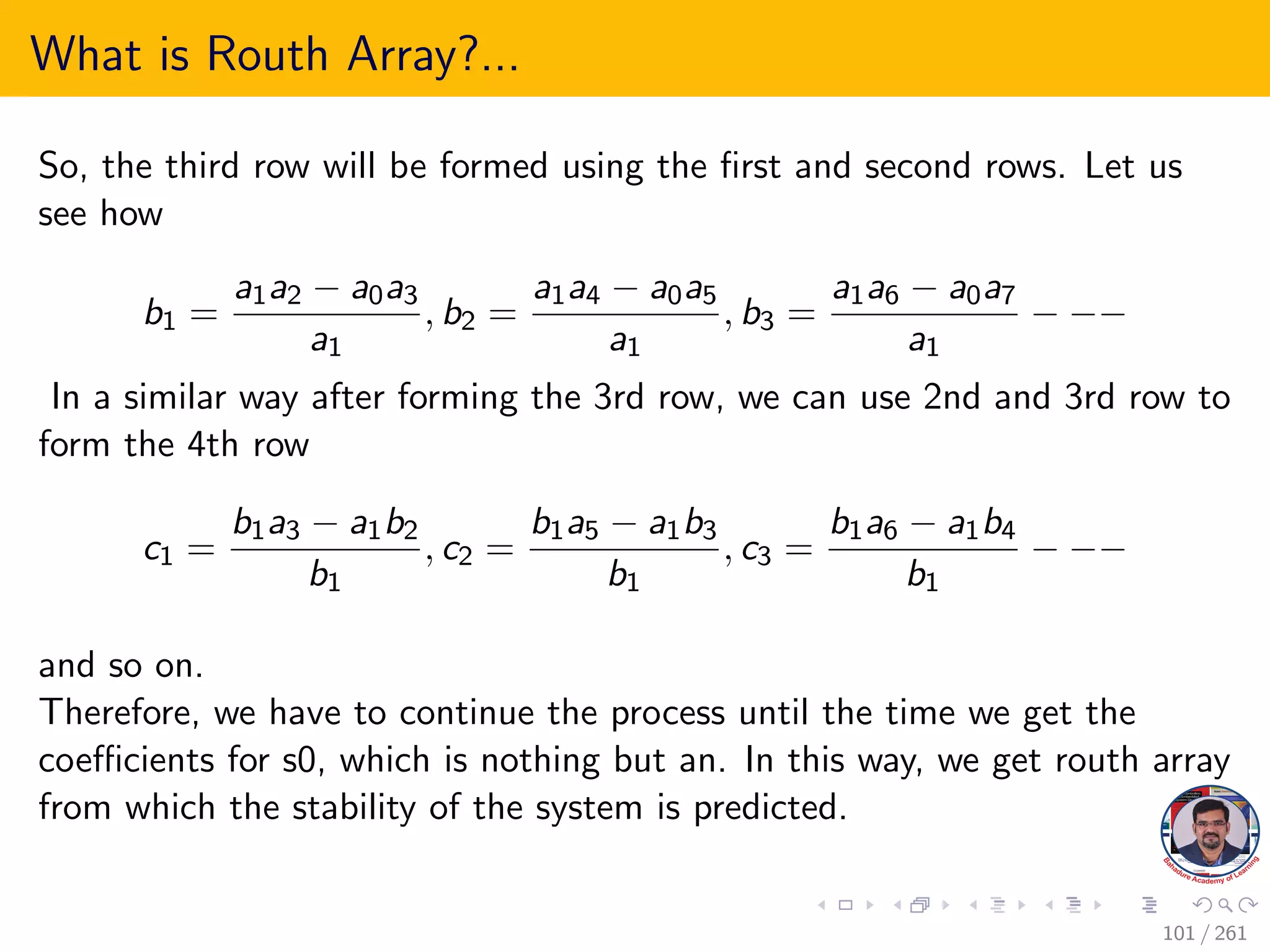
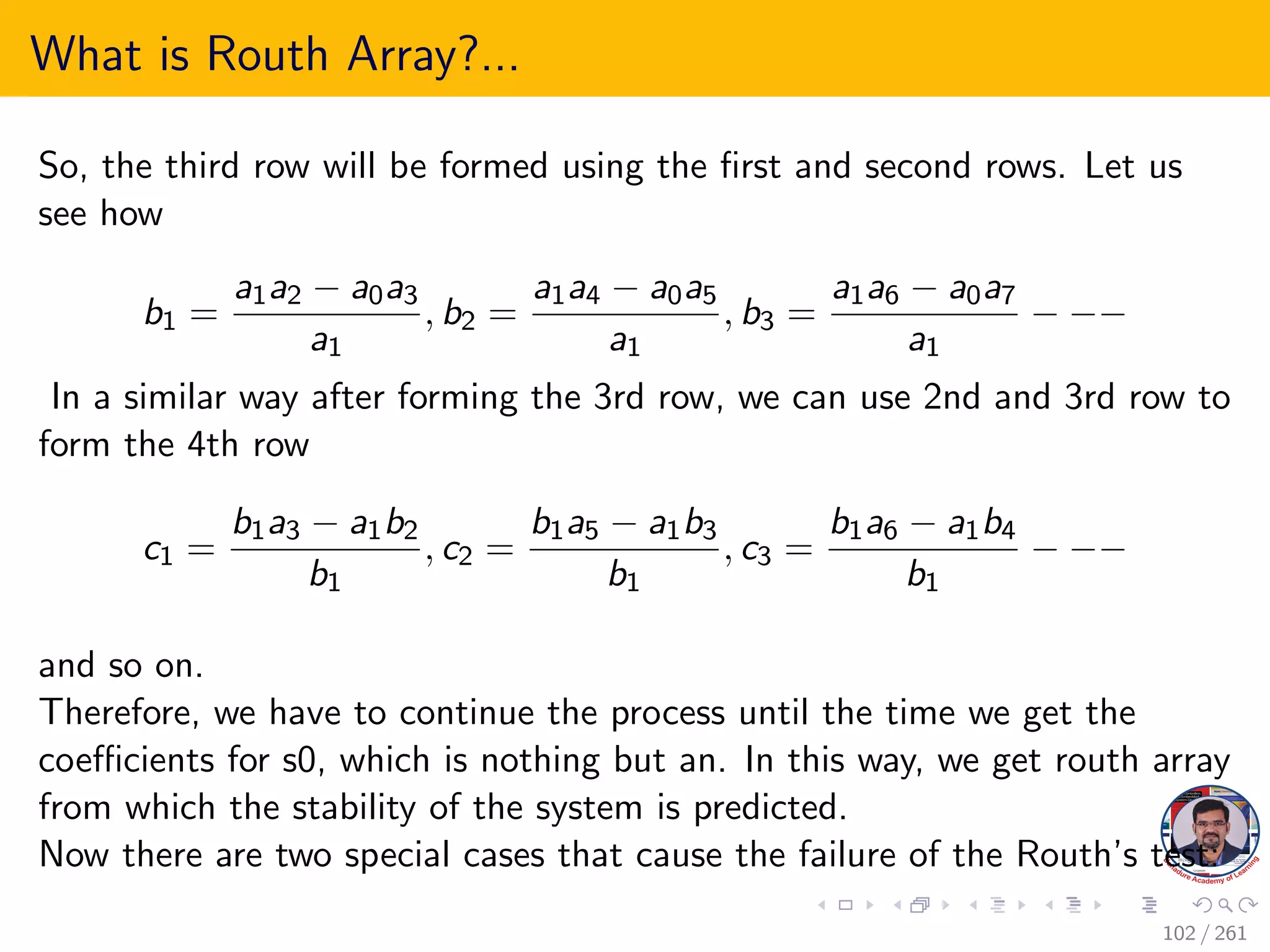
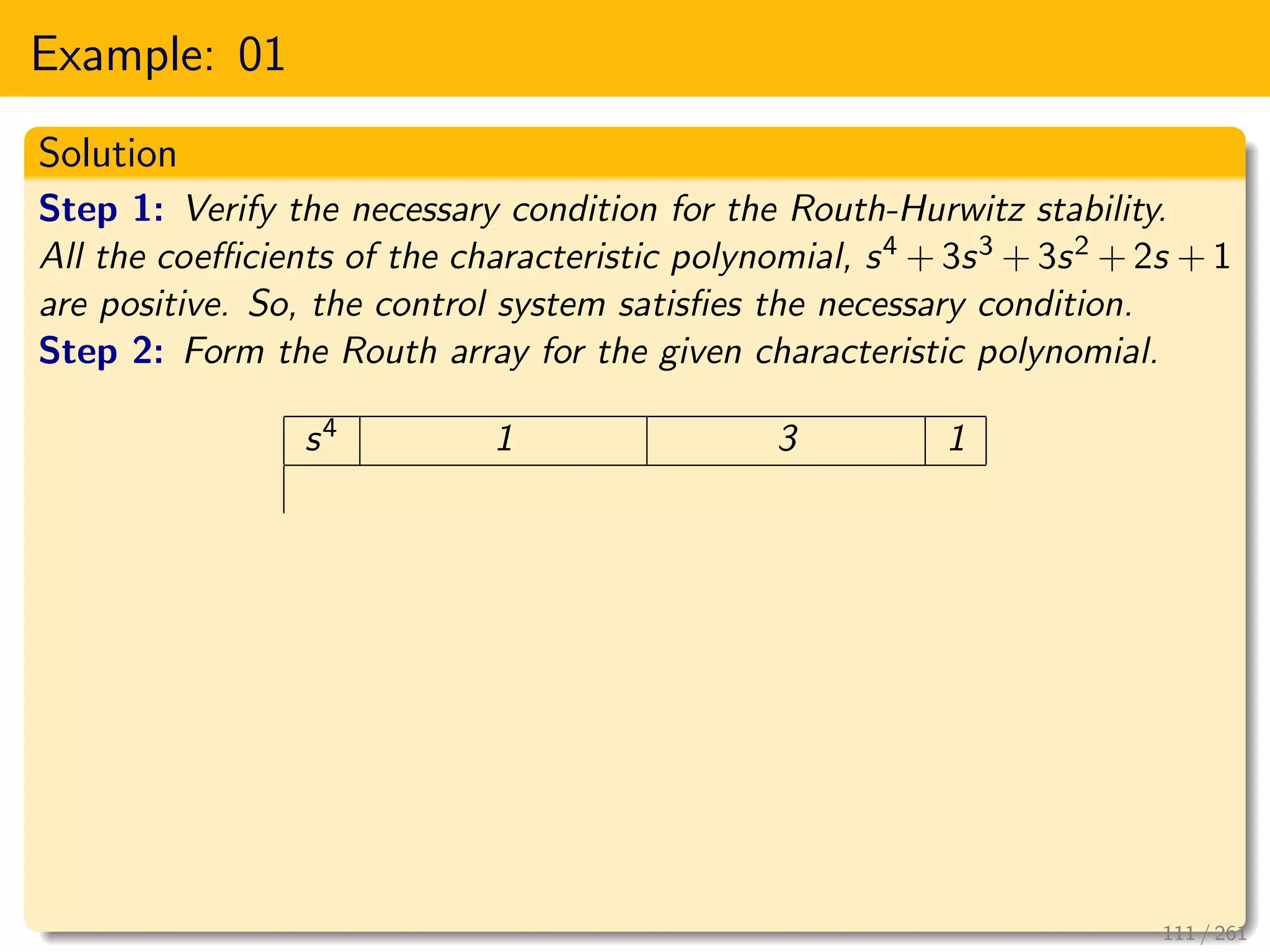
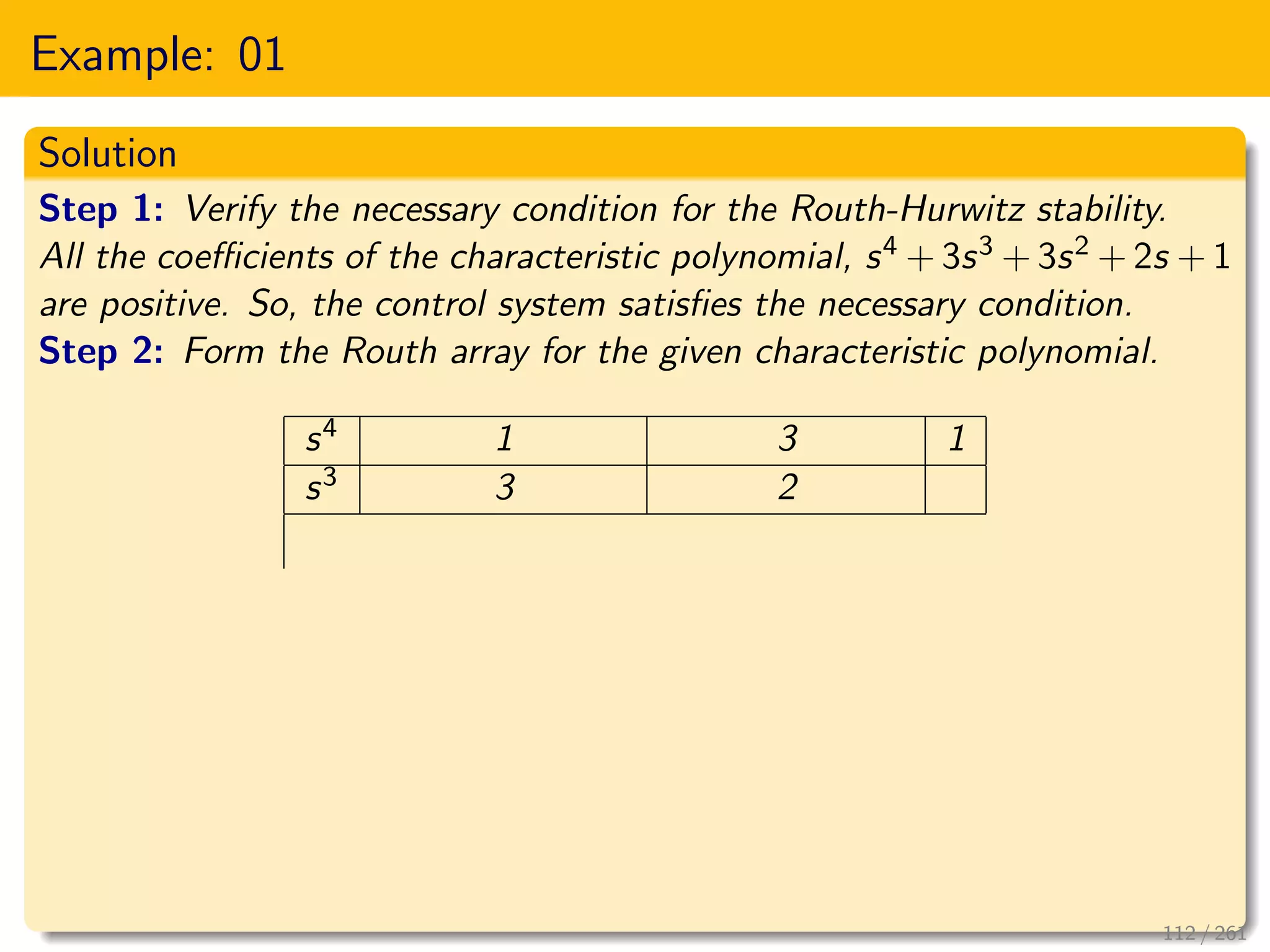
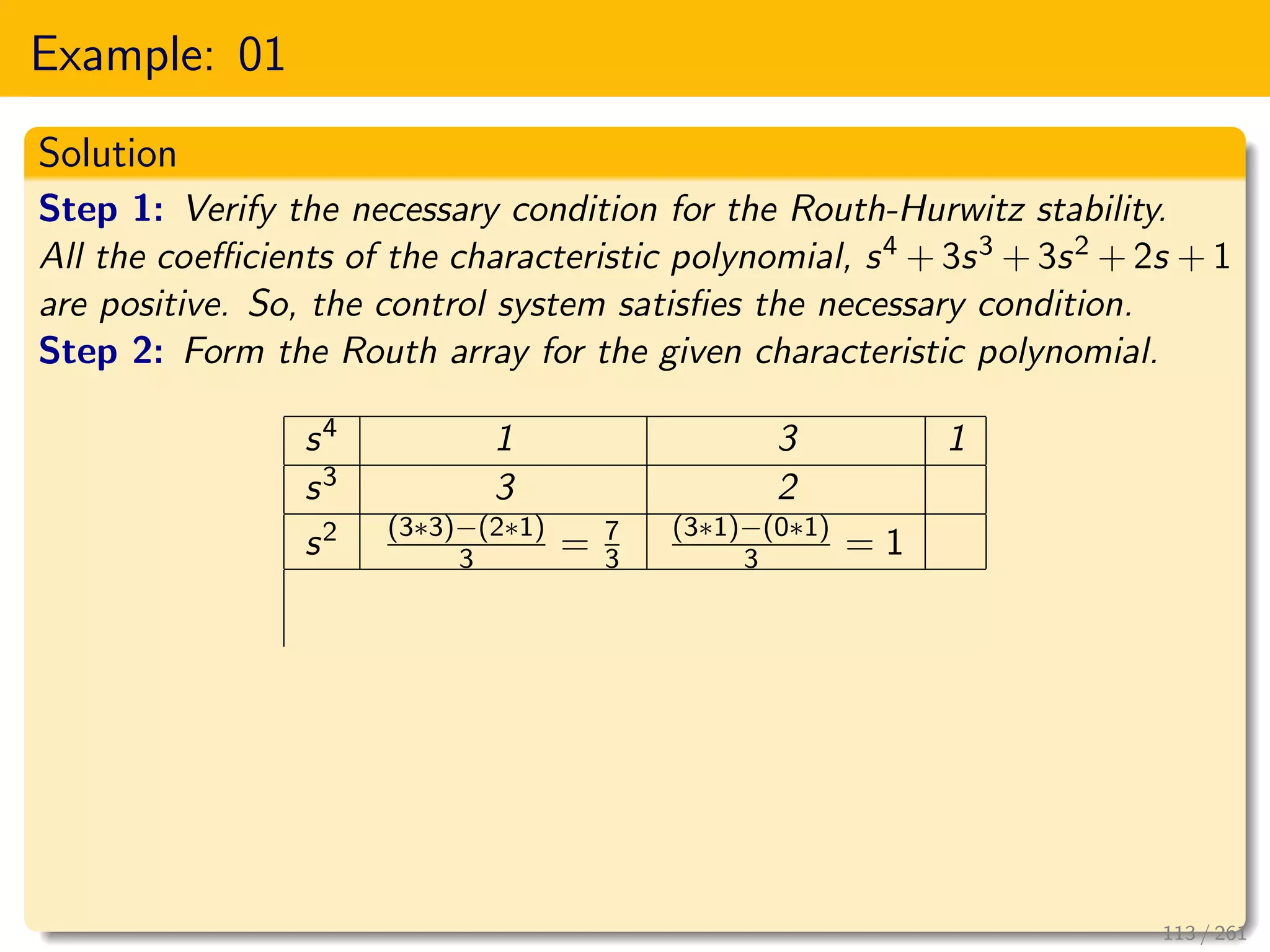
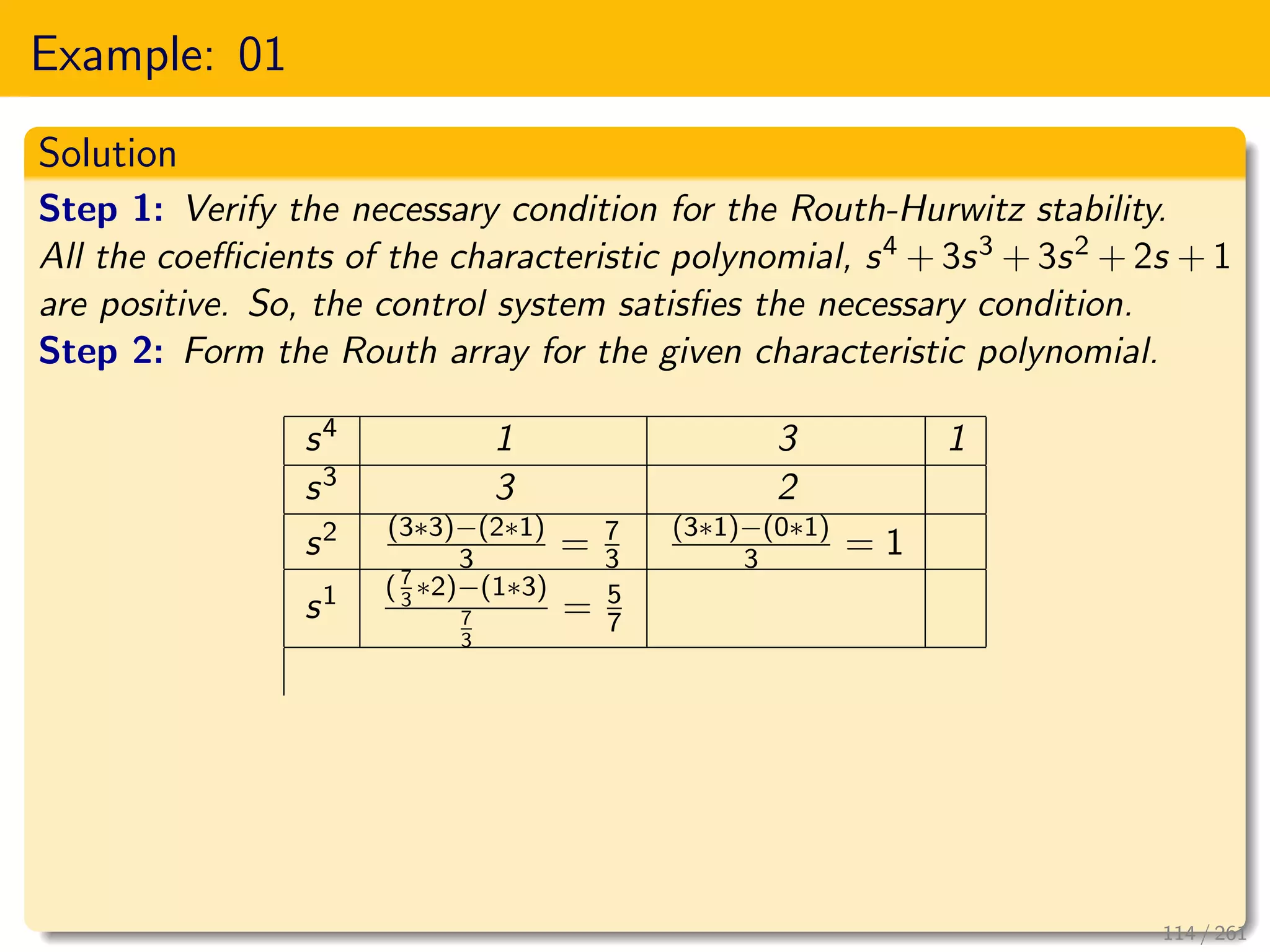
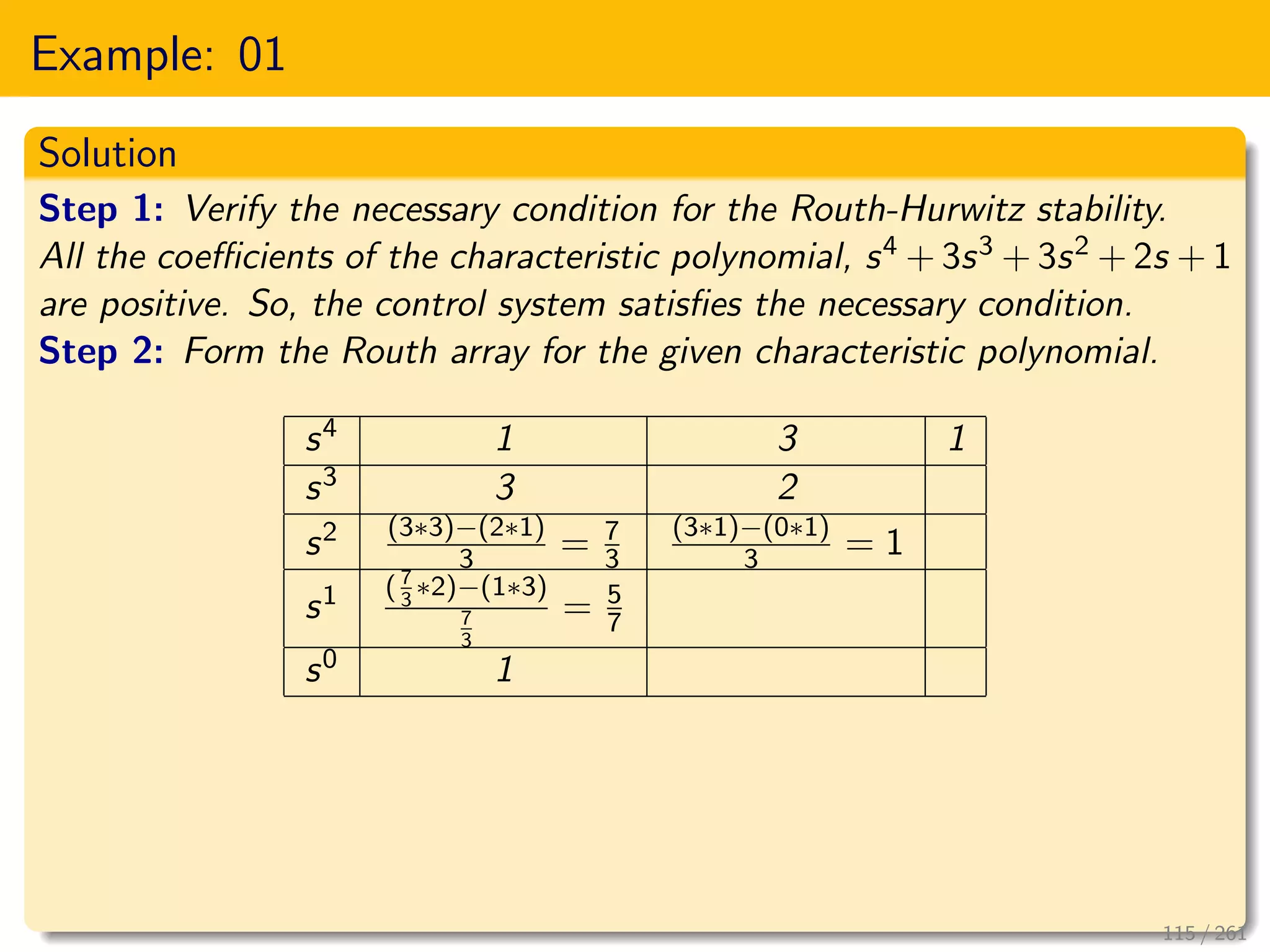
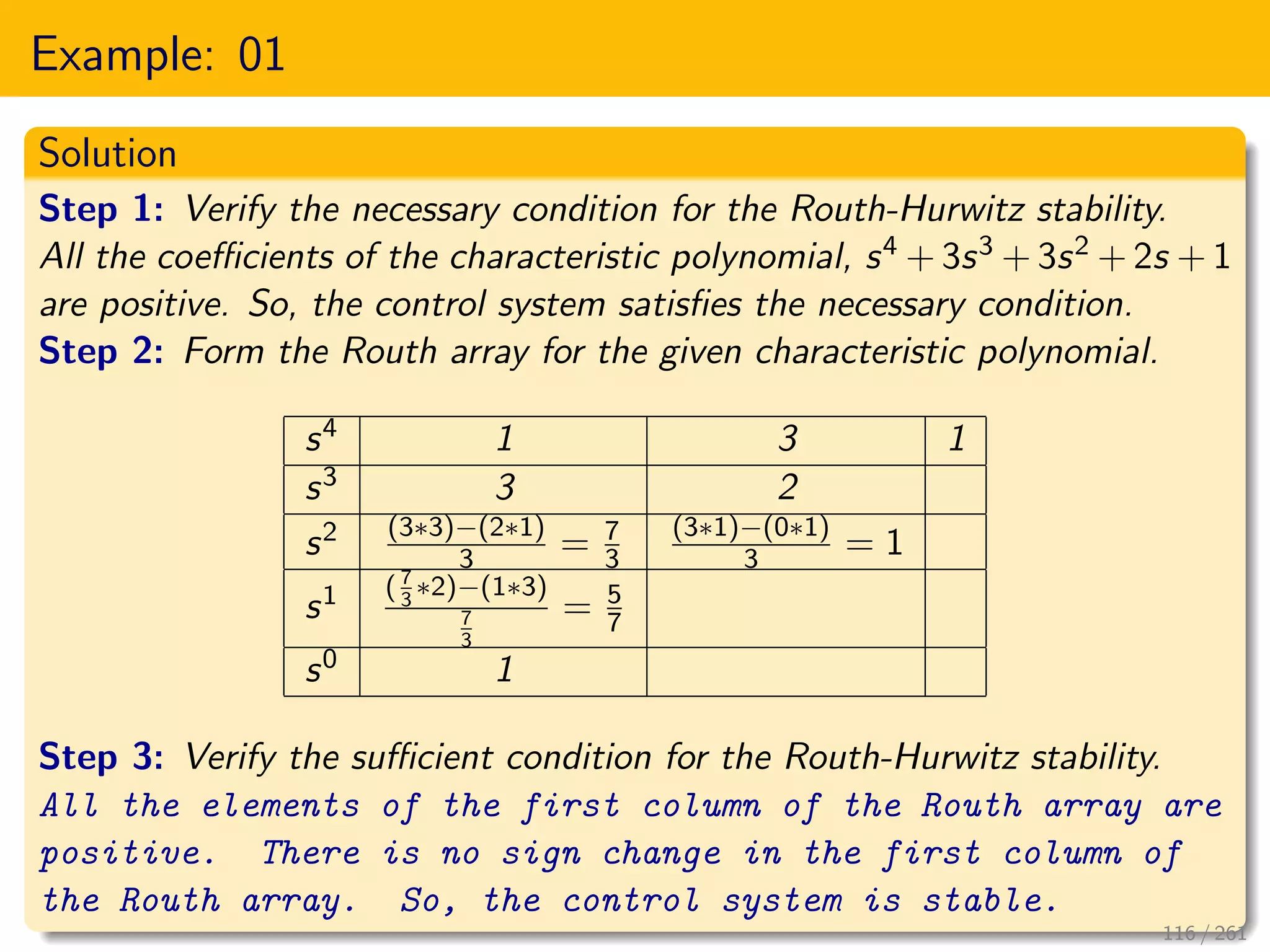
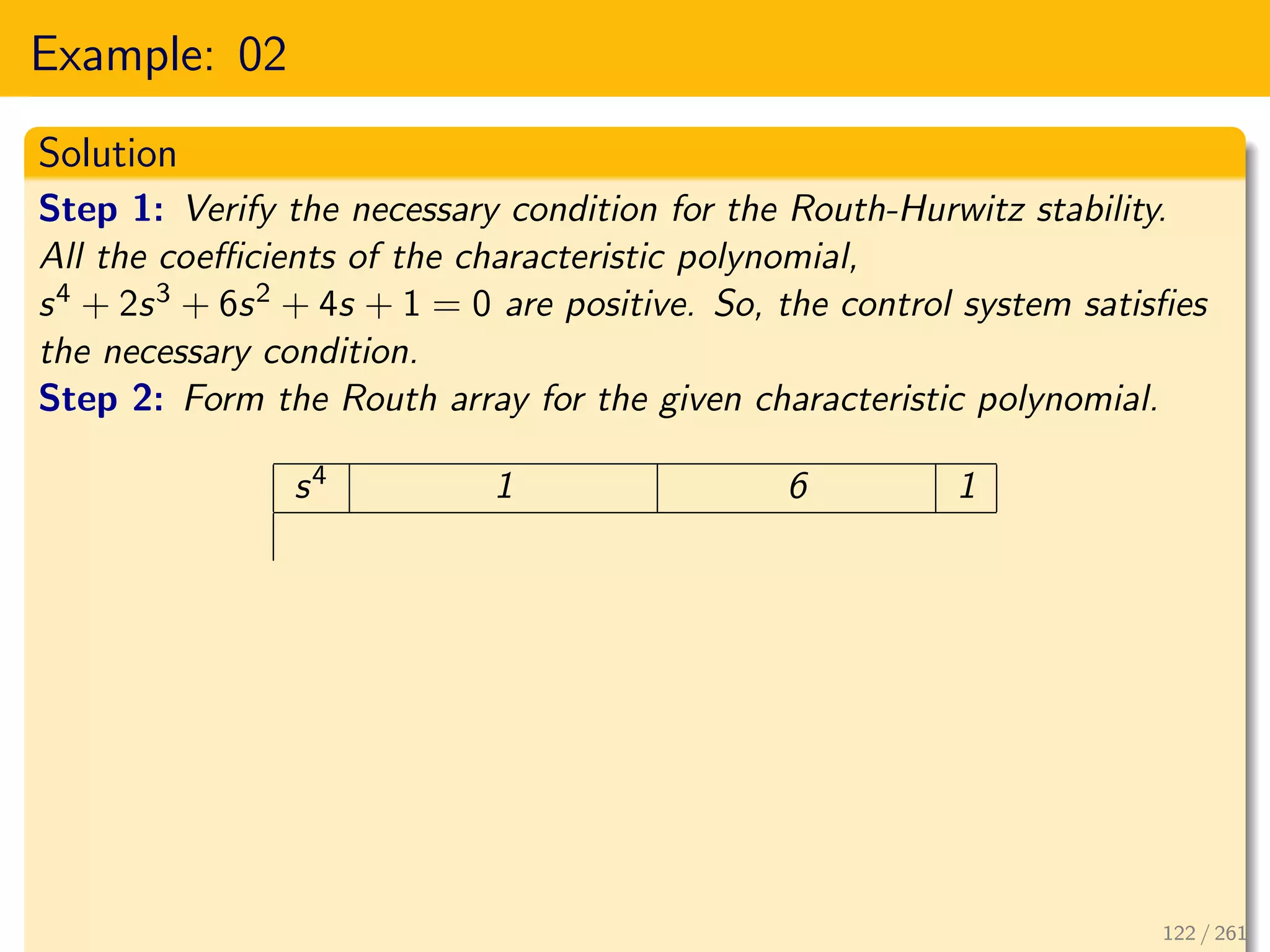
