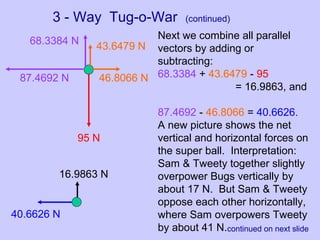
This document discusses vector concepts including:
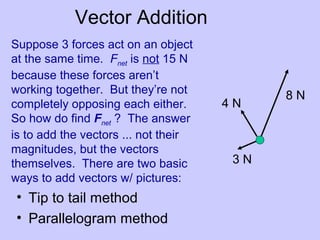
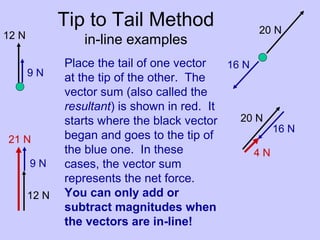
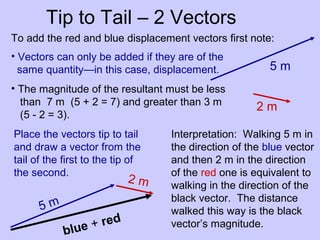
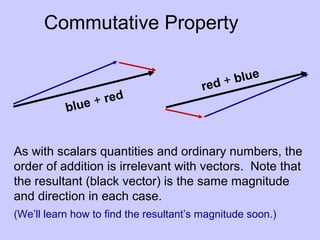
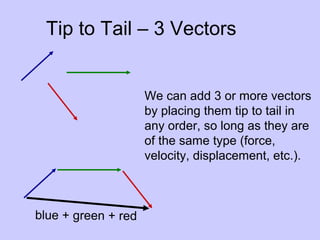
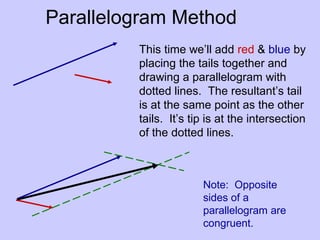
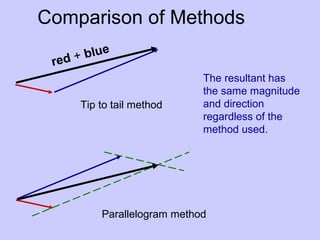
- Two methods for adding vectors graphically: the tip-to-tail method and parallelogram method.
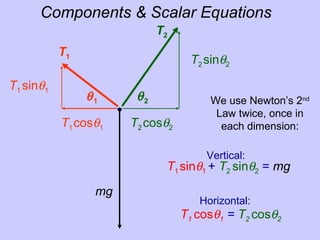
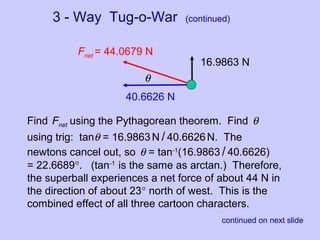
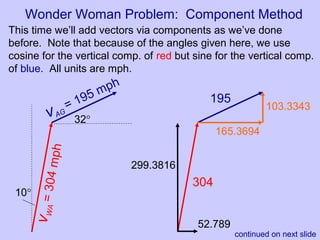
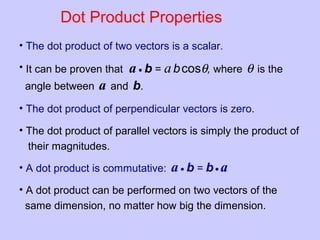
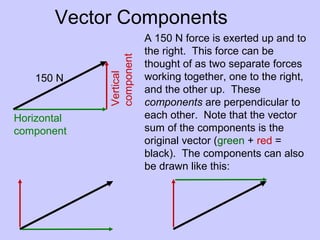
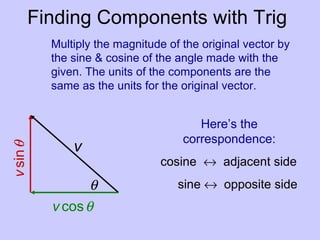
- Decomposing a vector into perpendicular components using trigonometric functions.