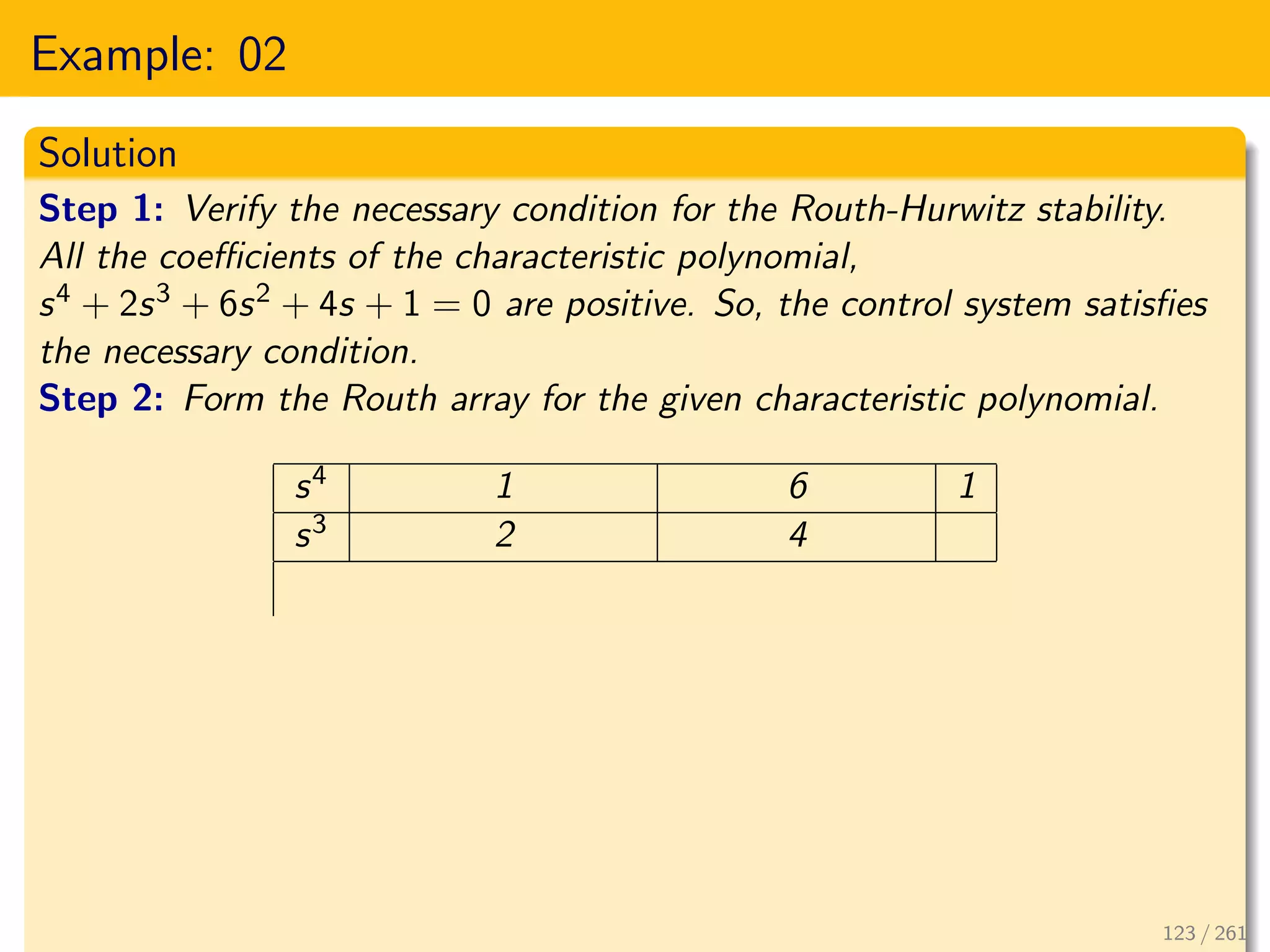
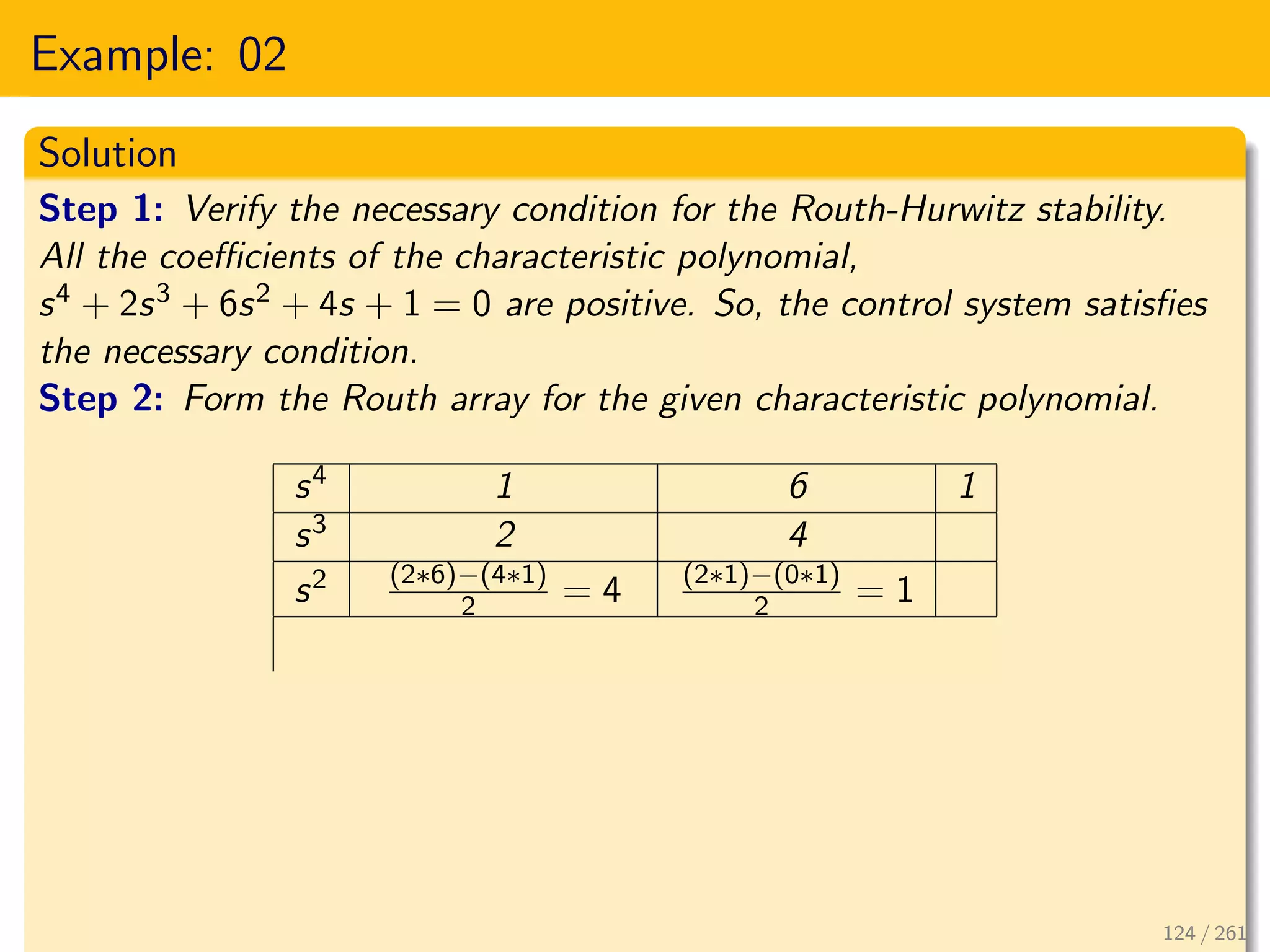
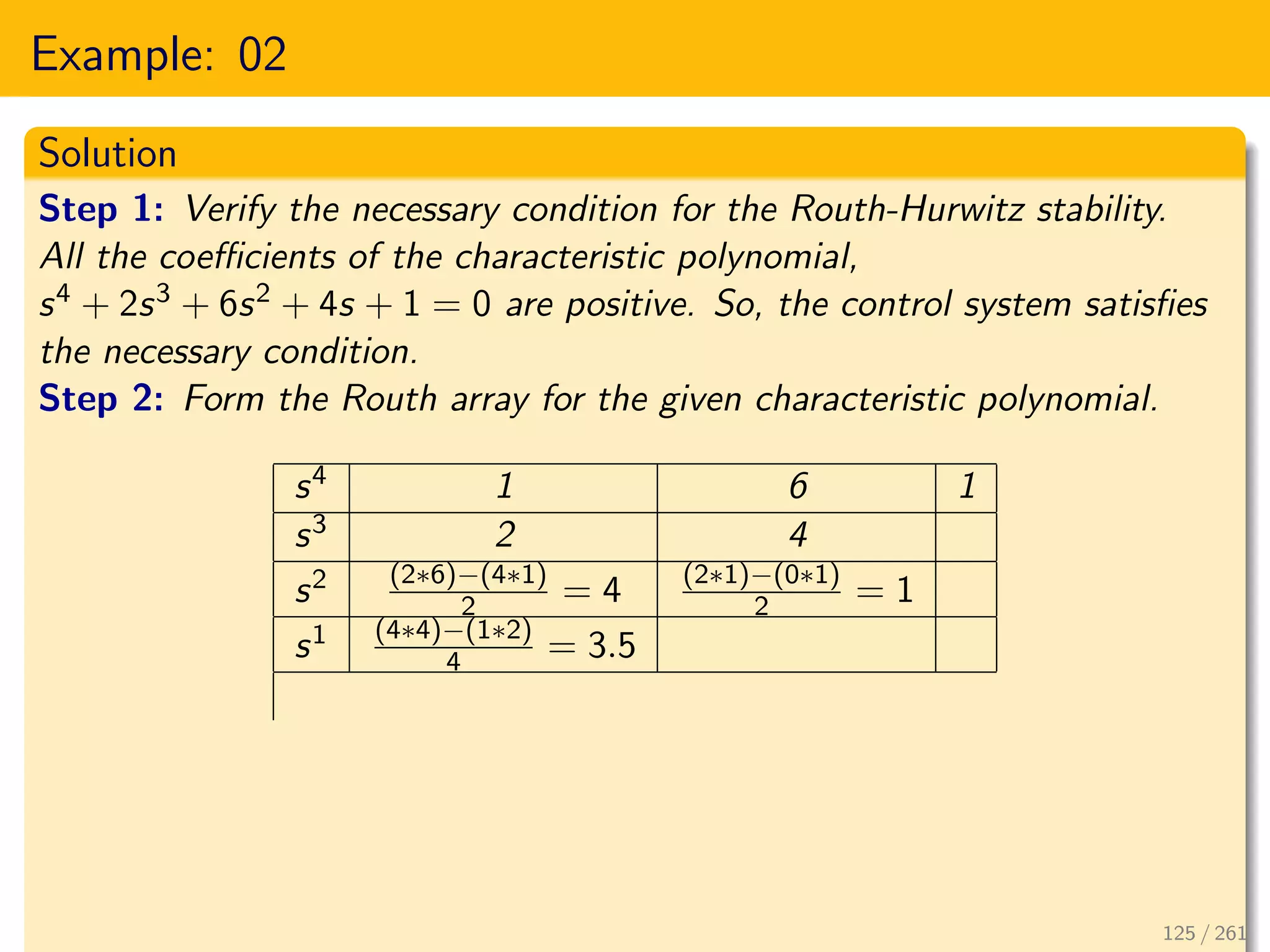
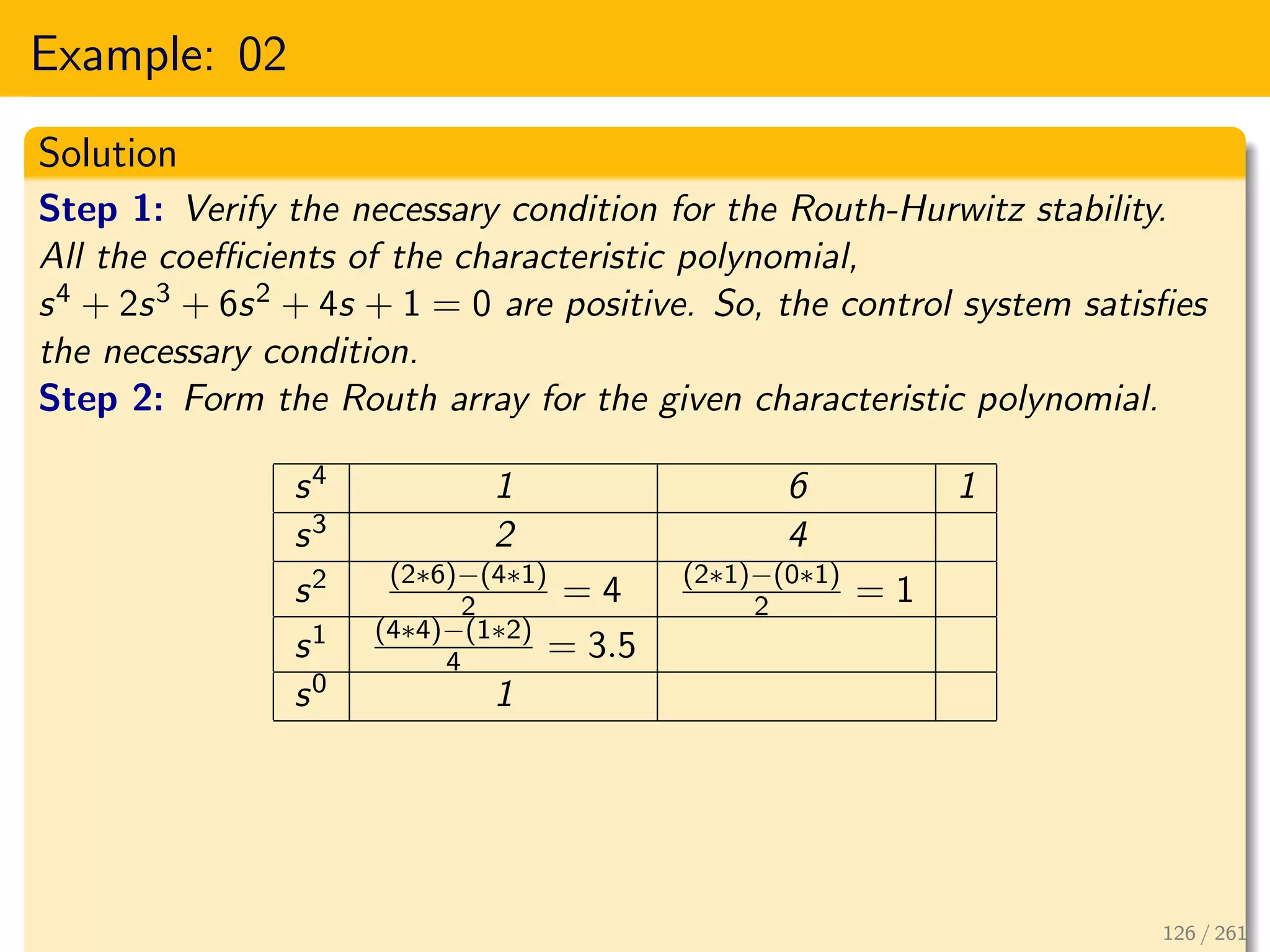
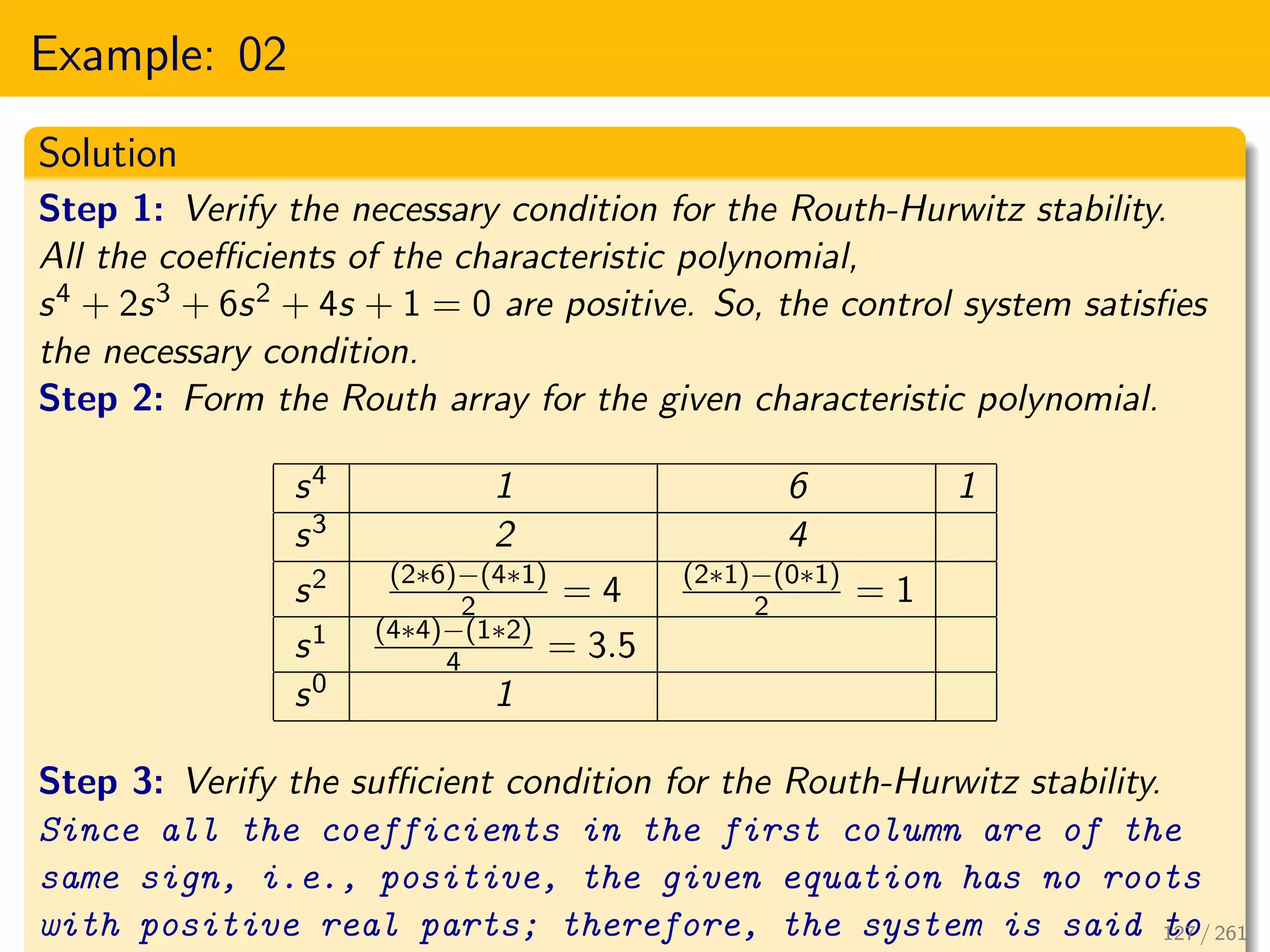
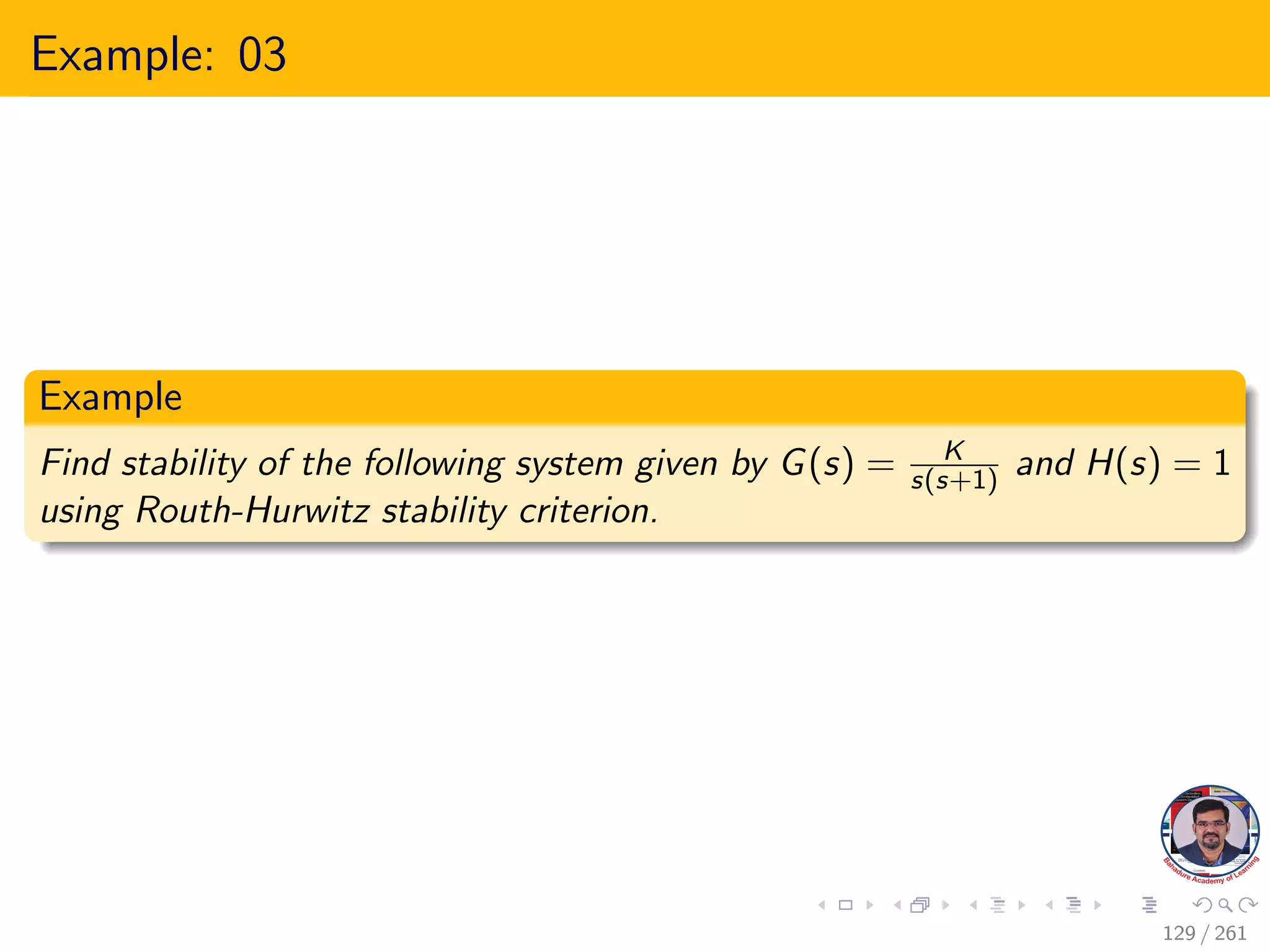
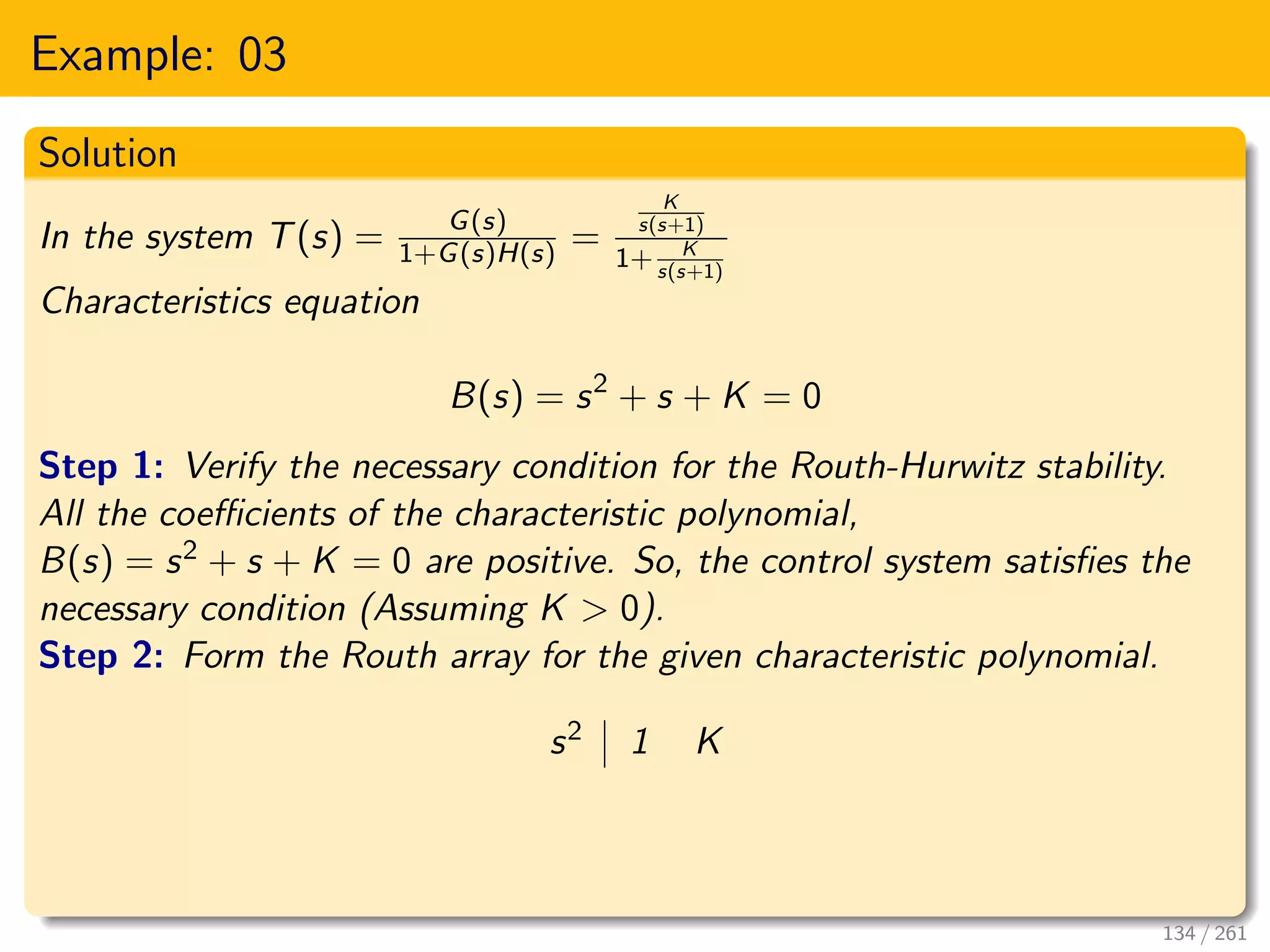
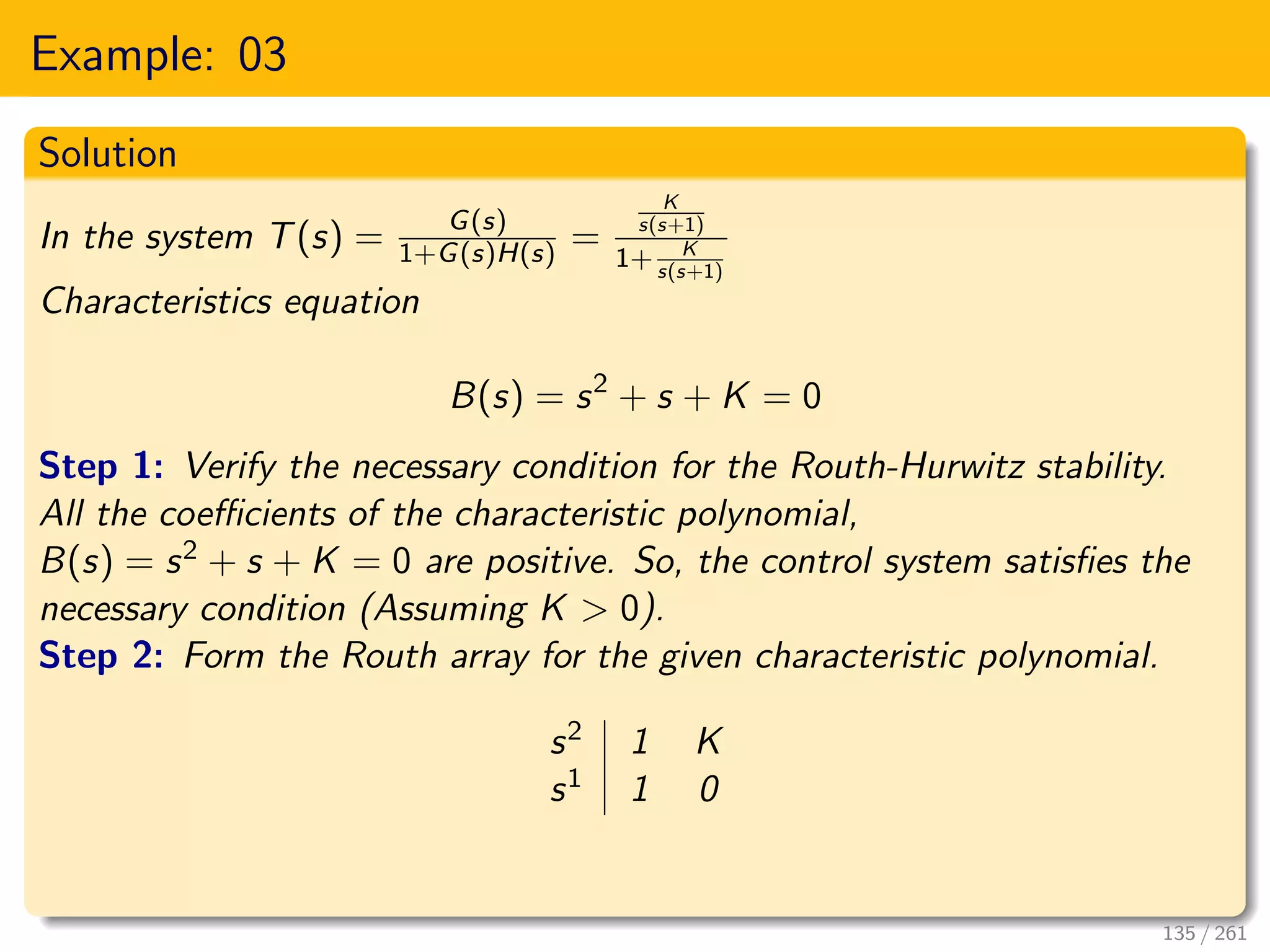
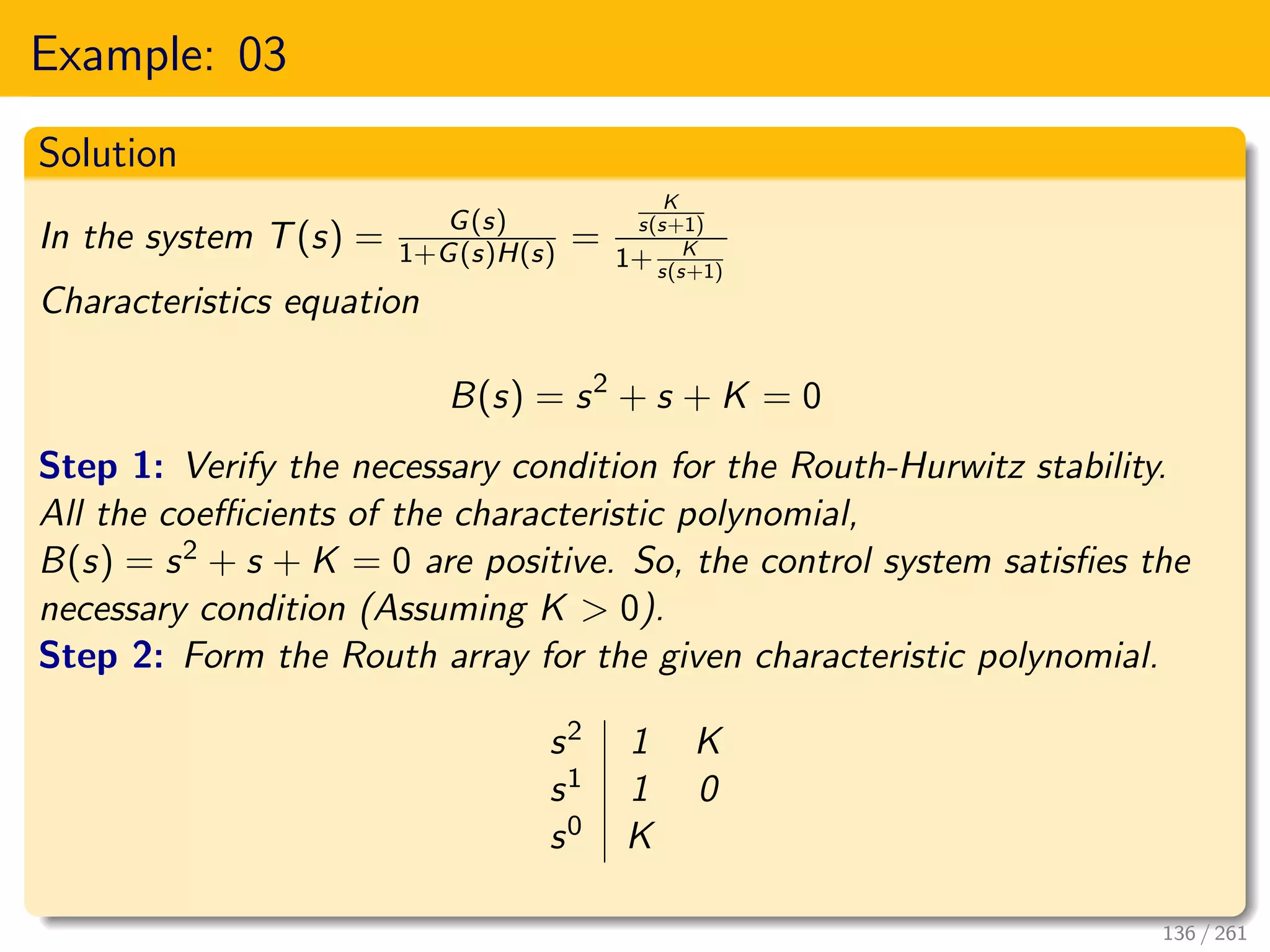
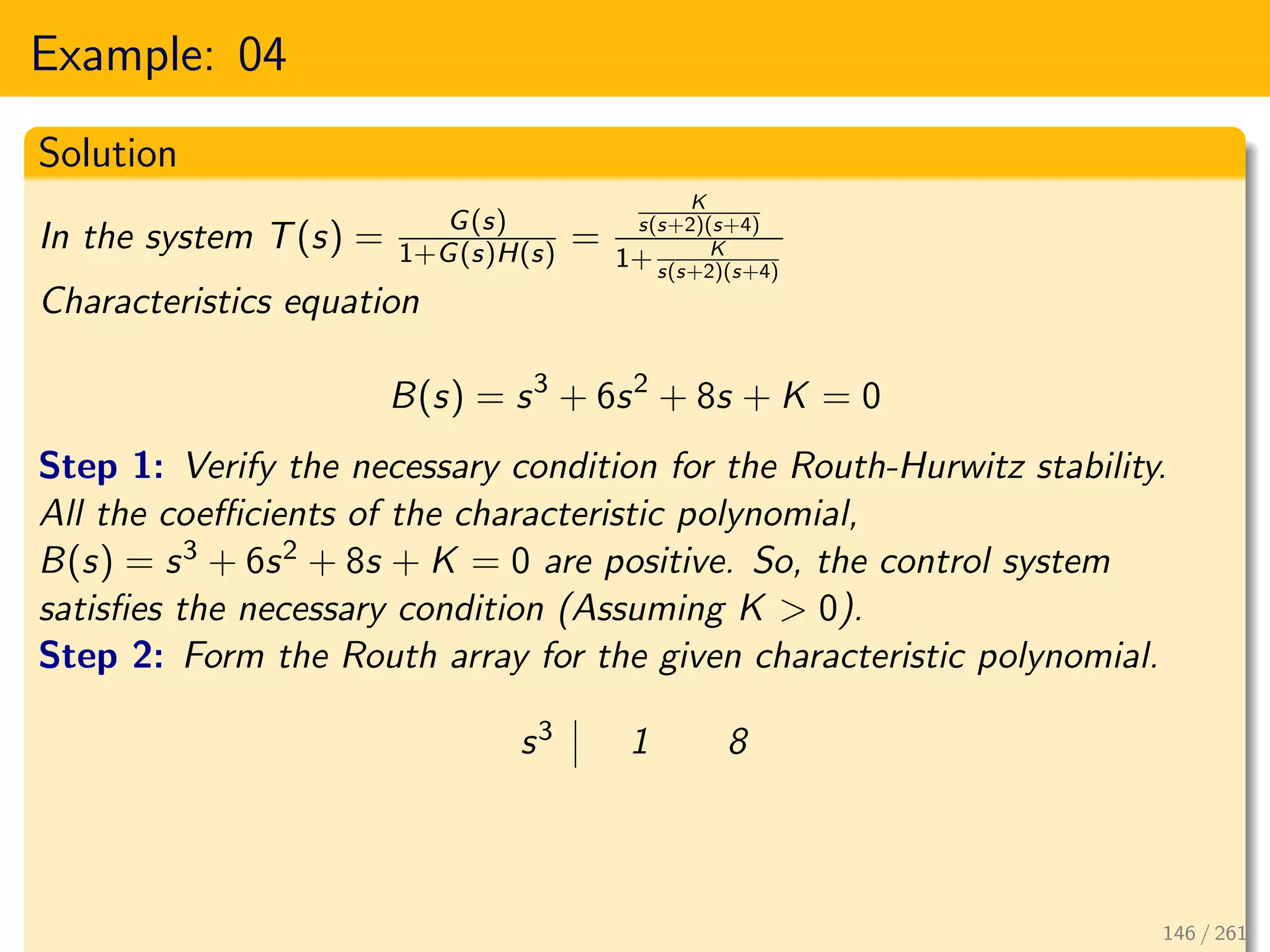
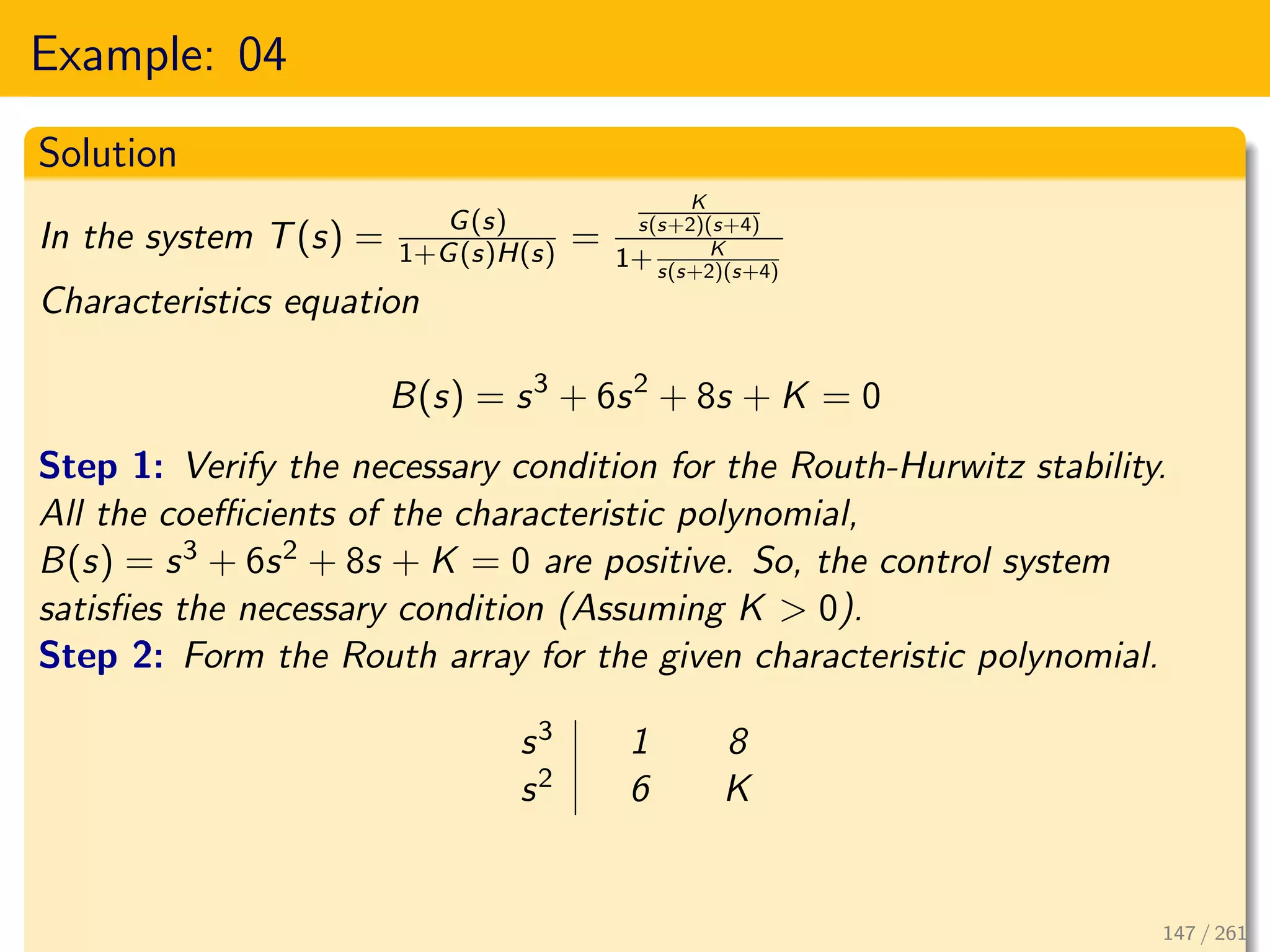
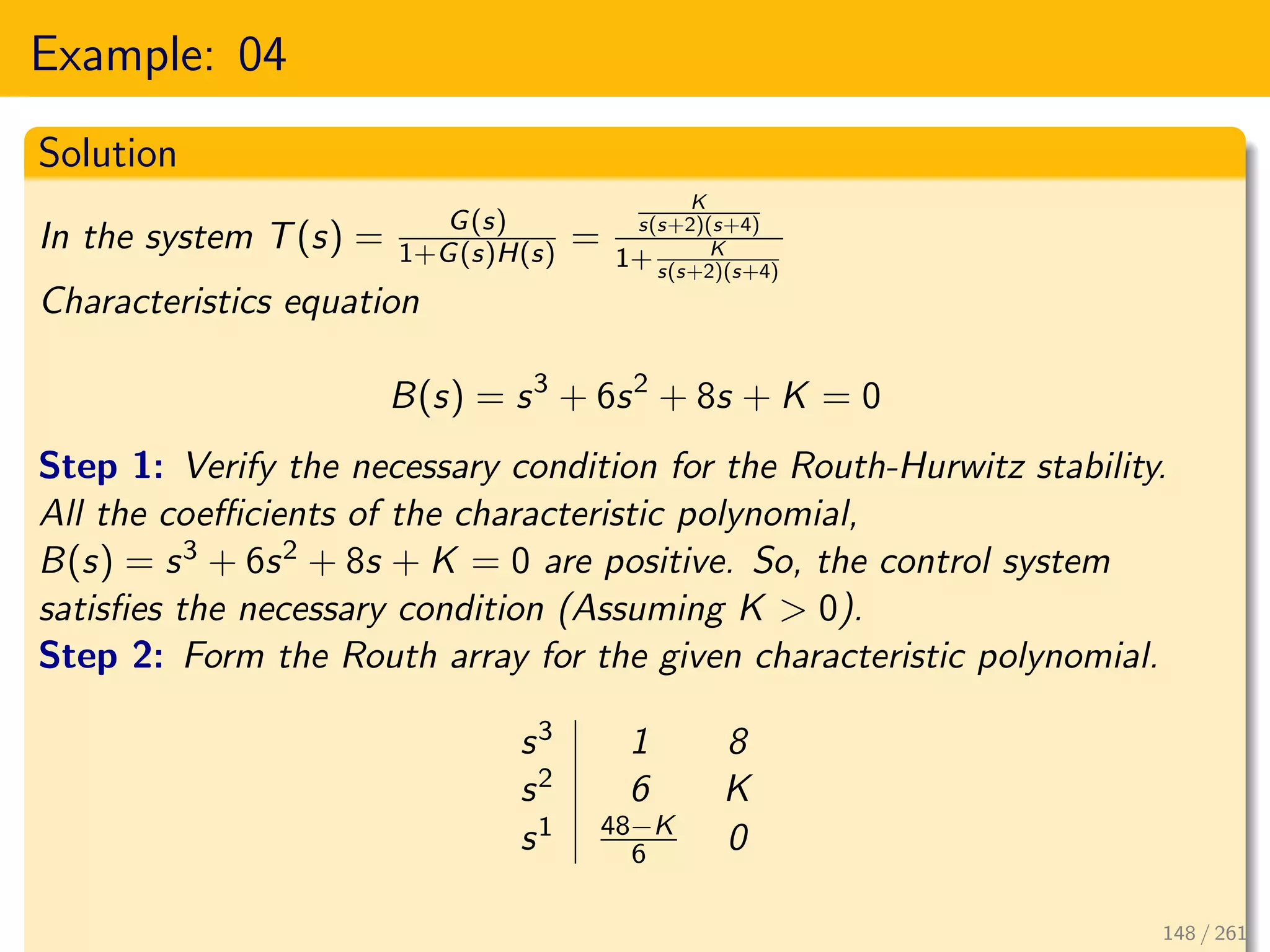
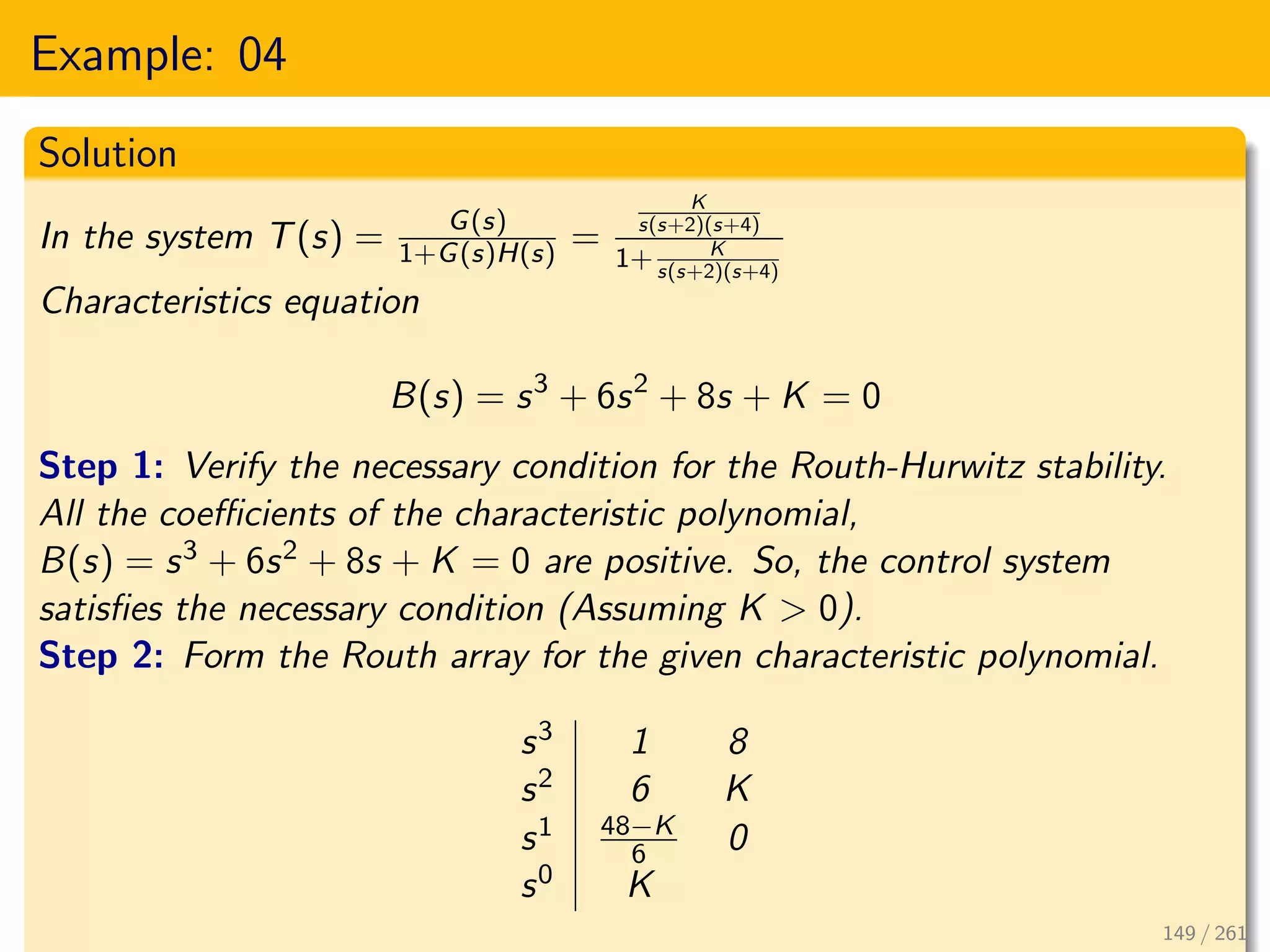
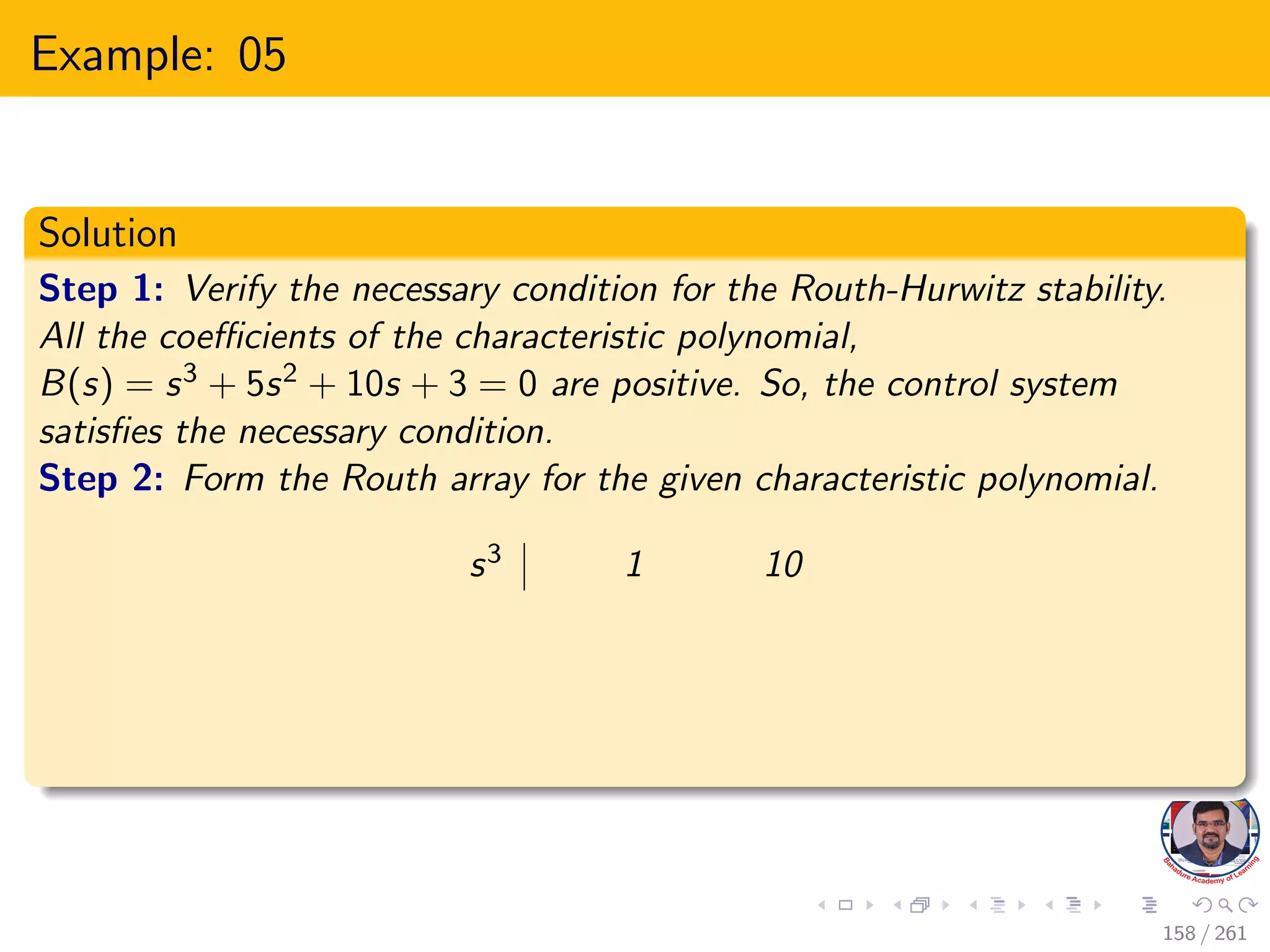
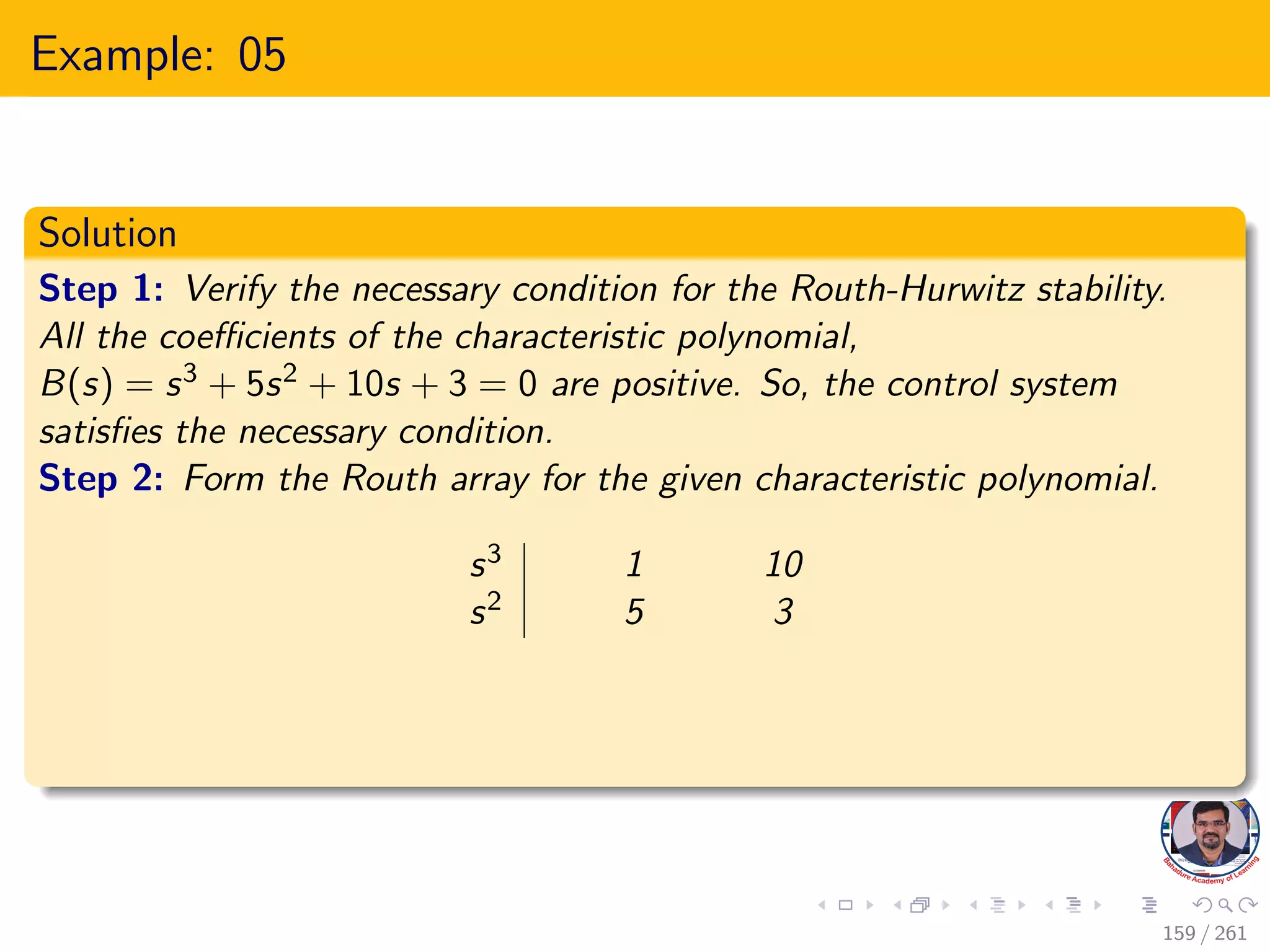
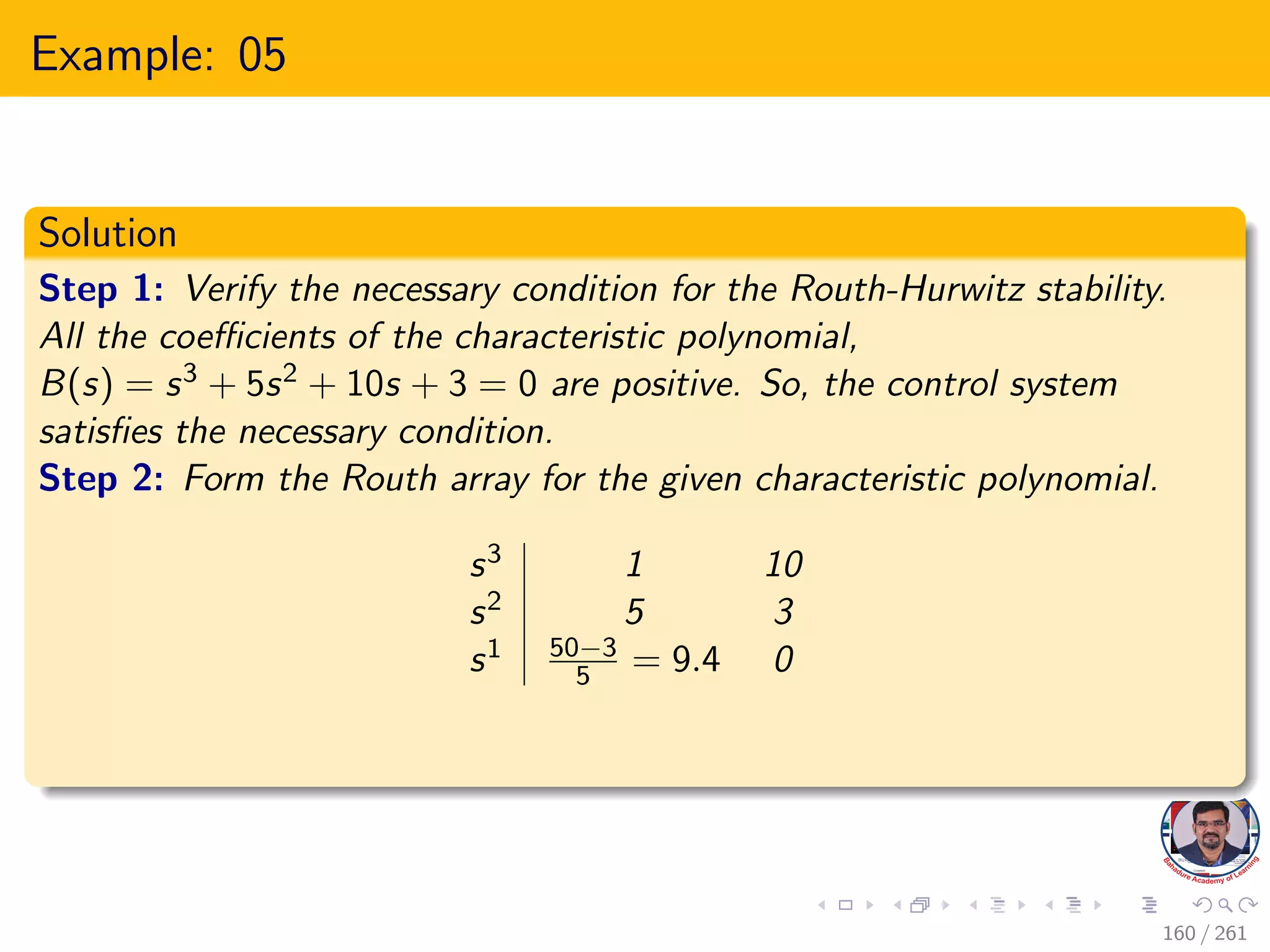
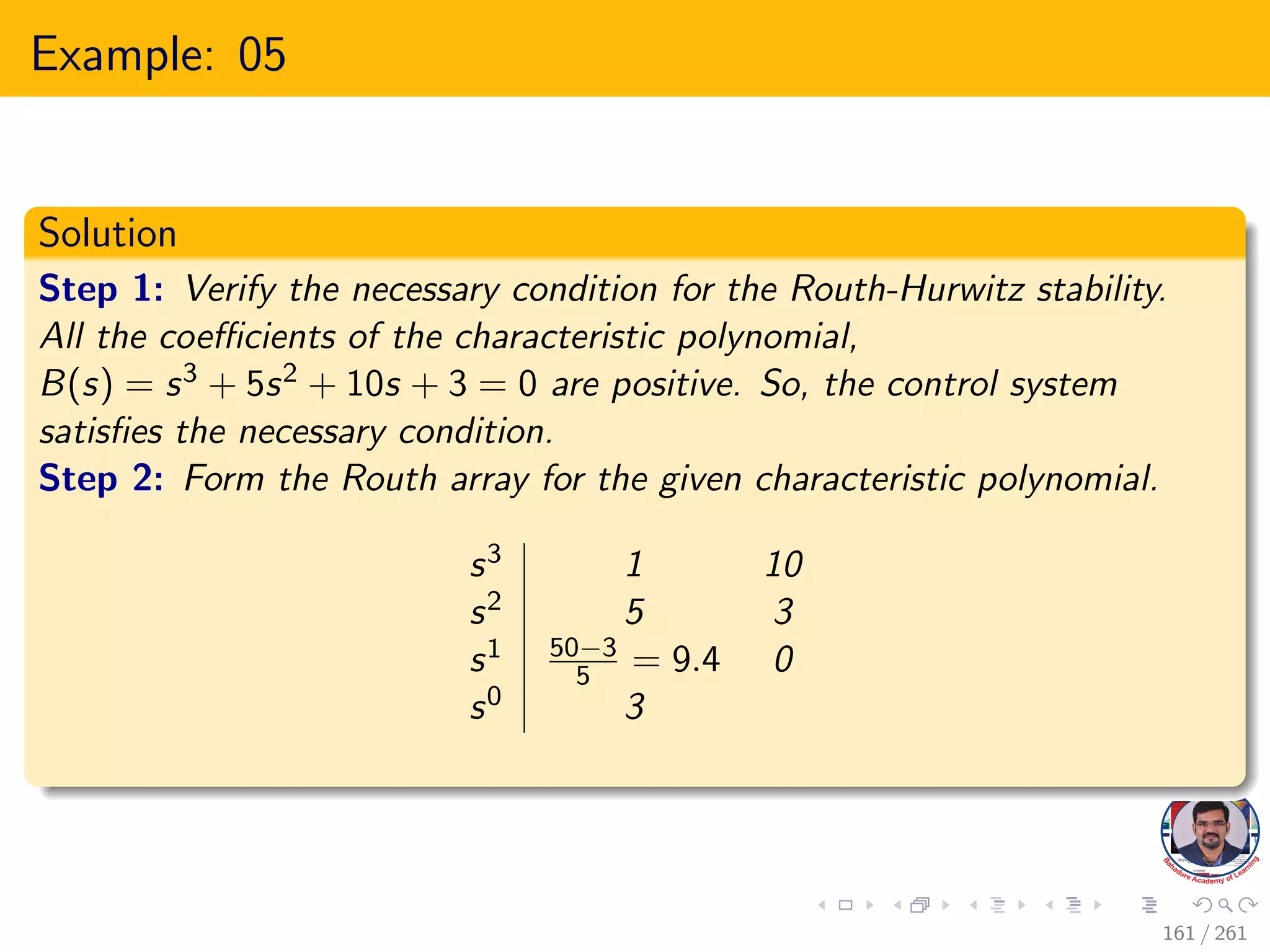

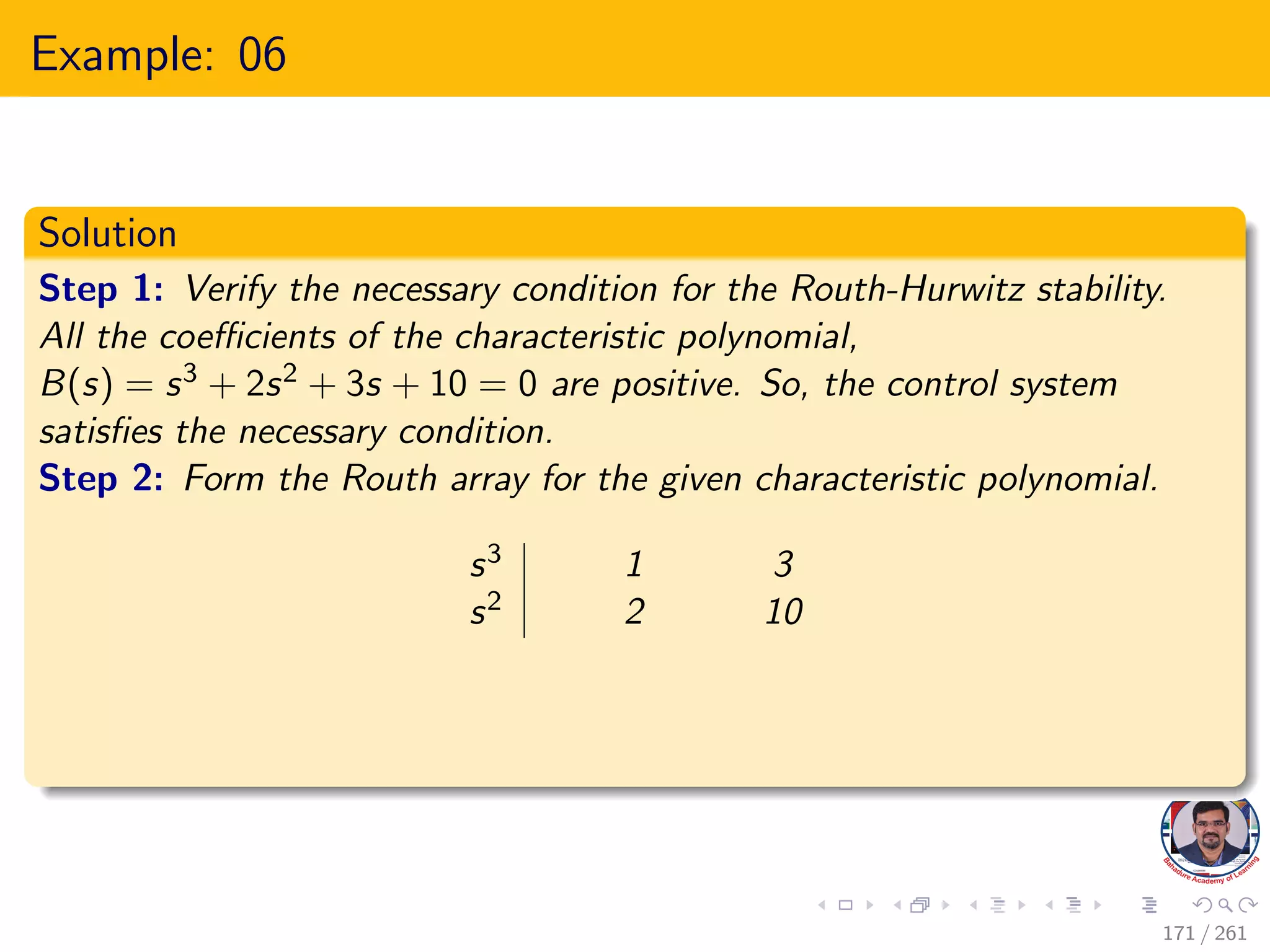
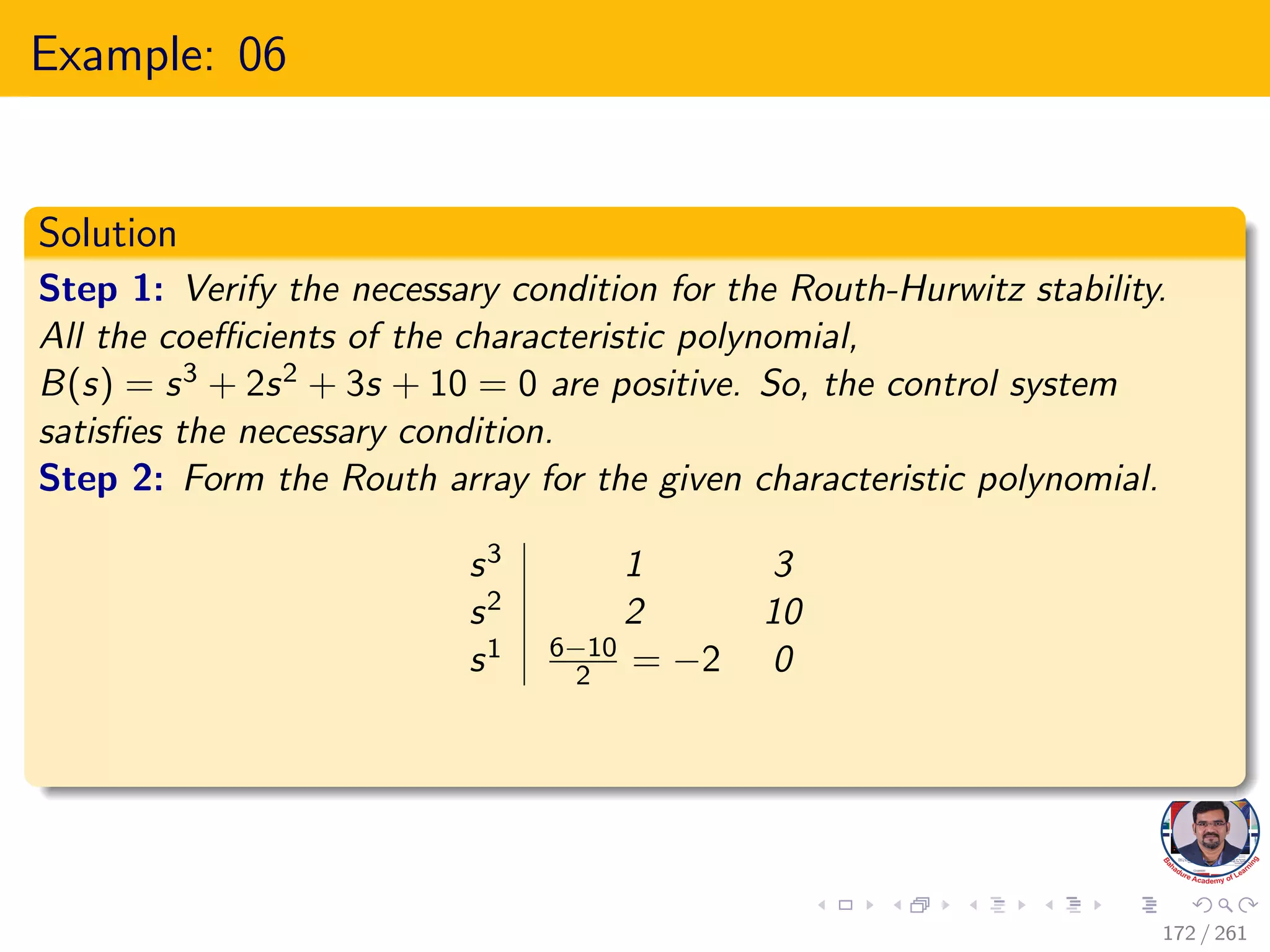
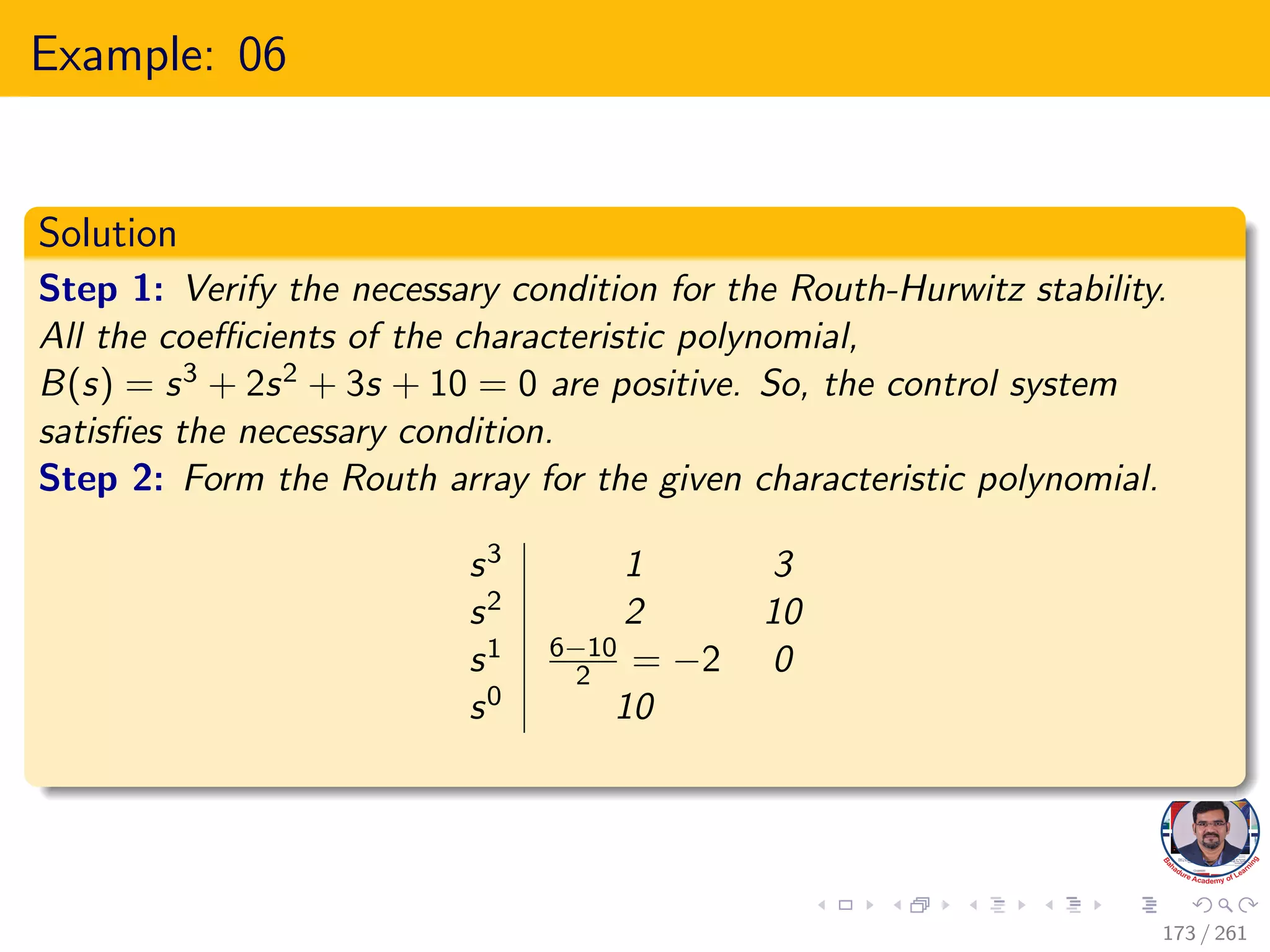
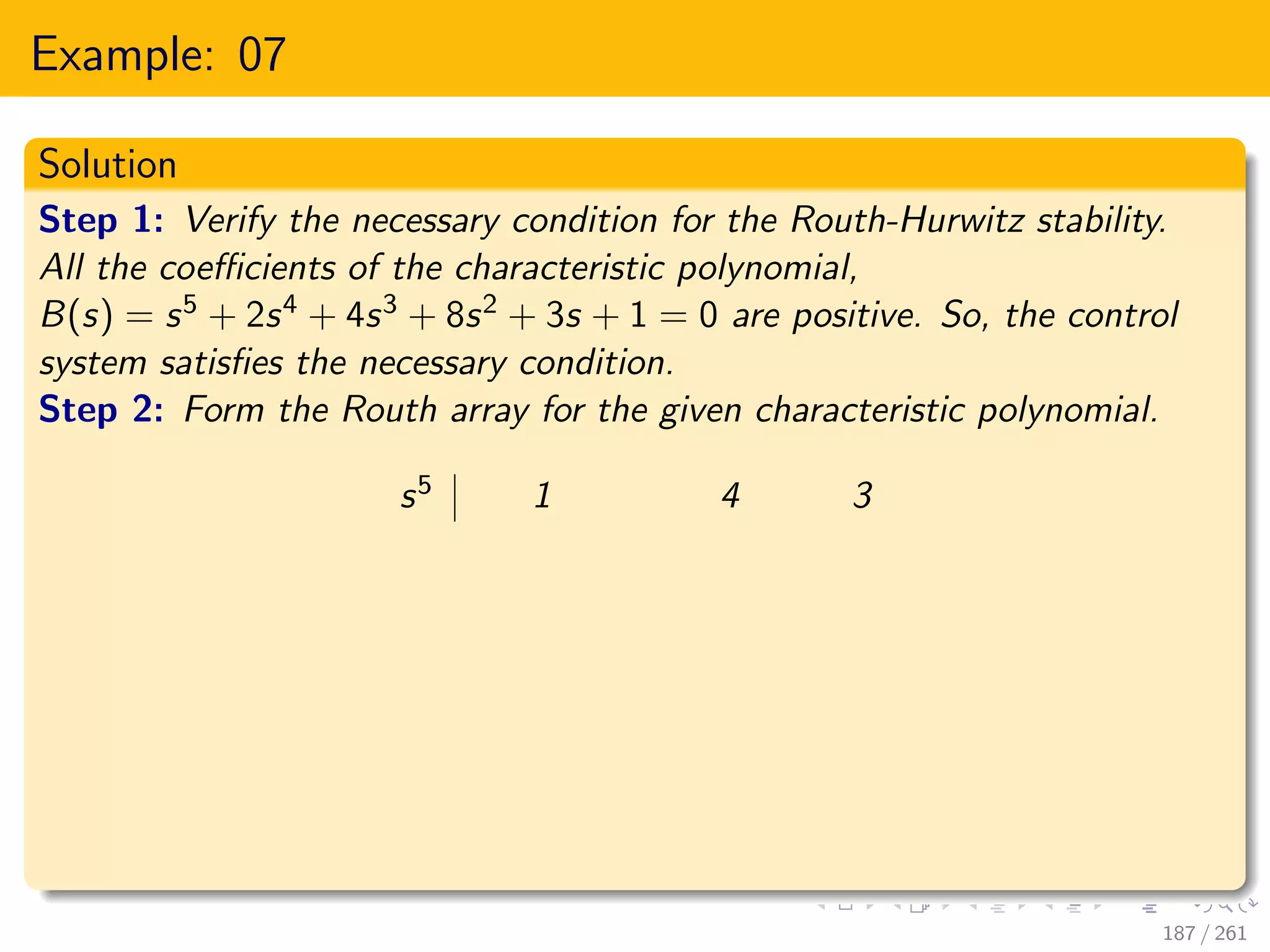
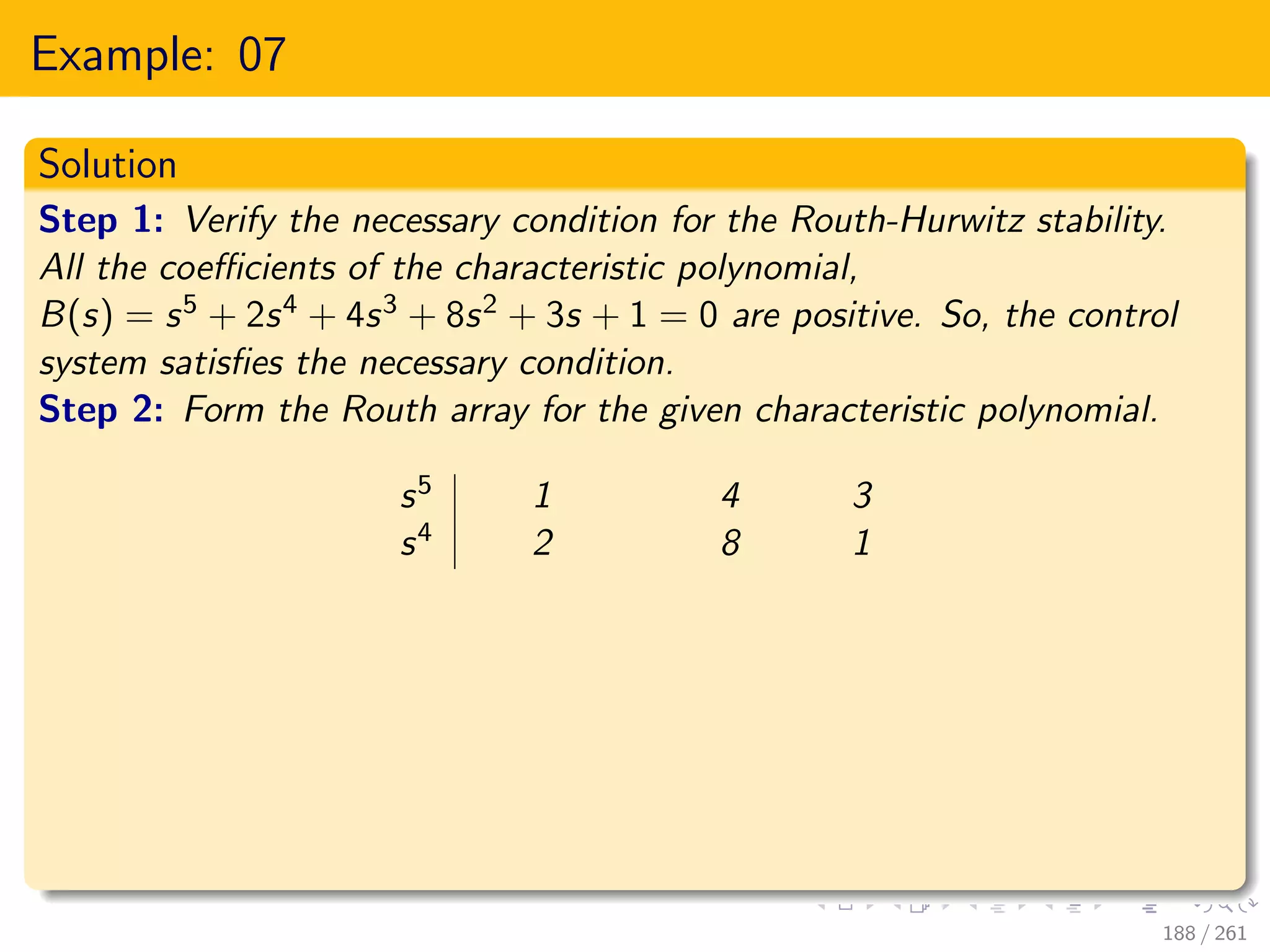
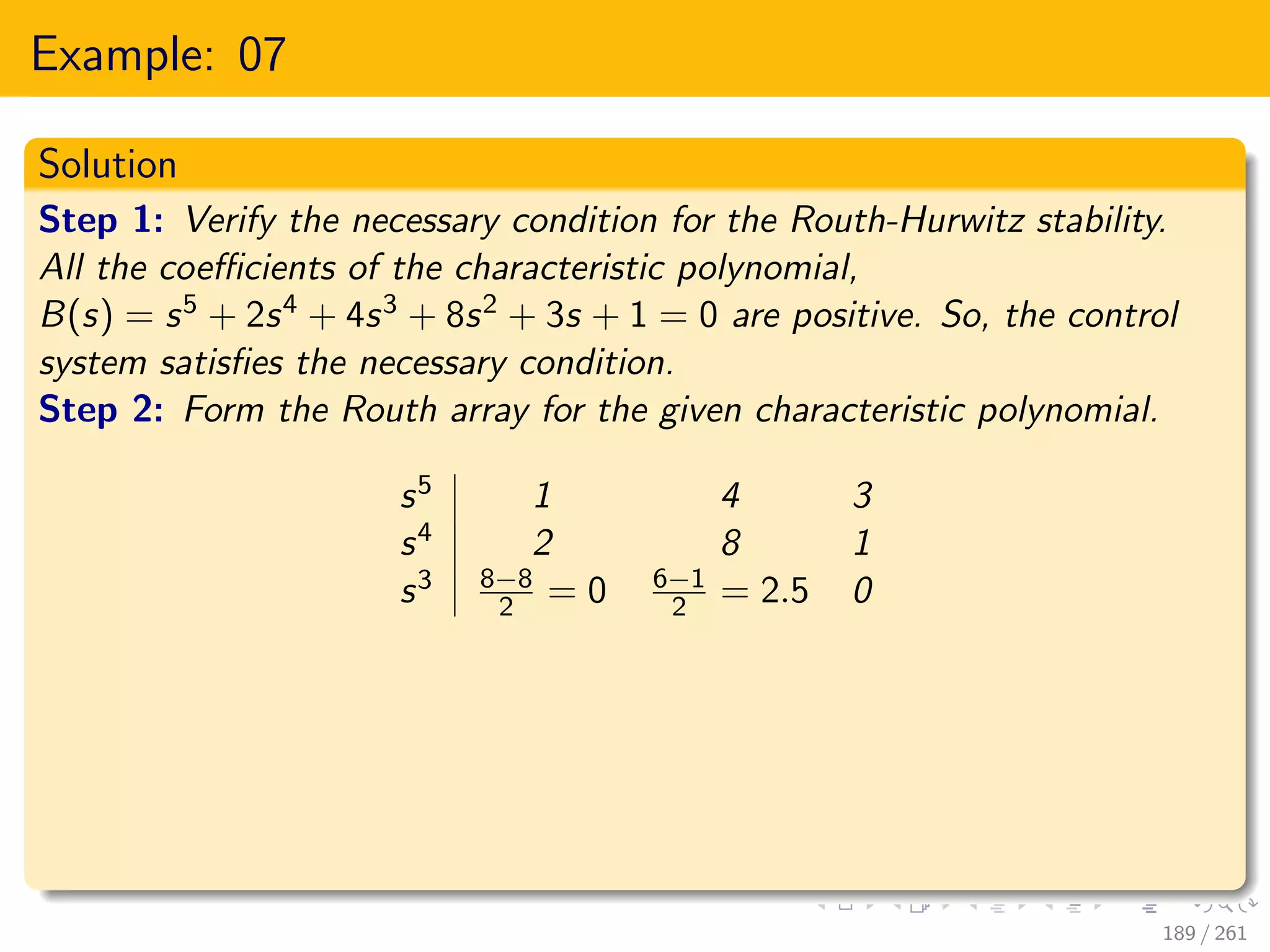
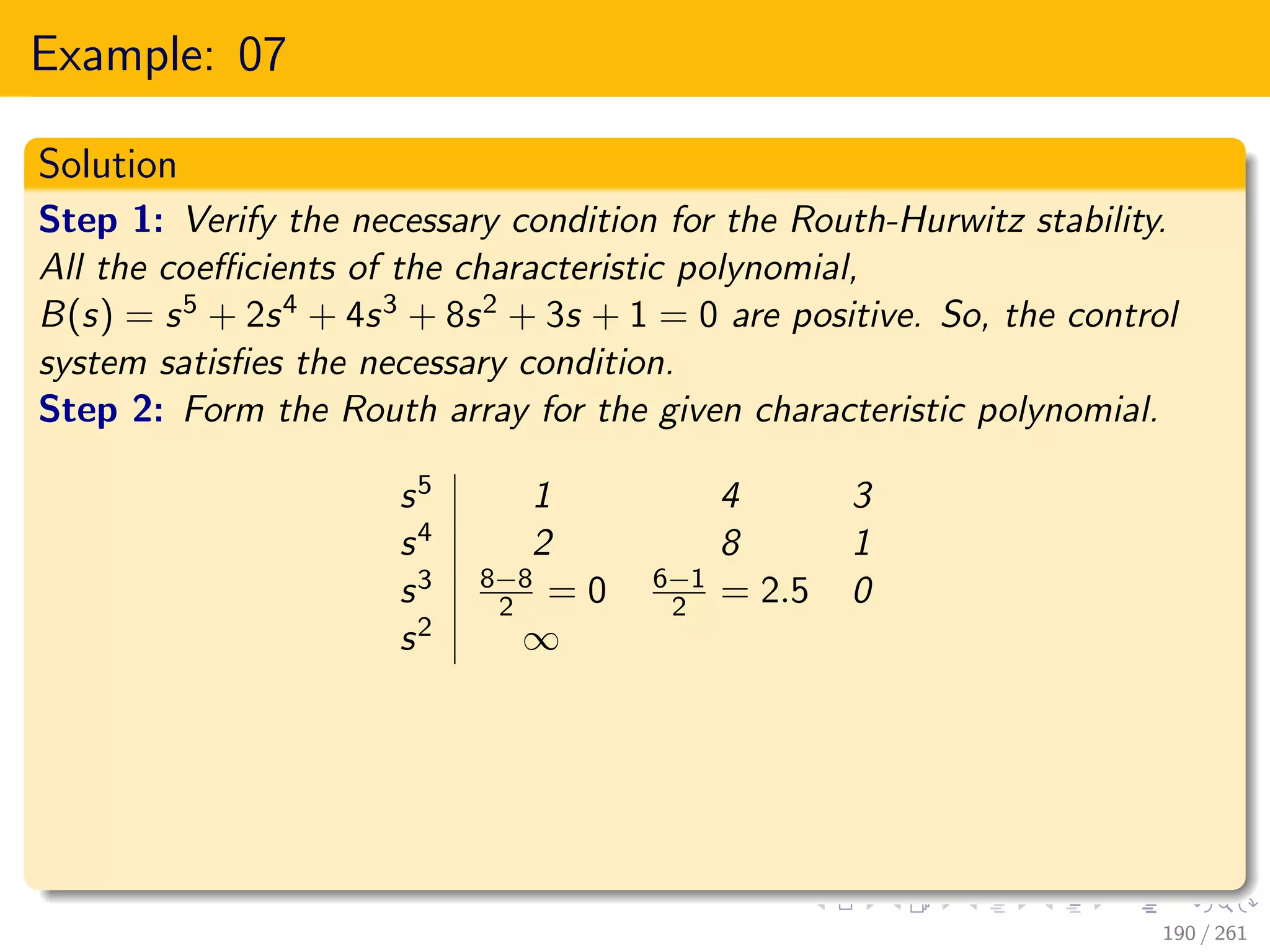
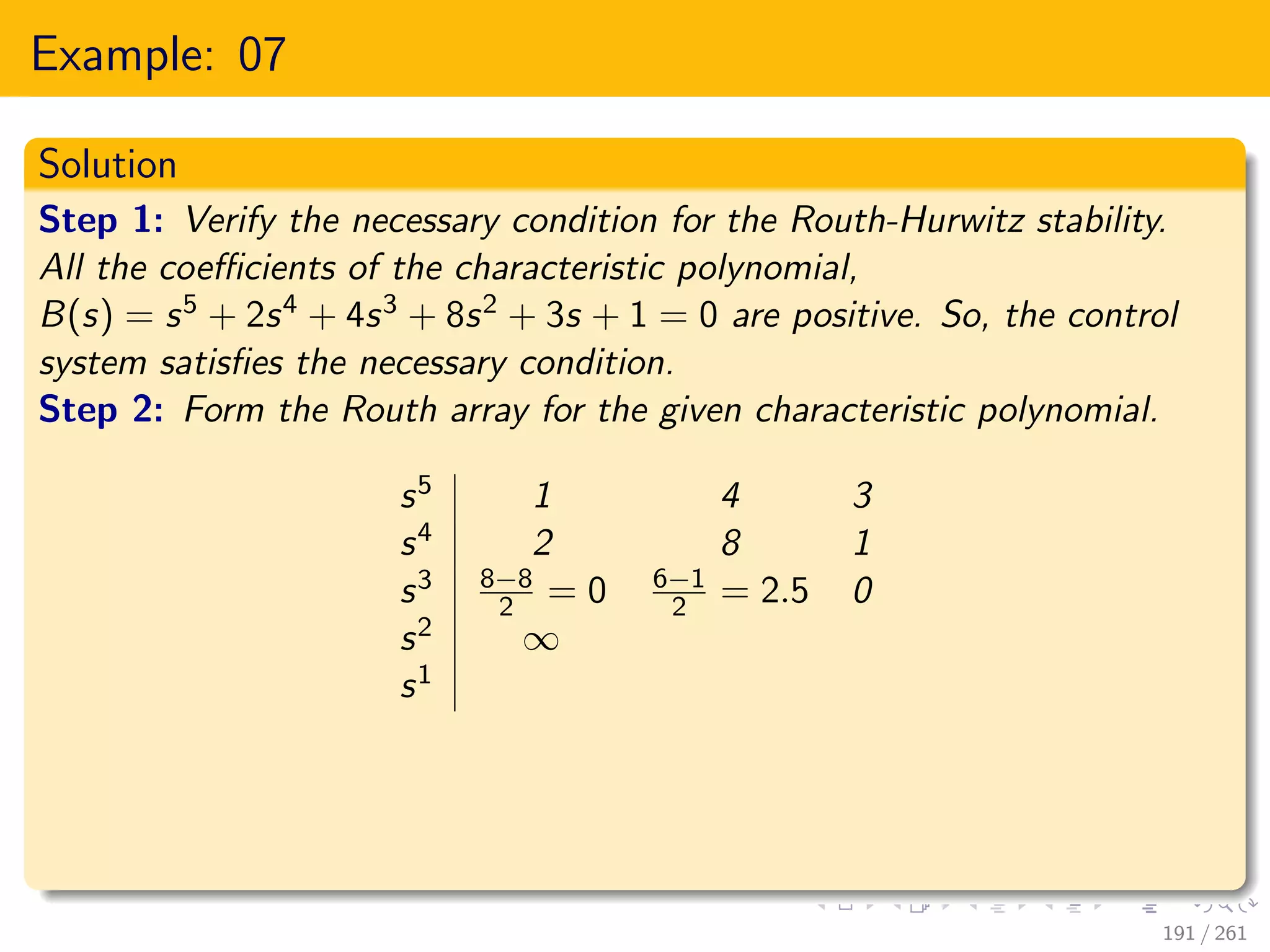
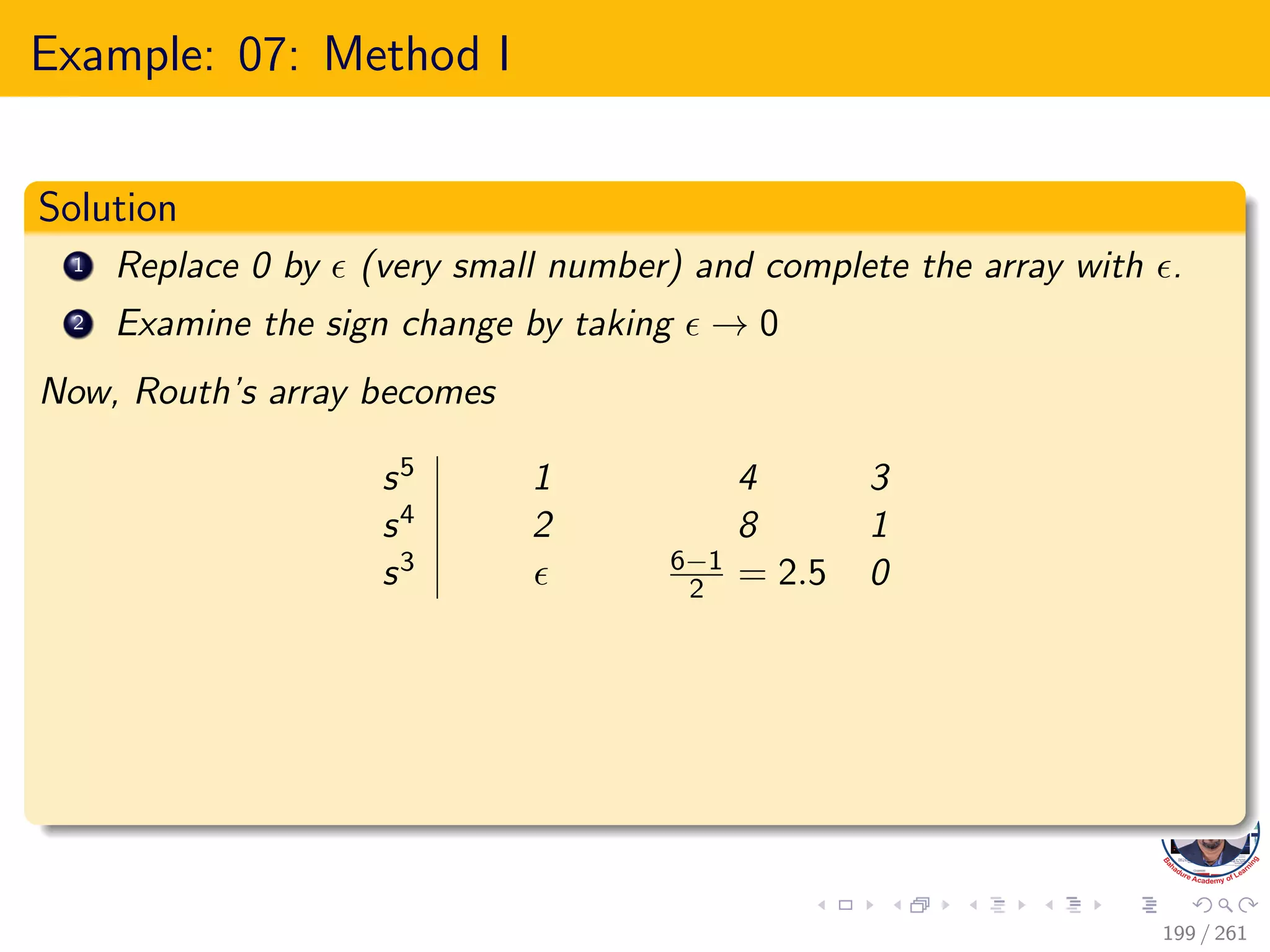
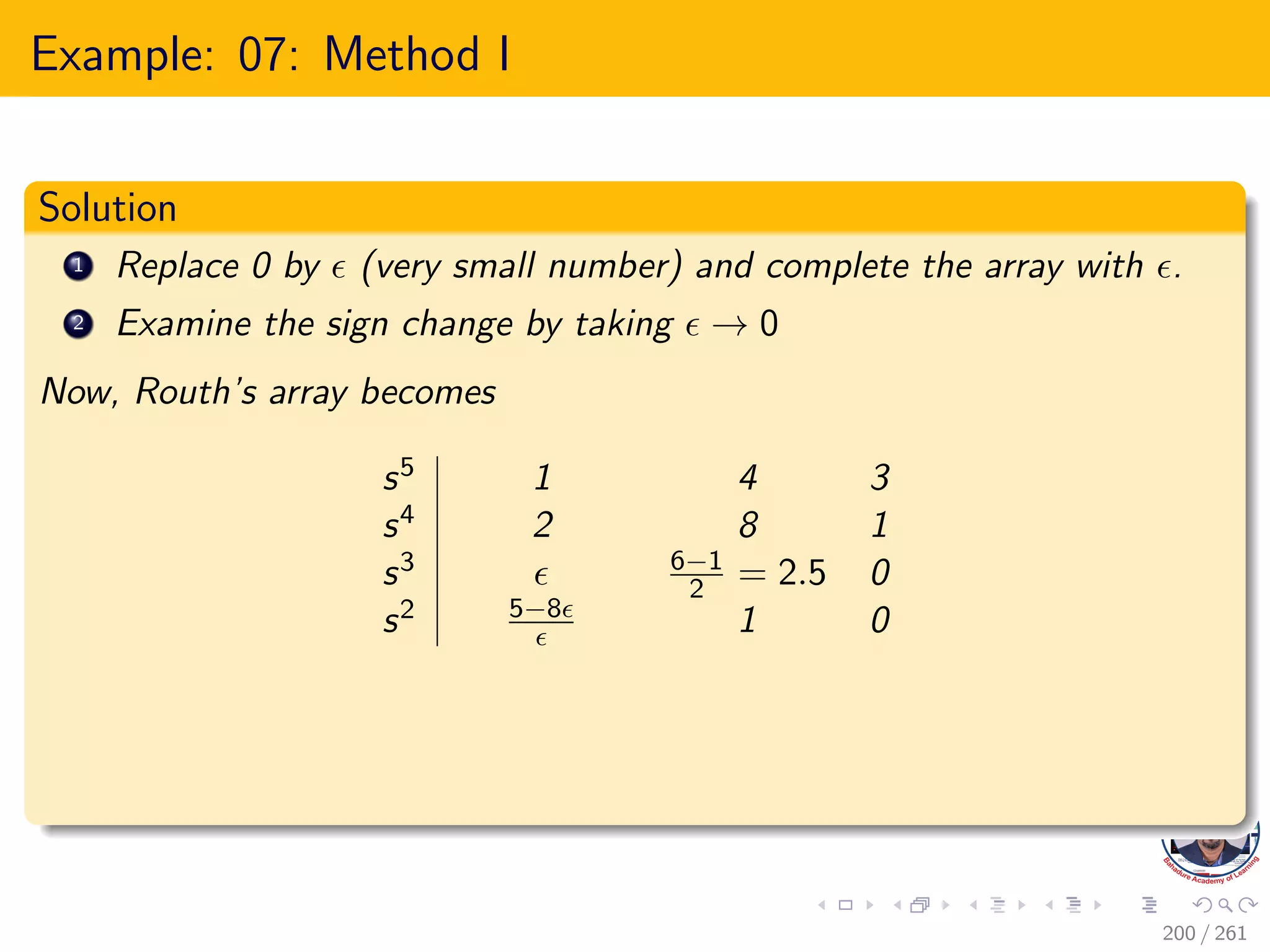

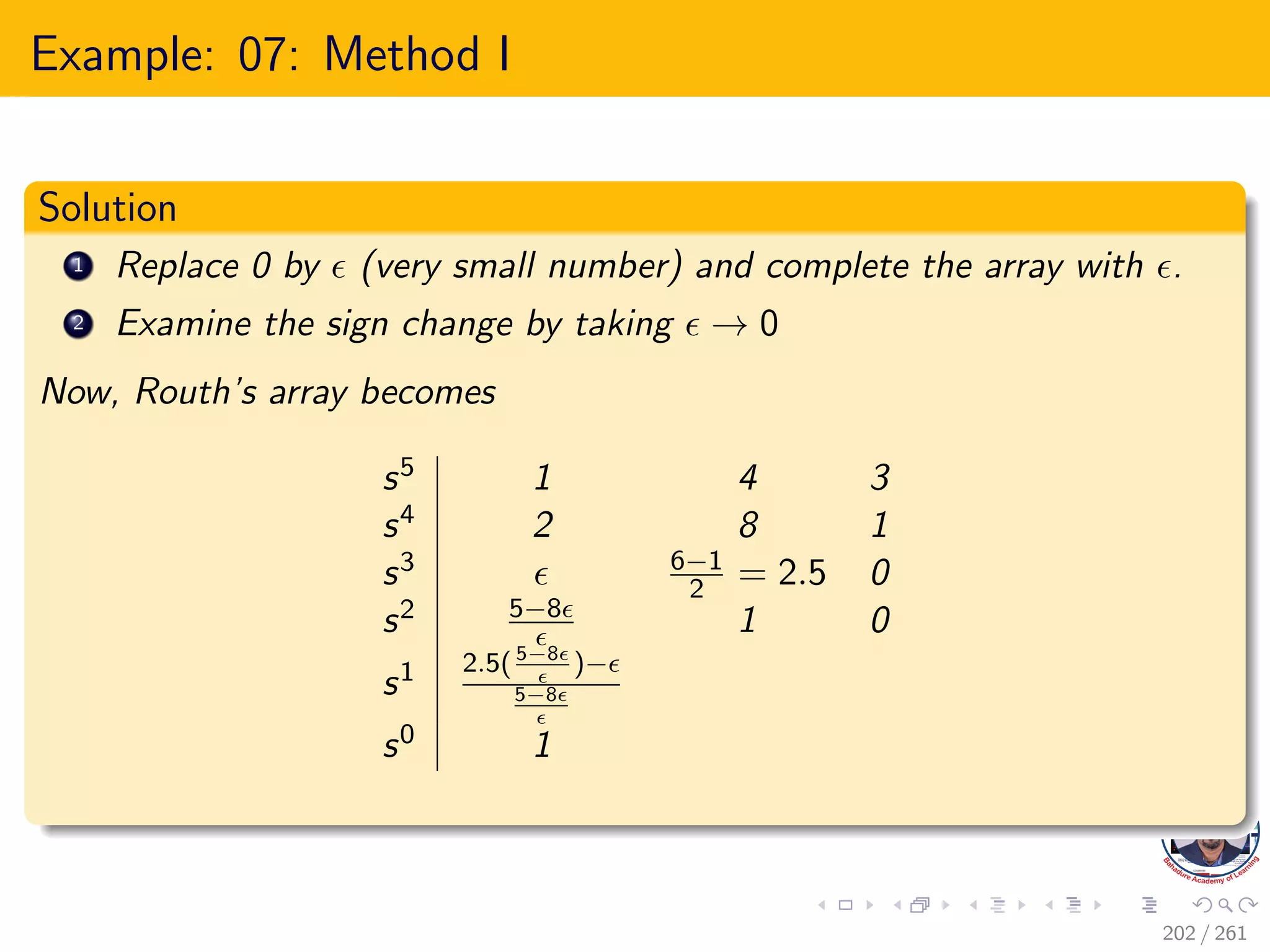
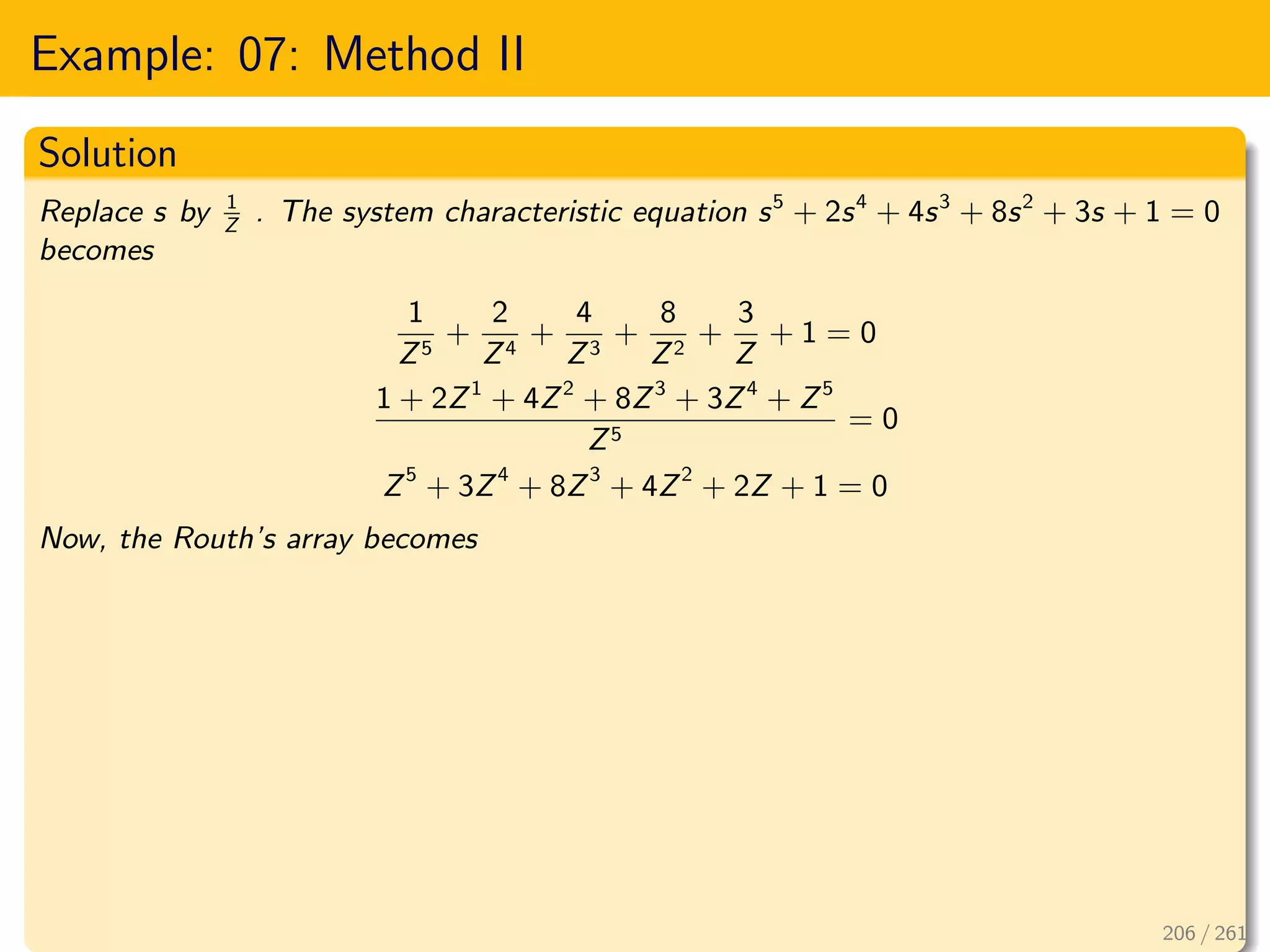
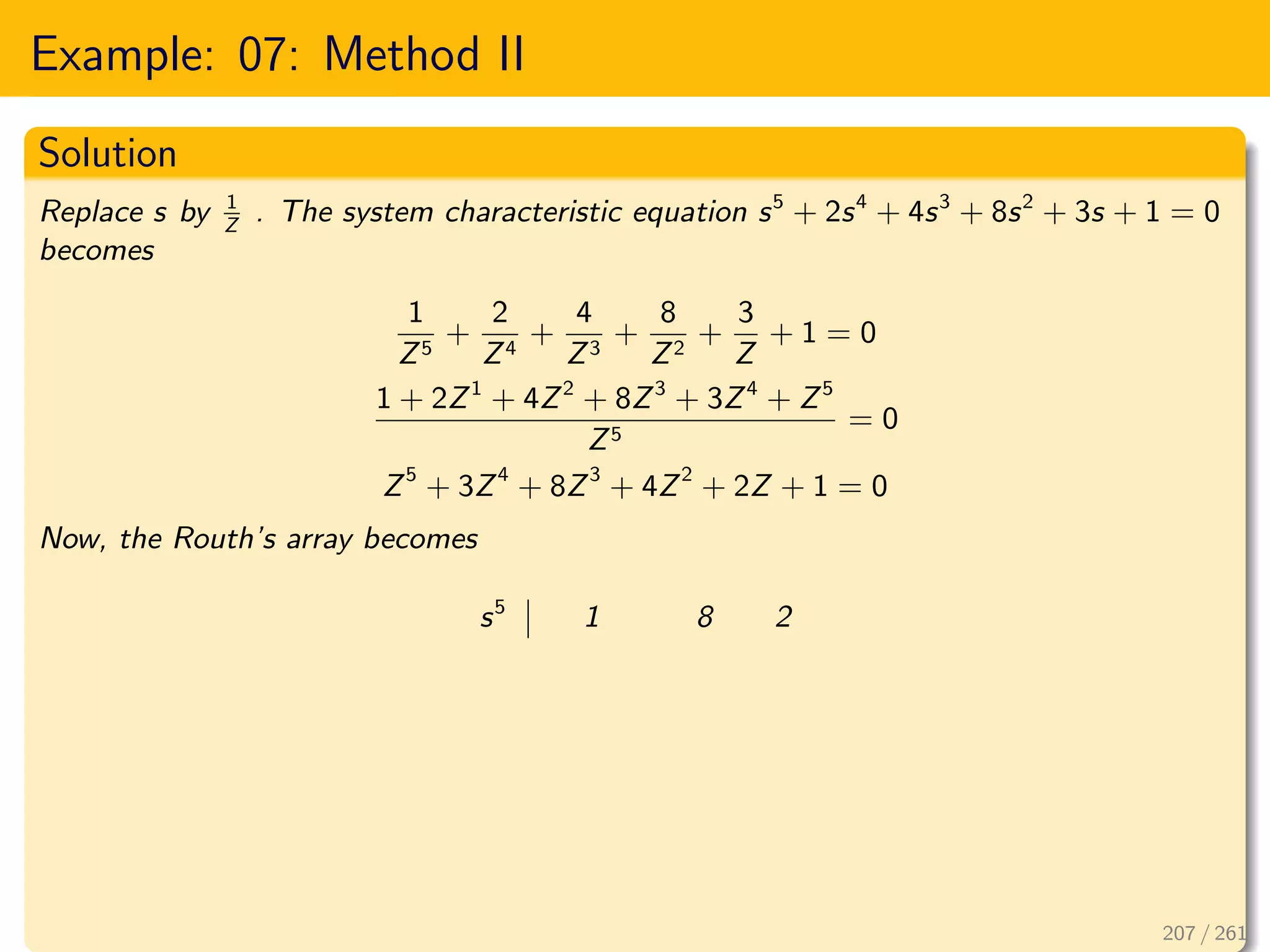
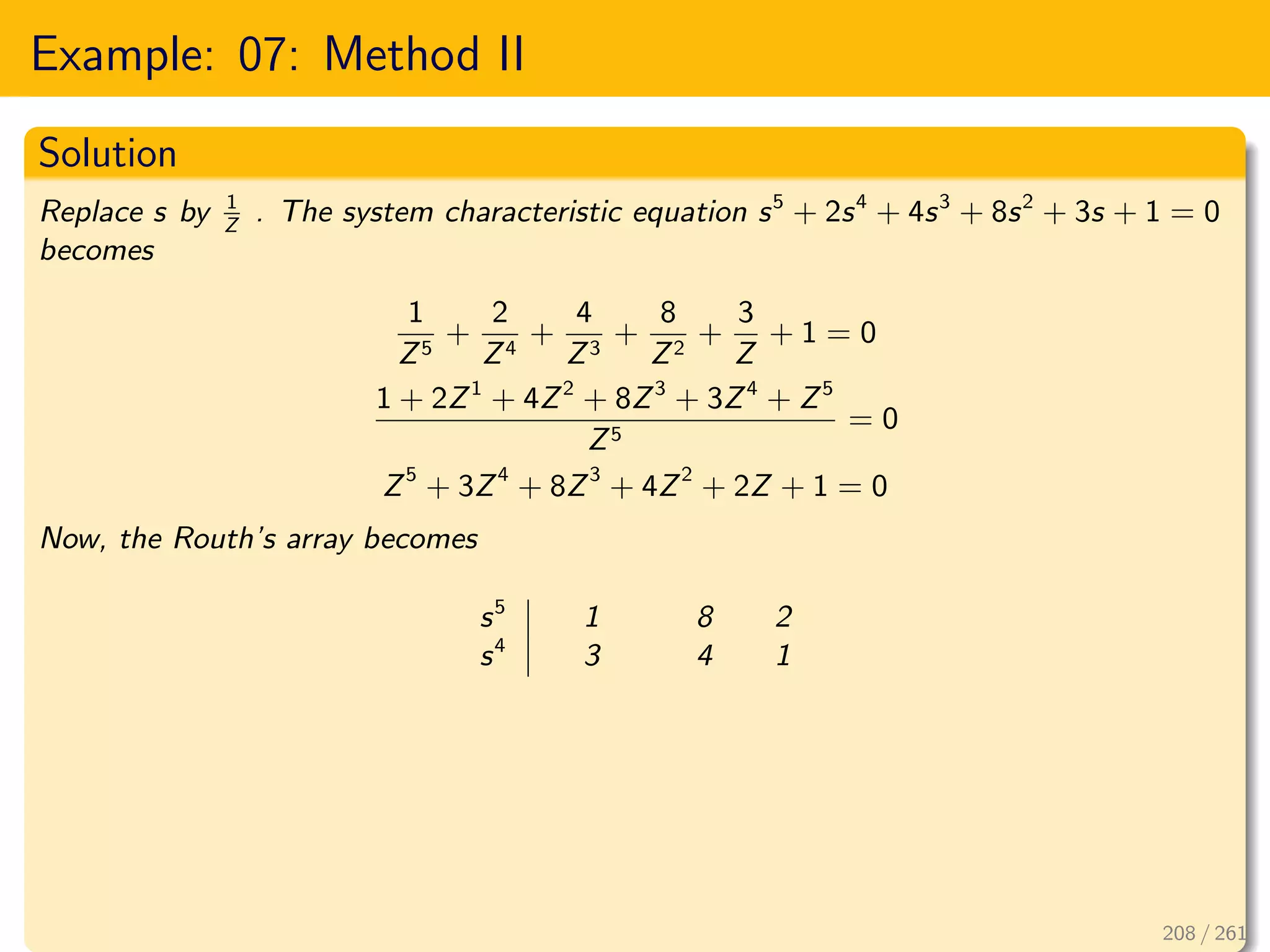
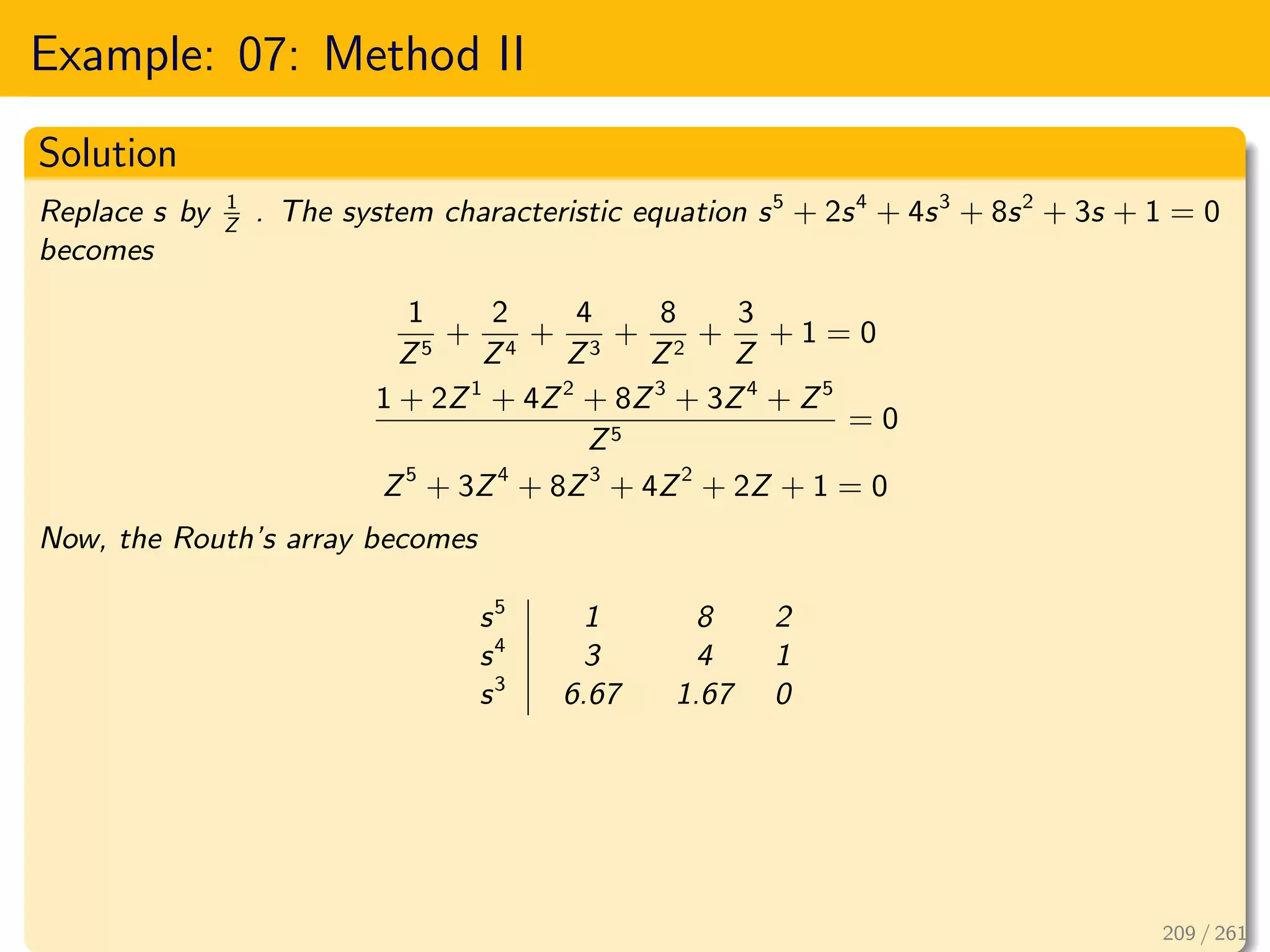
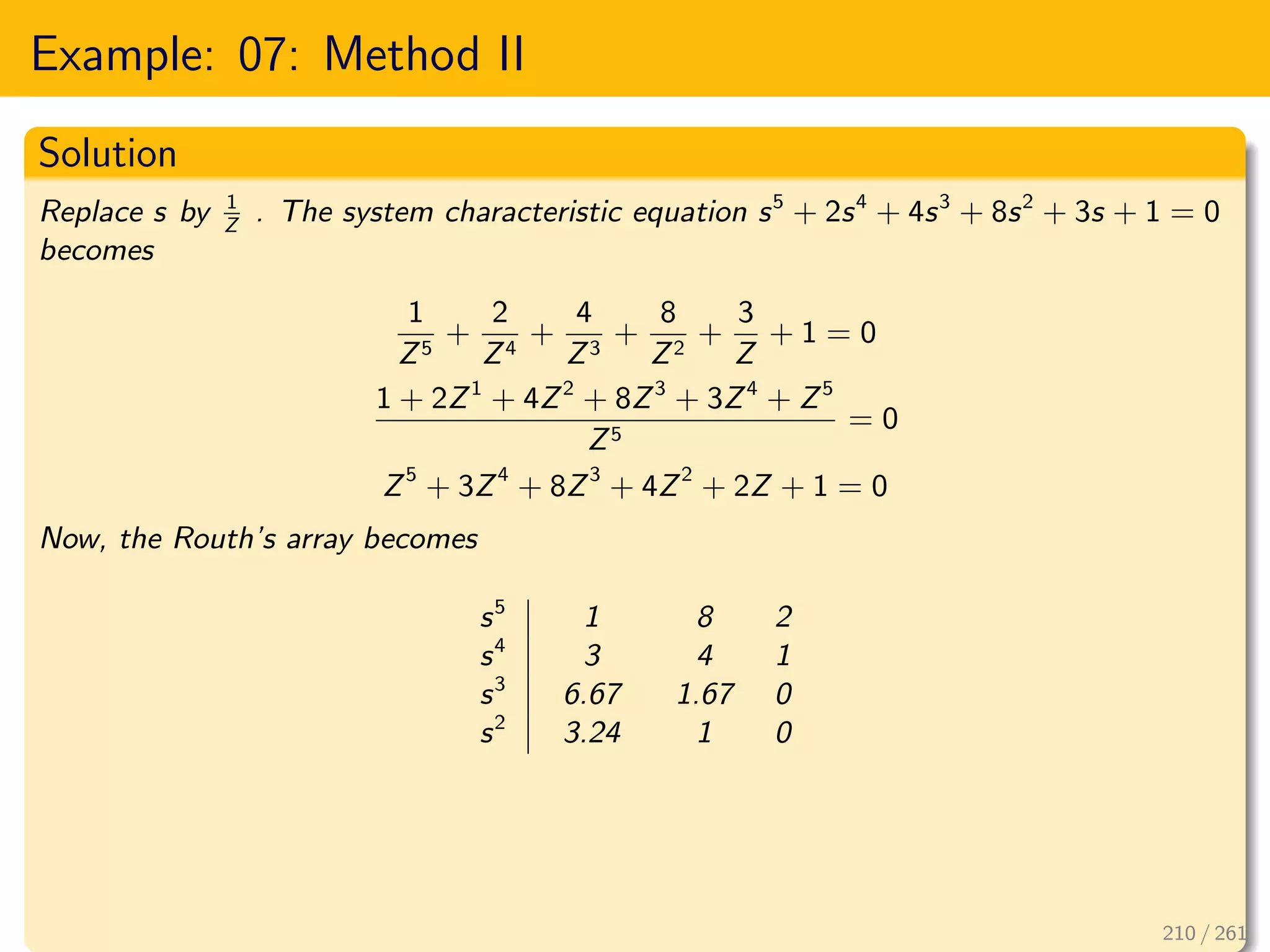
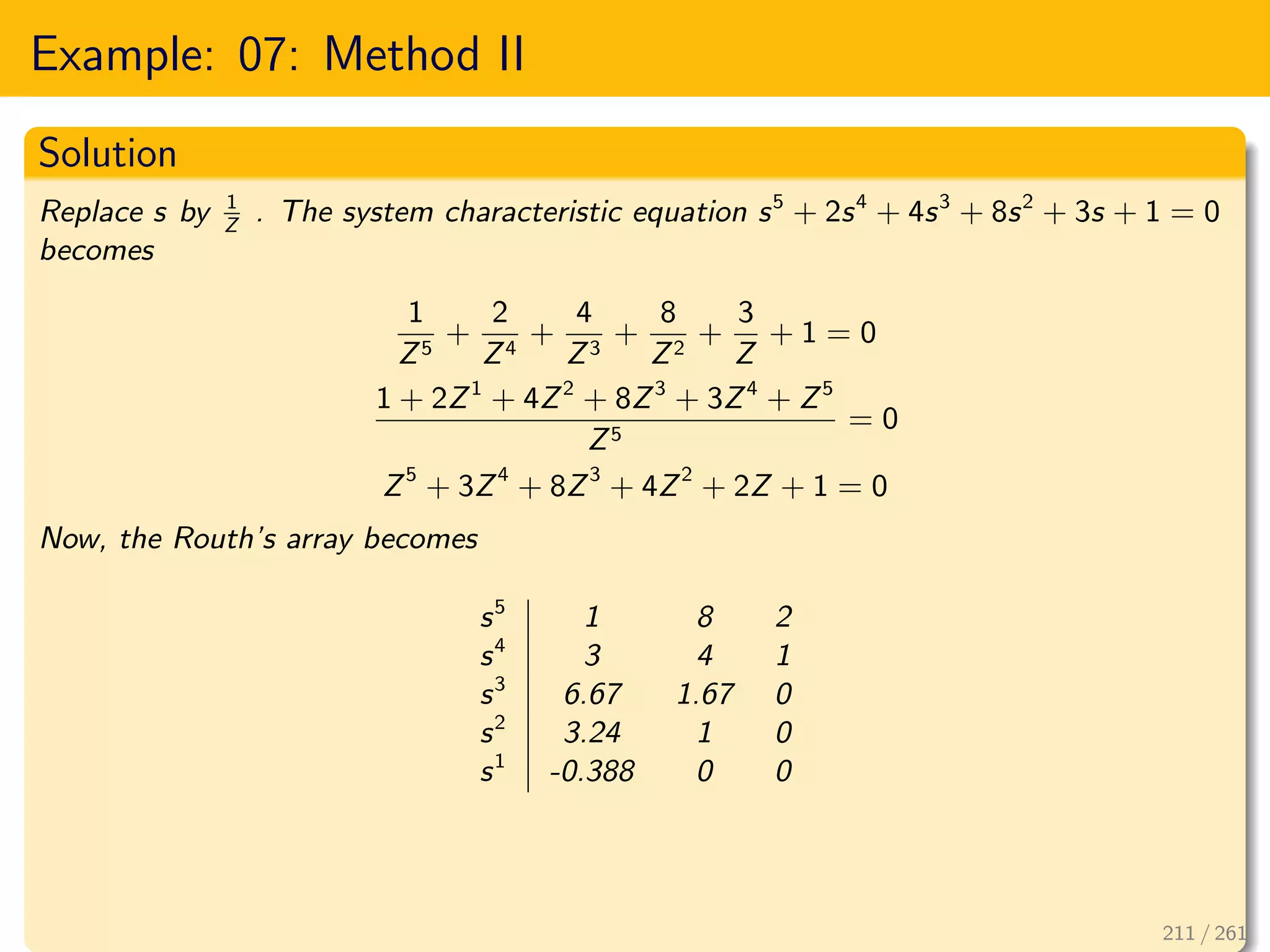
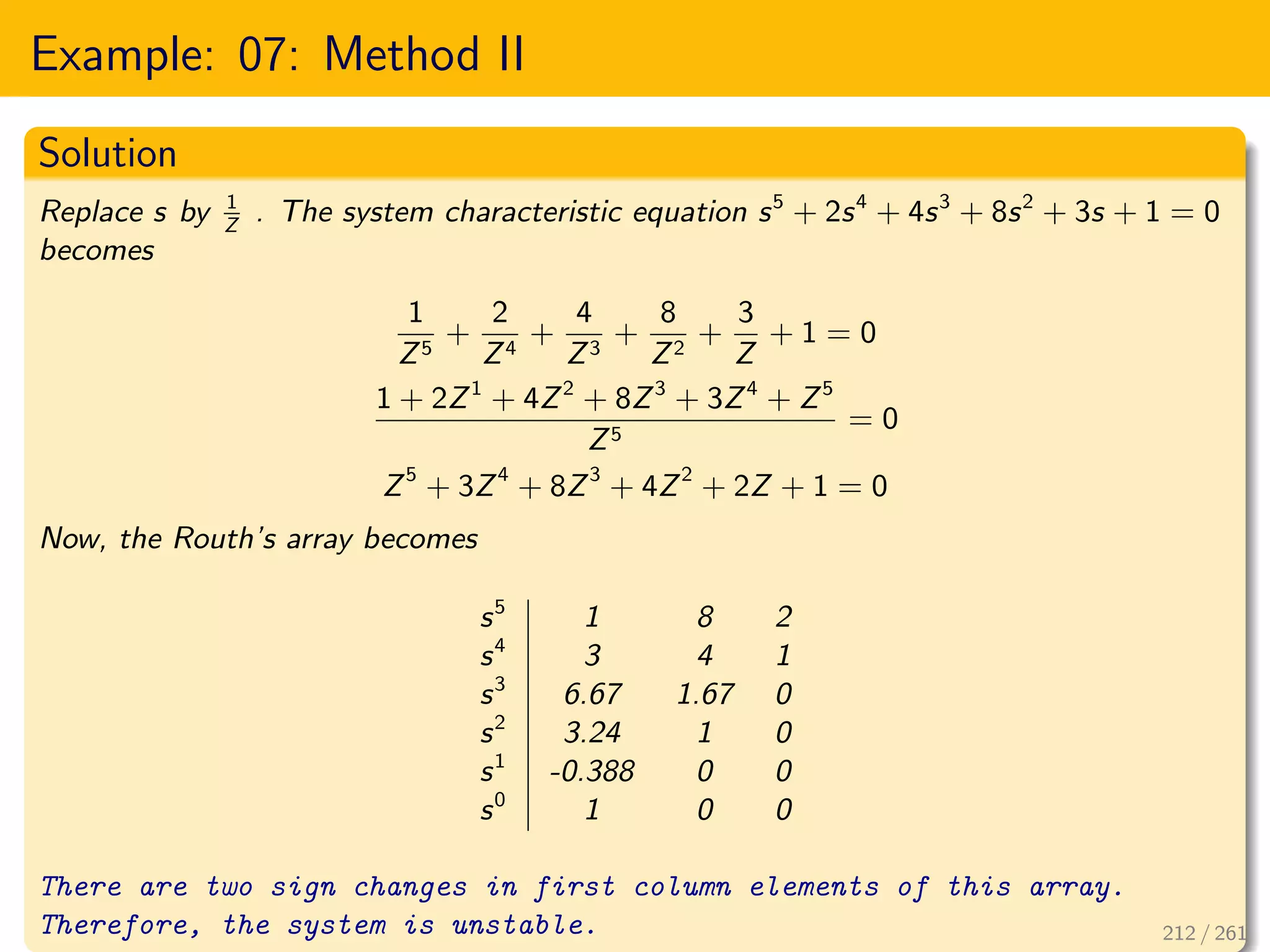
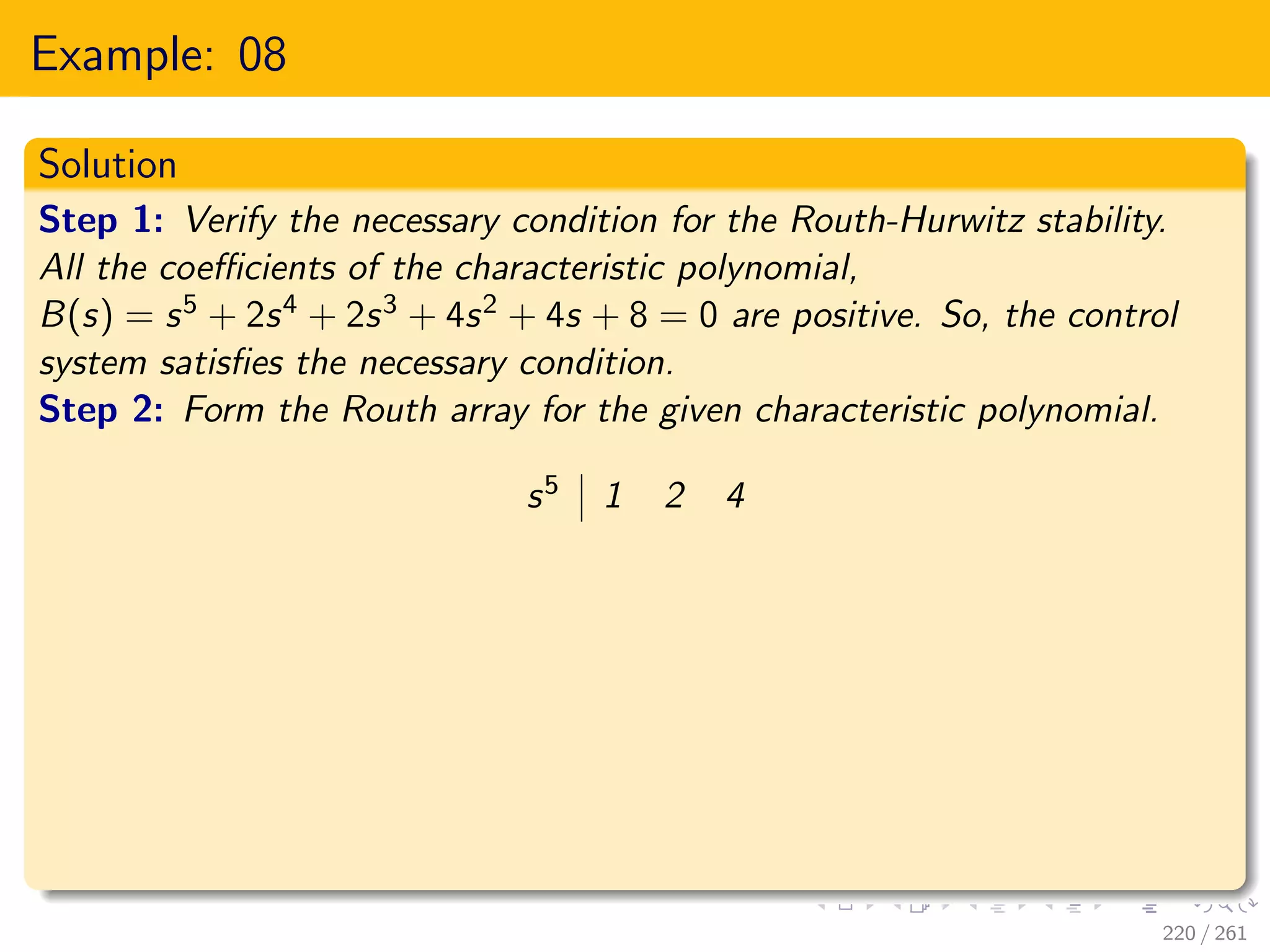
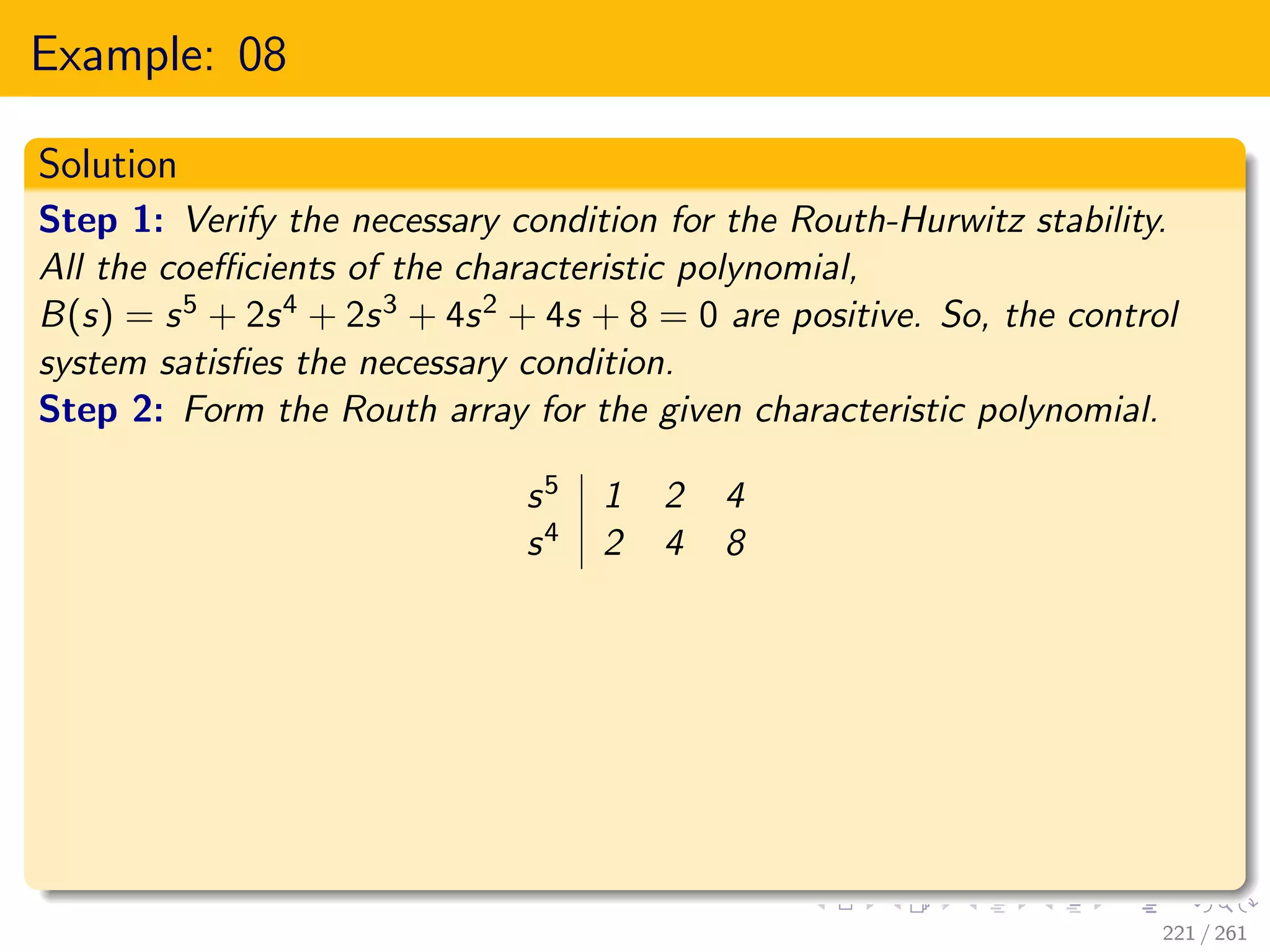
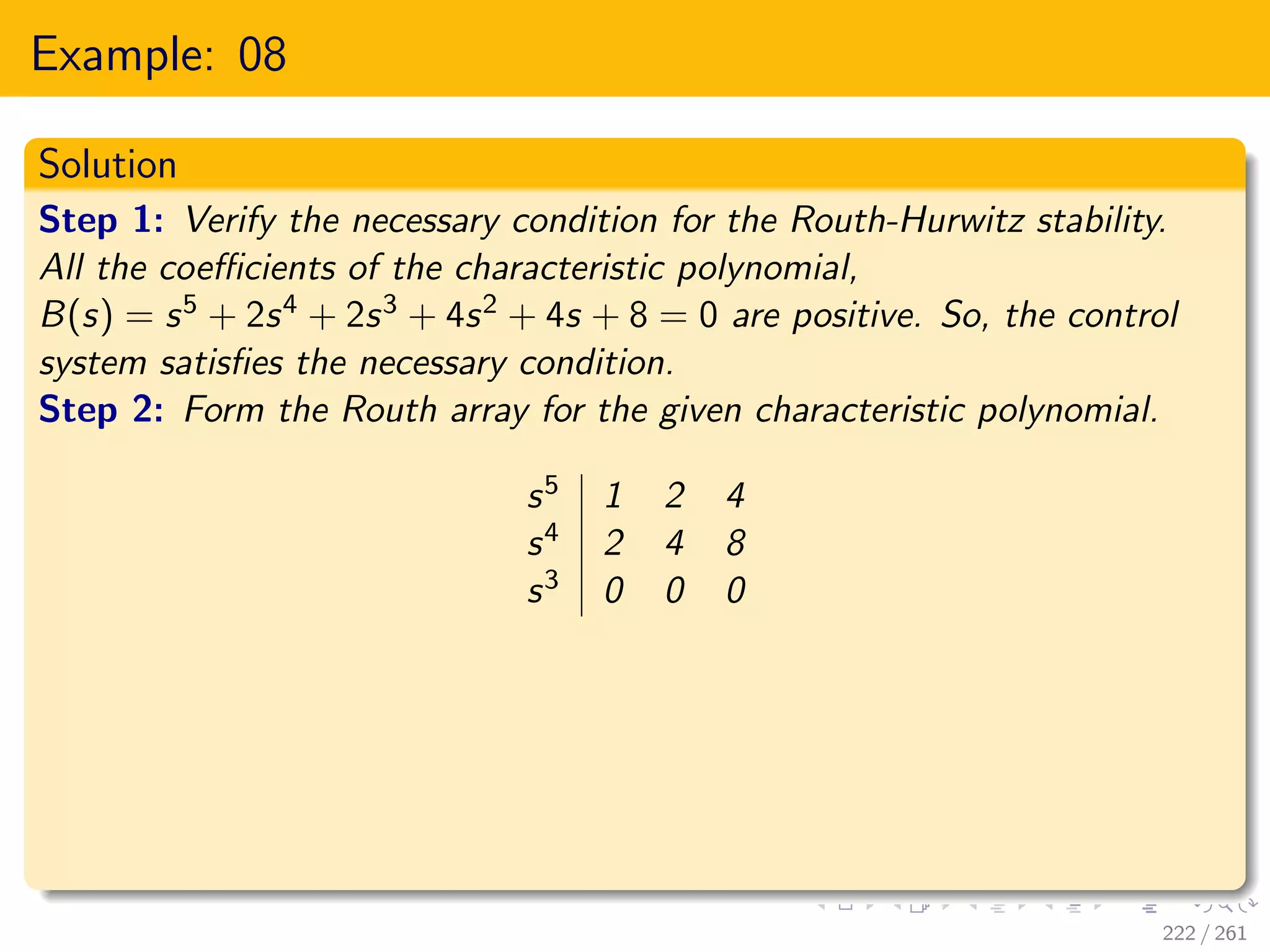
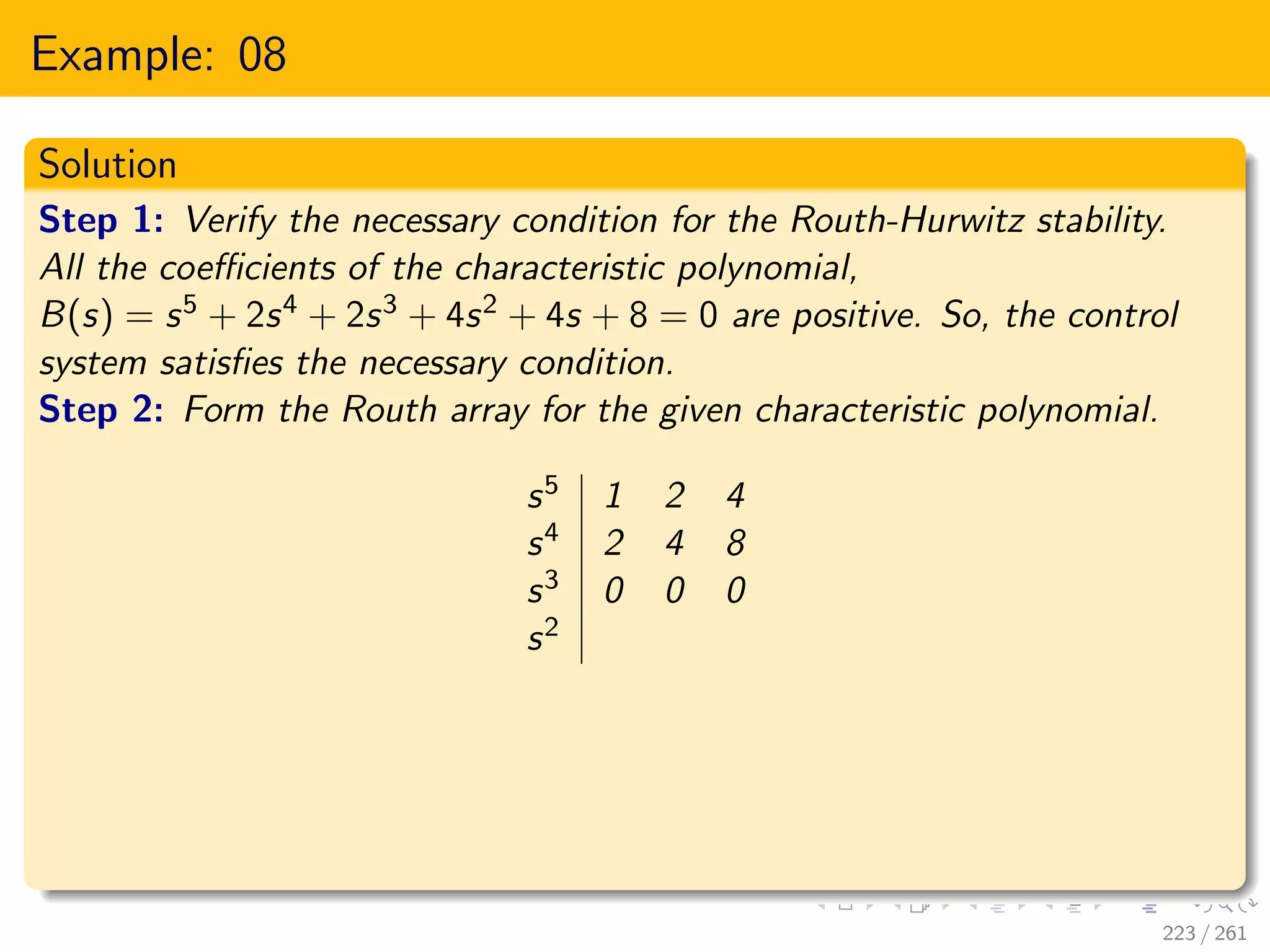
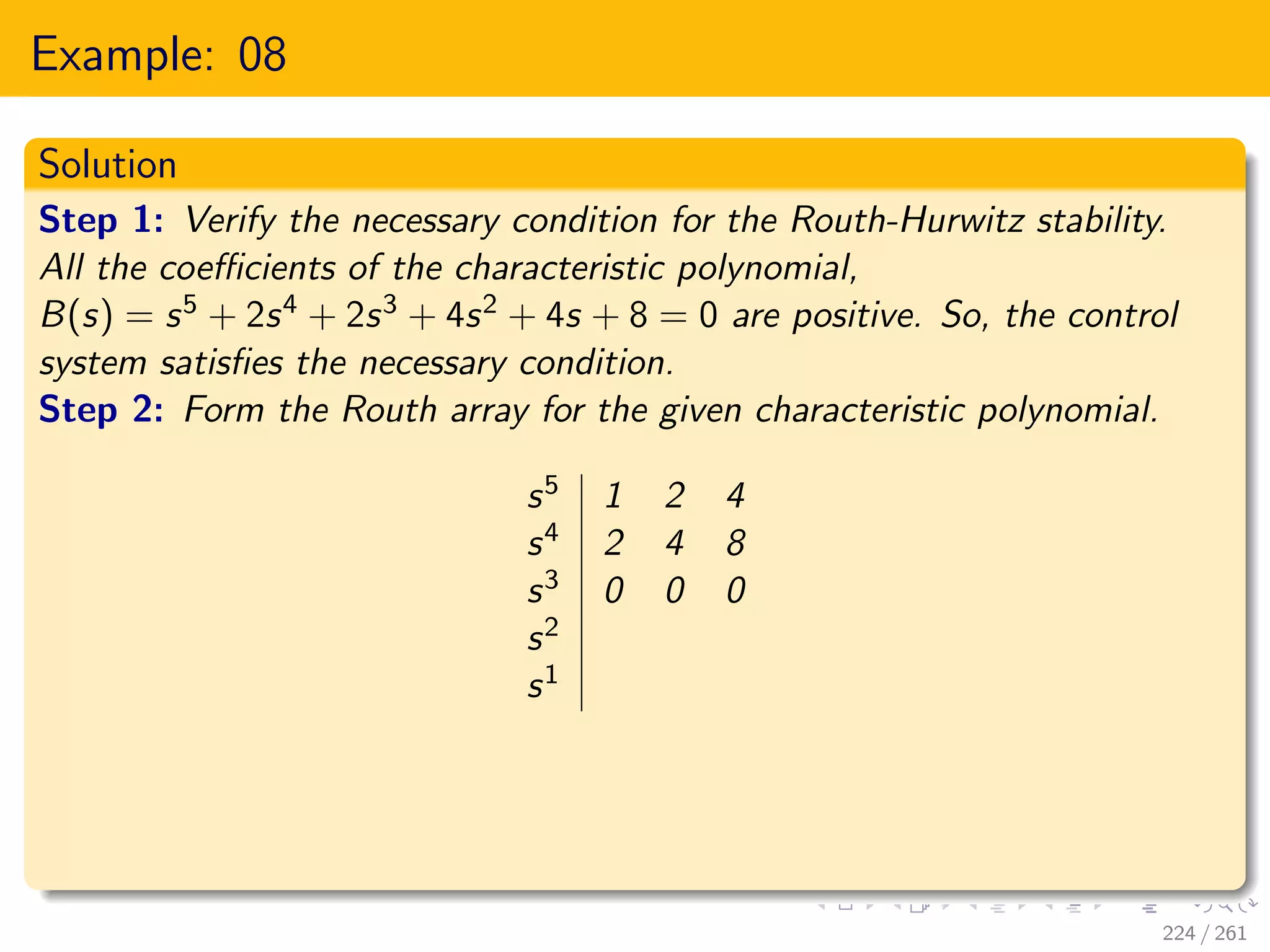
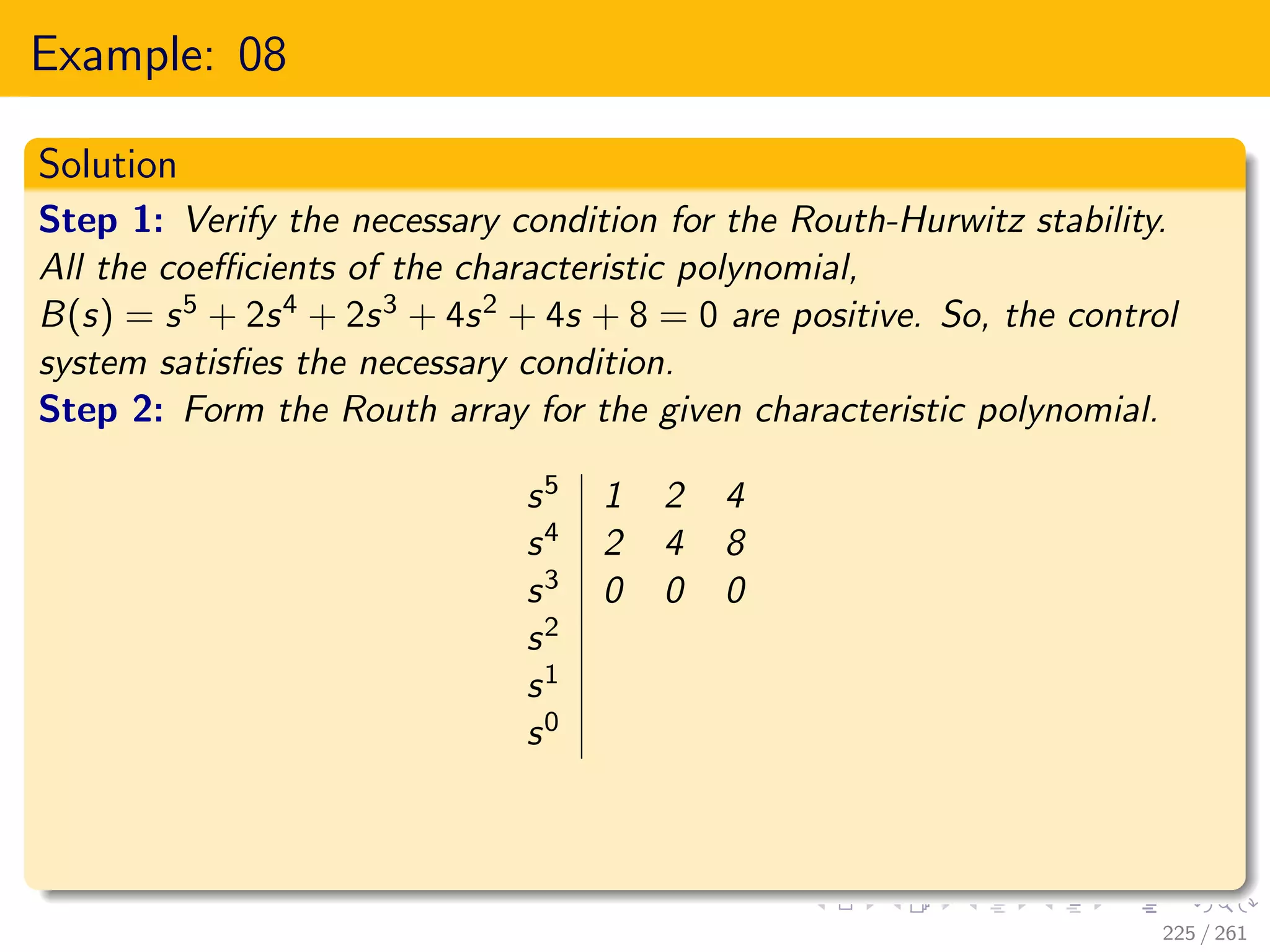
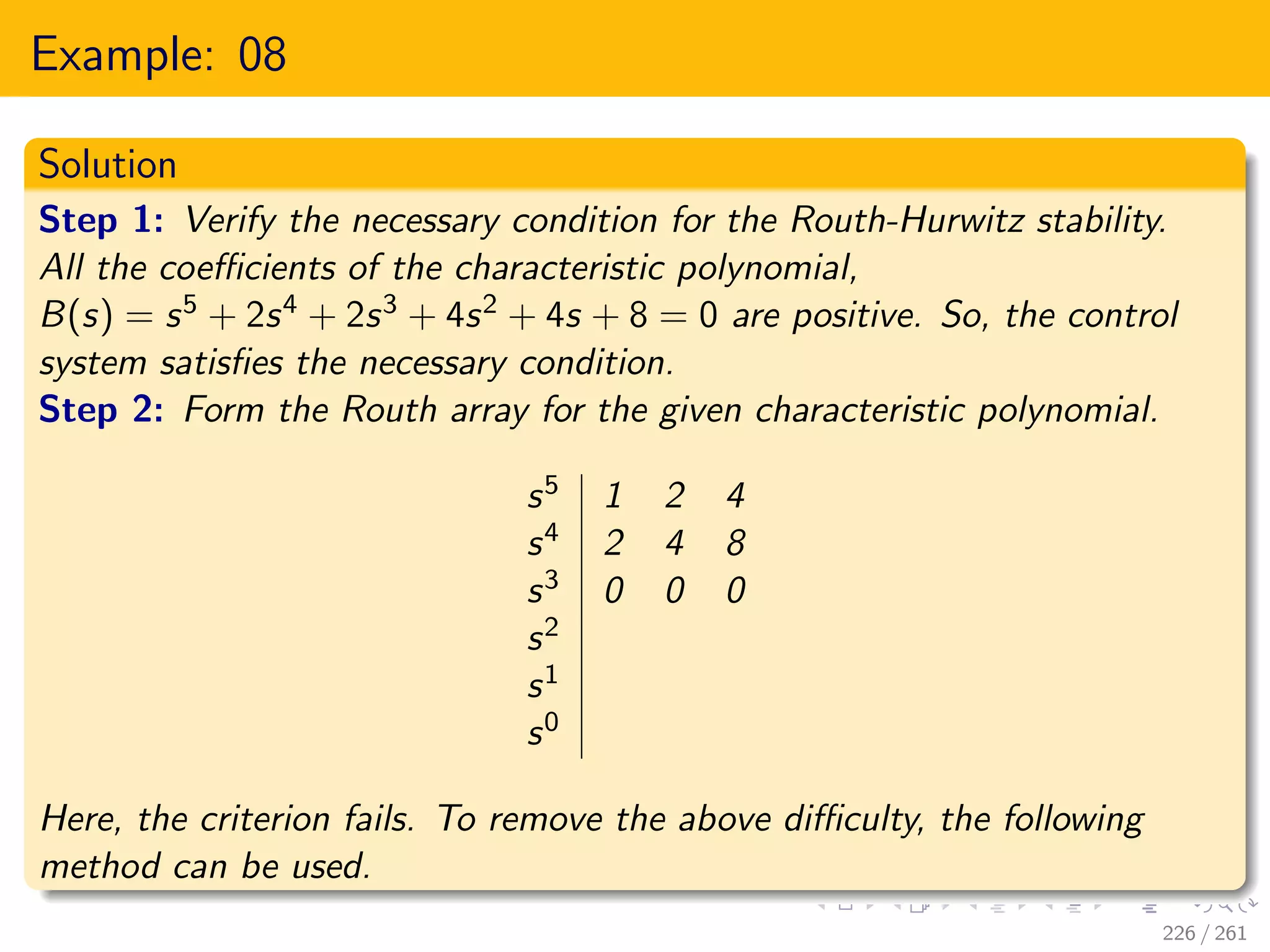
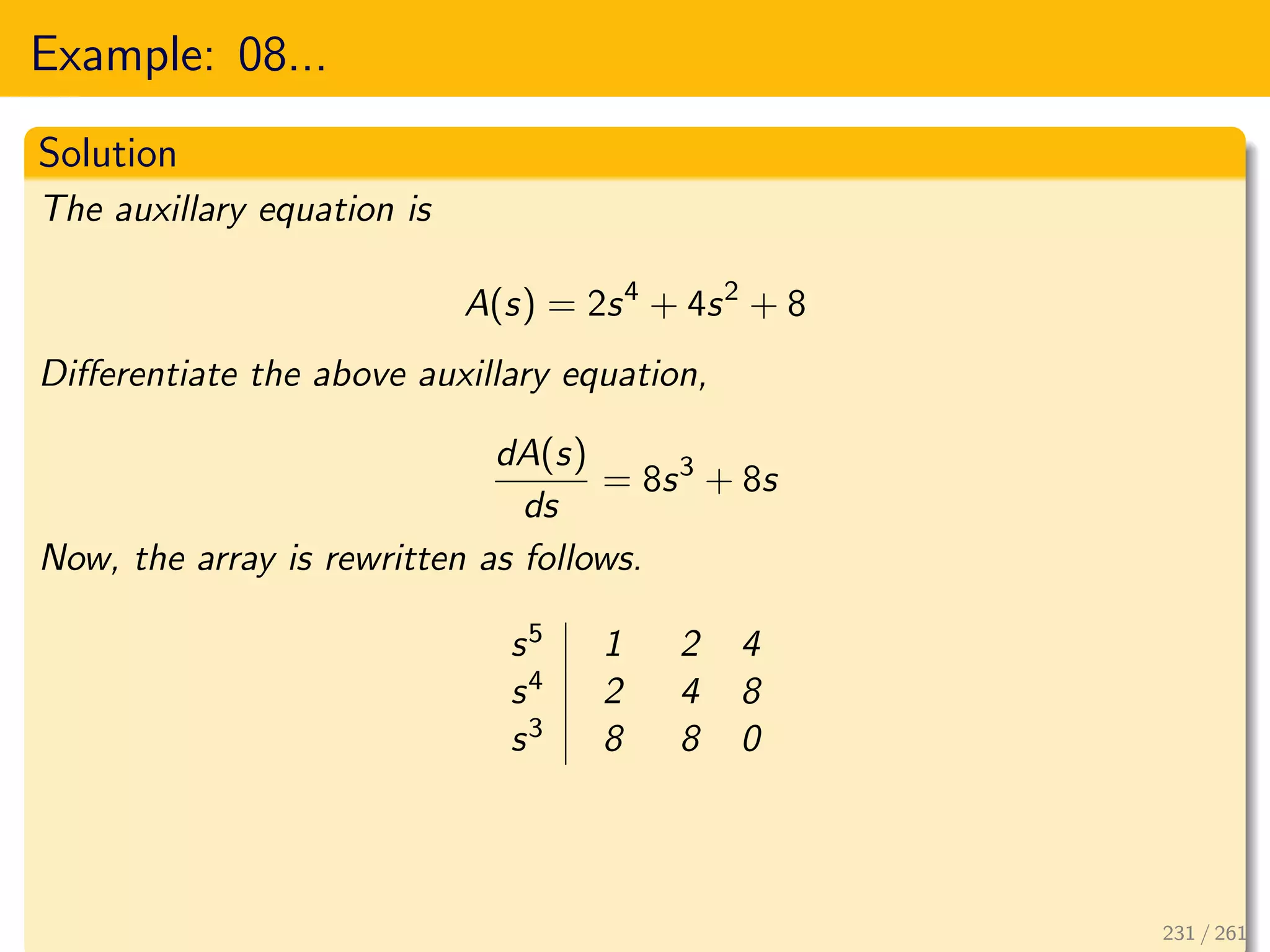
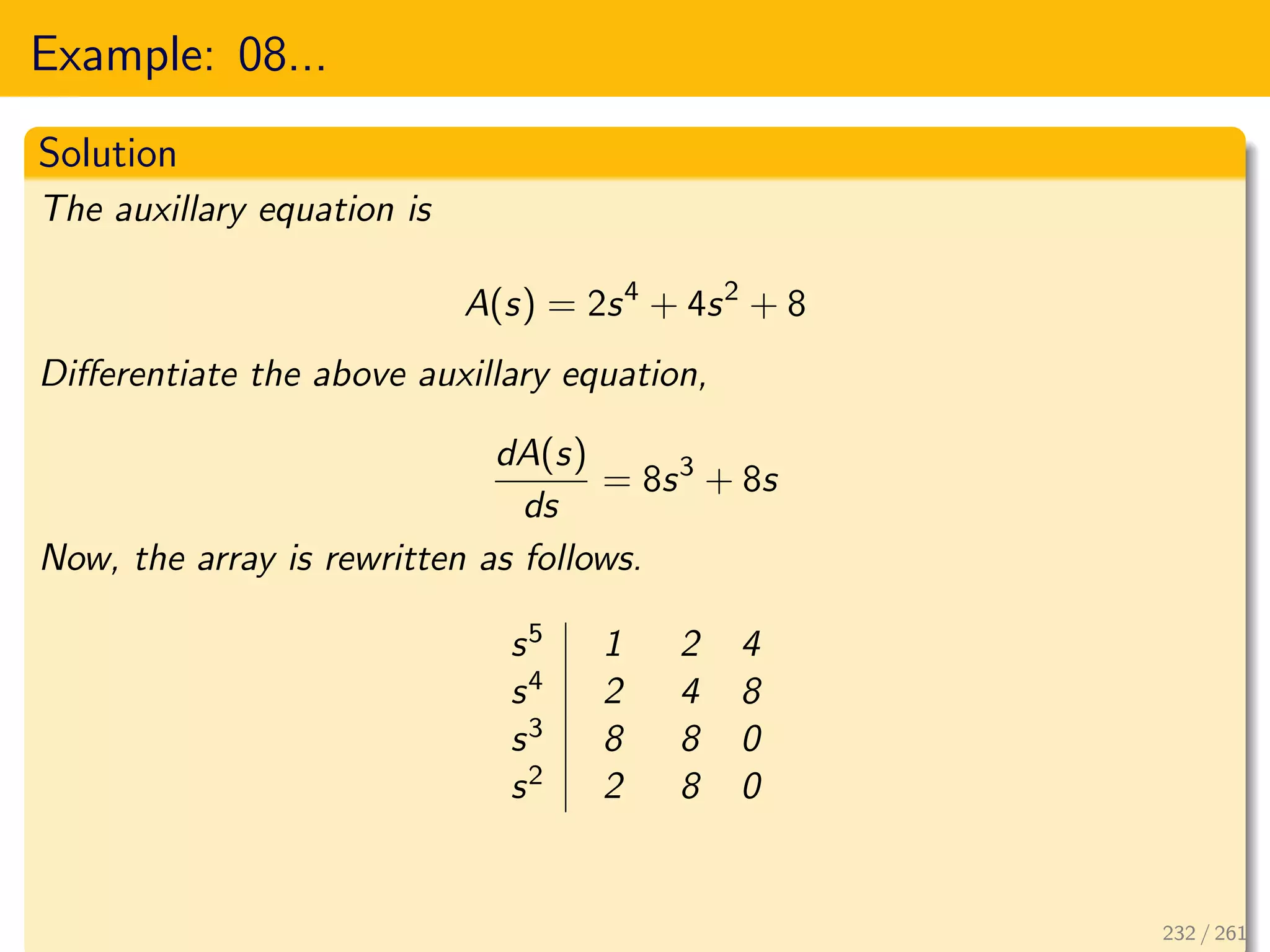
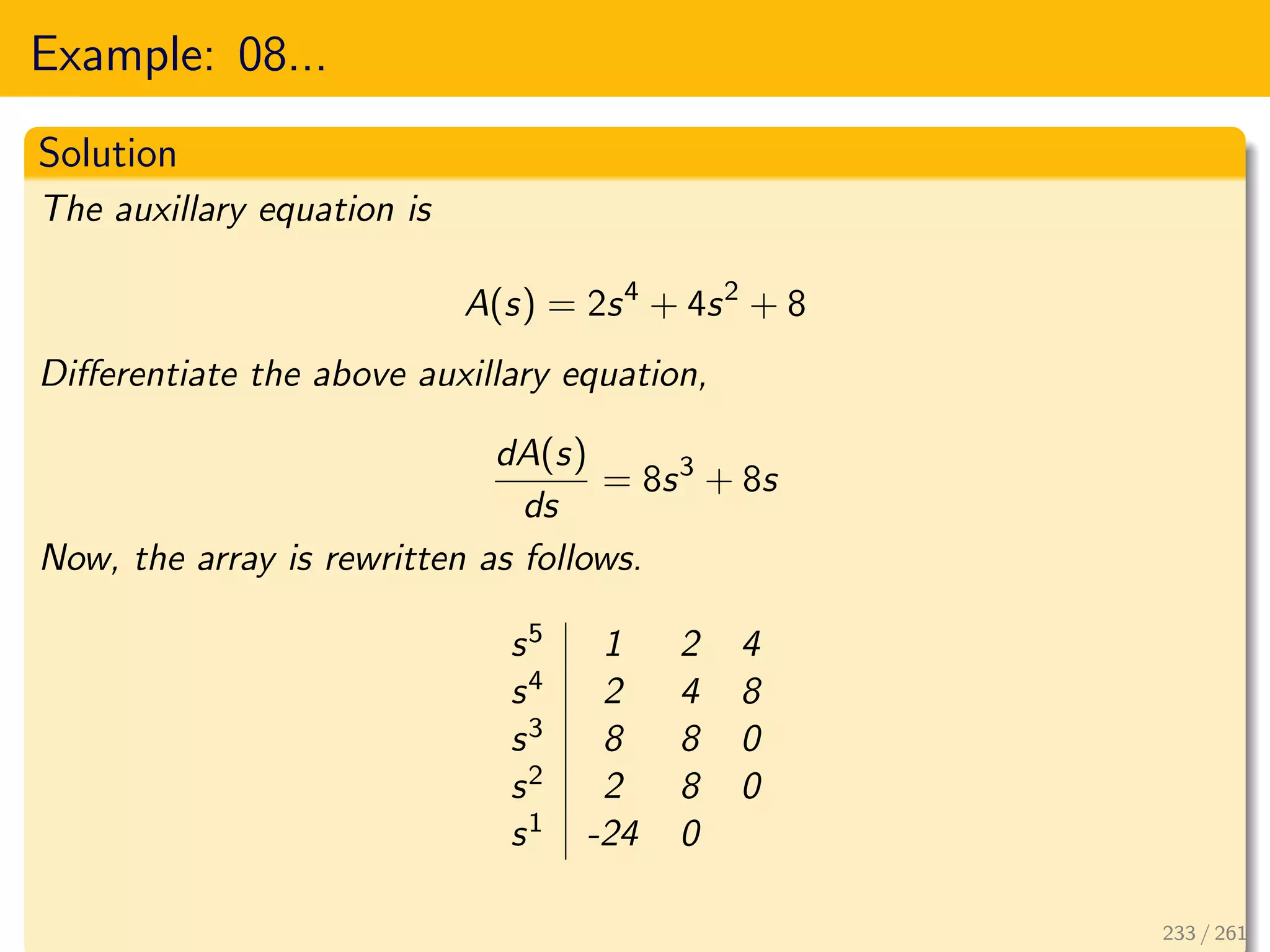
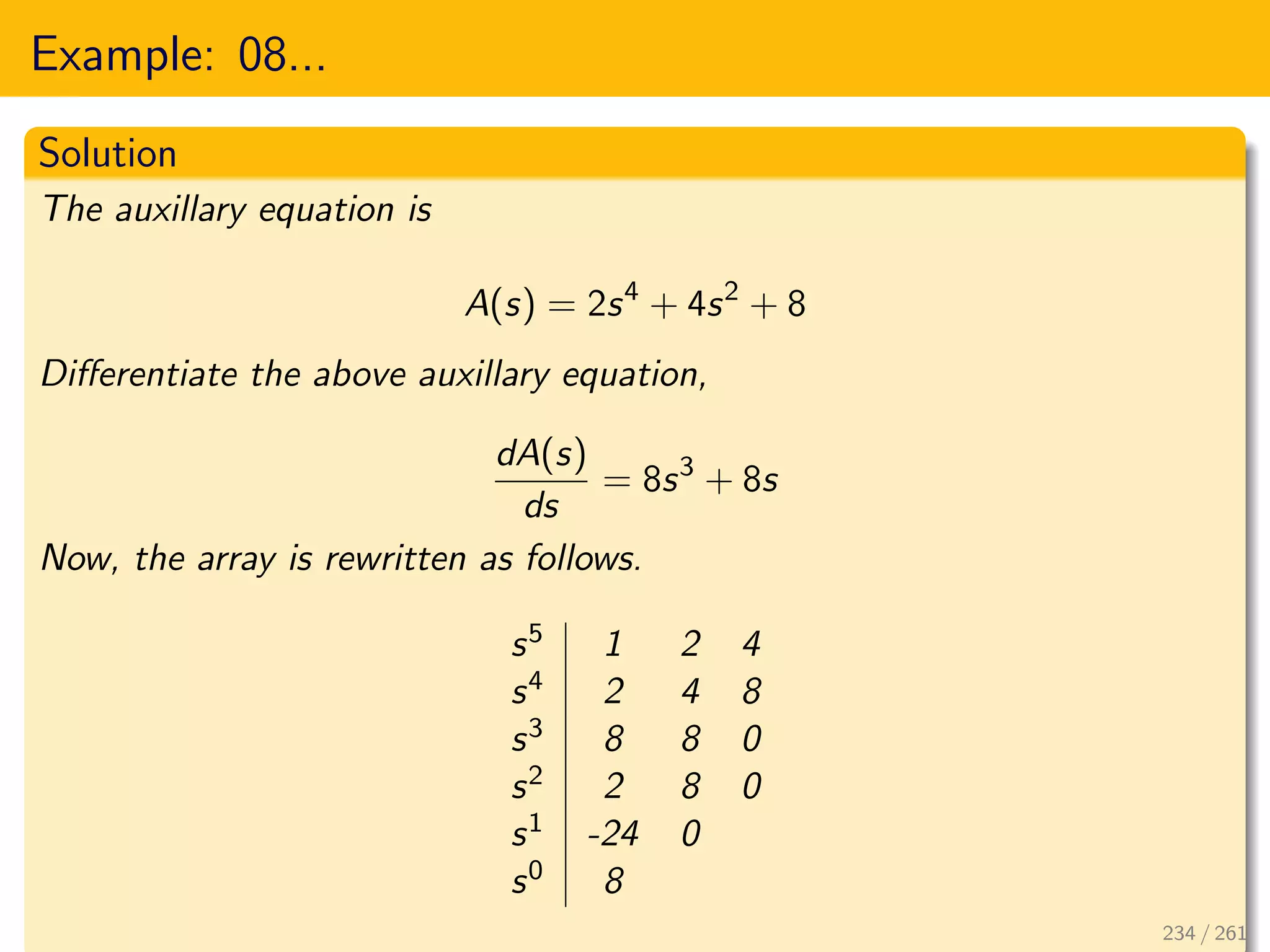
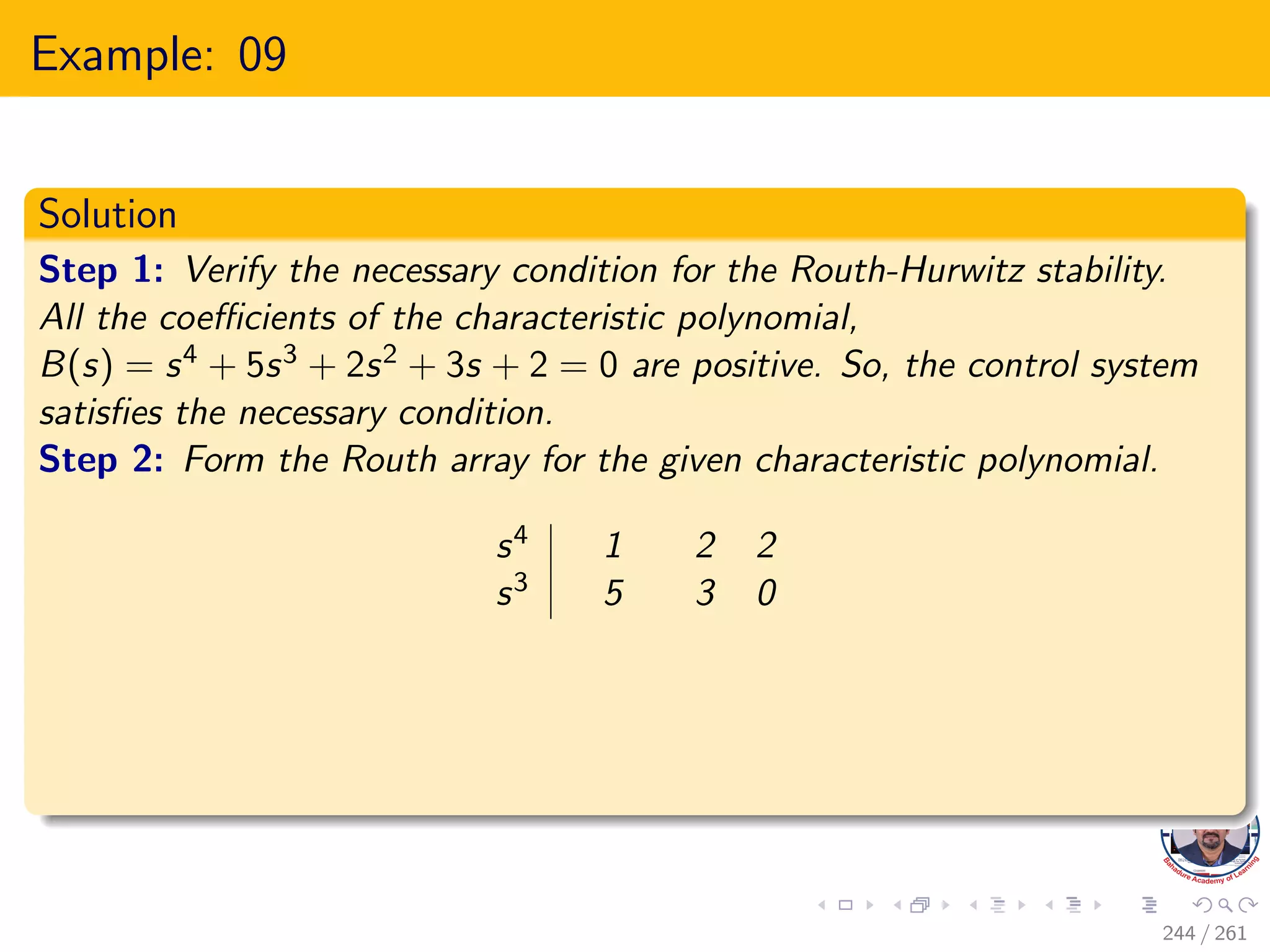
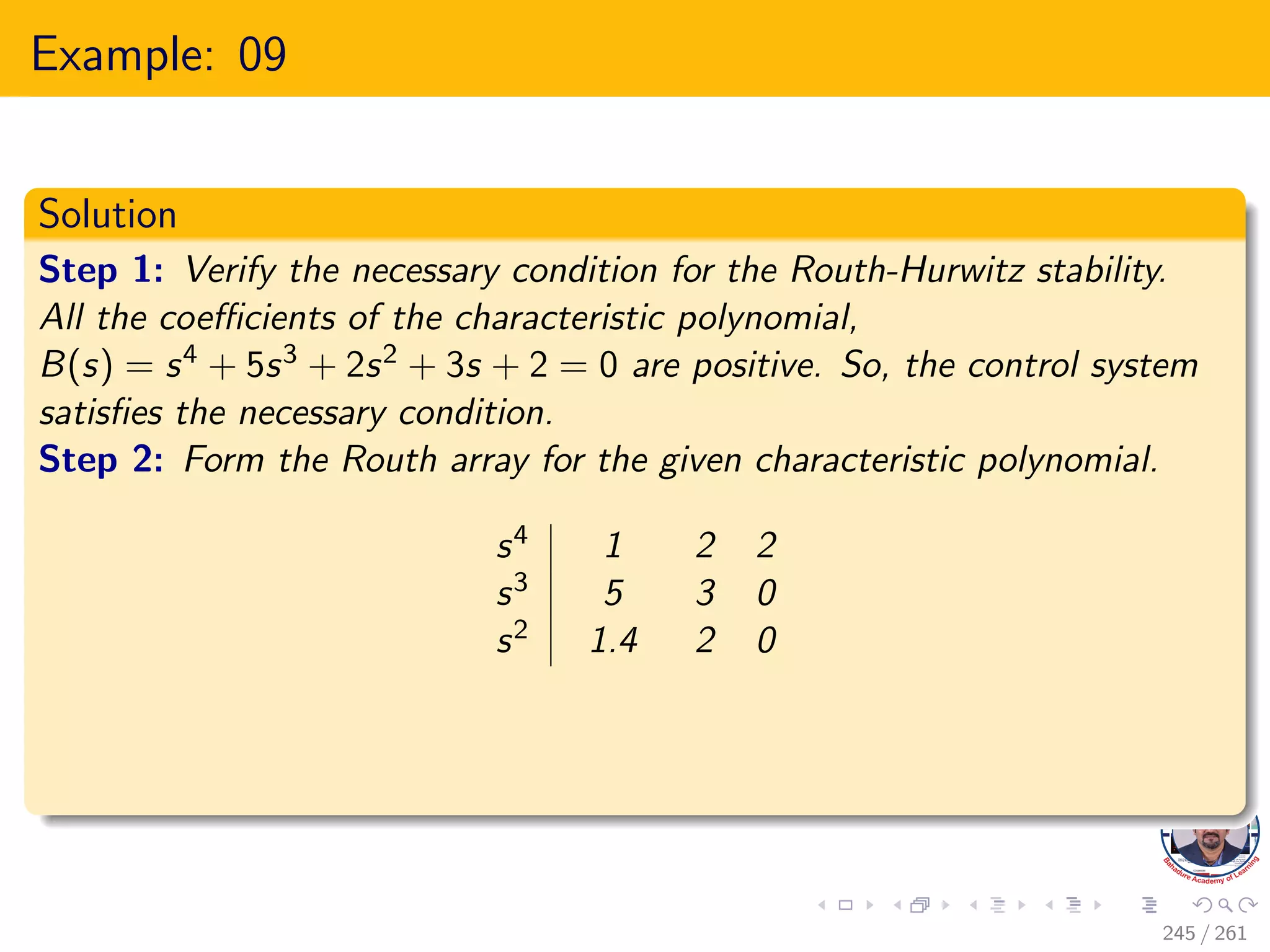
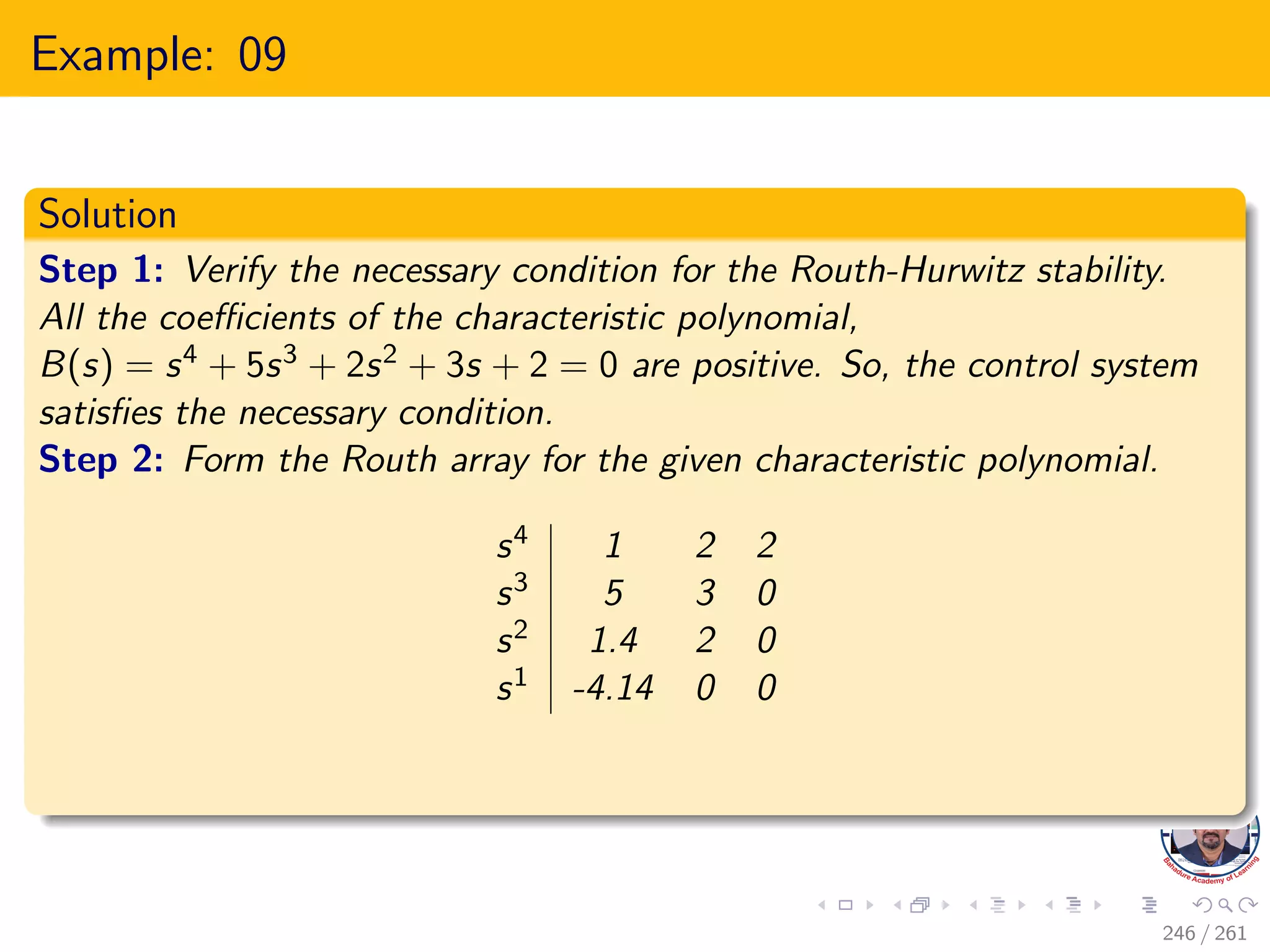
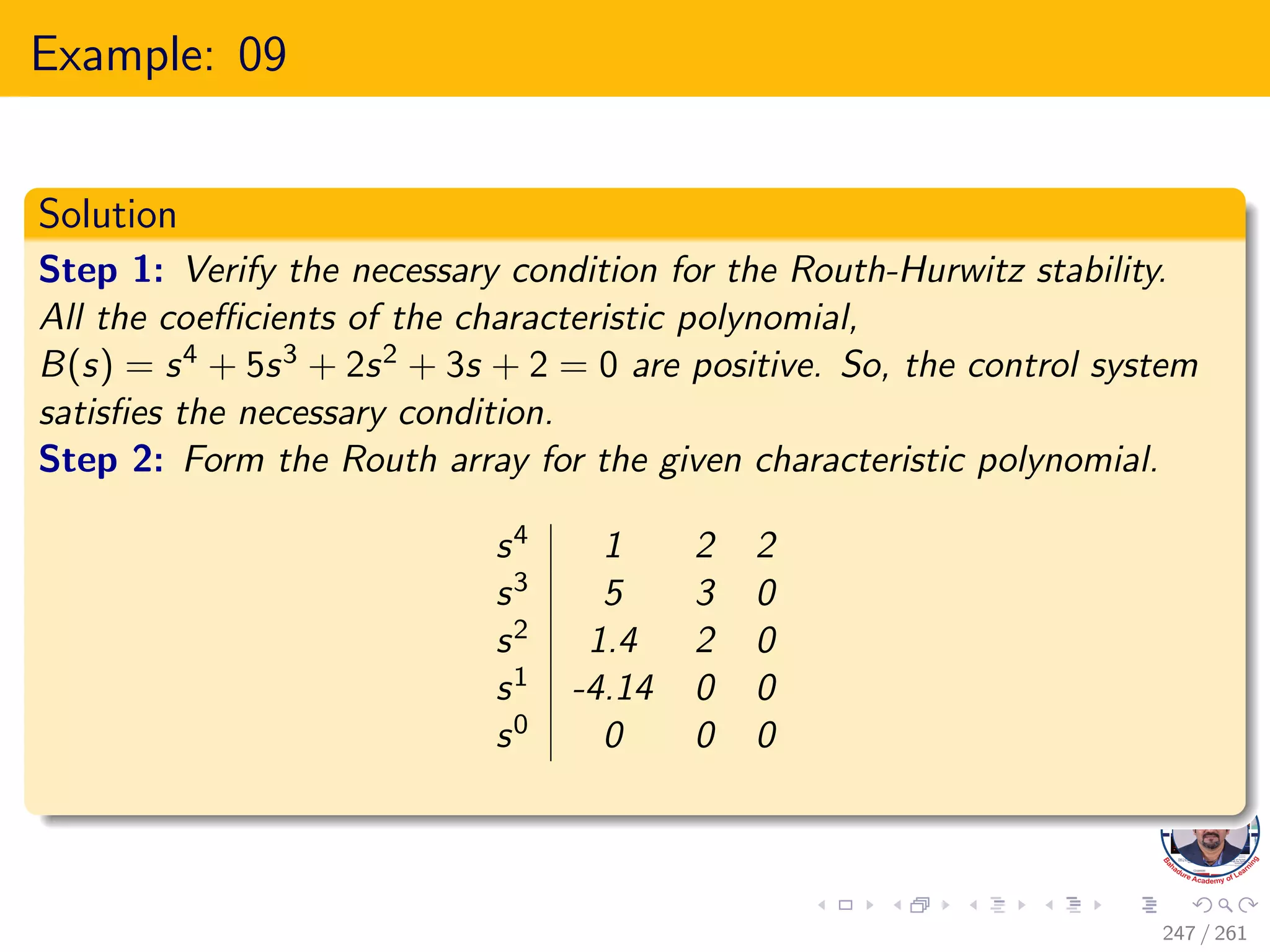

This document explores the stability of control systems, particularly focusing on the Routh-Hurwitz stability criterion, which determines the stability of linear time-invariant systems by analyzing the location of poles in the s-plane. It discusses various types of stability, including absolute, conditional, and marginal stability, and highlights the importance of having poles in specific regions to ensure a stable output. The document outlines the necessary and sufficient conditions for stability as part of the Routh-Hurwitz criterion, emphasizing the significance of coefficient signs and presence in the characteristic equation.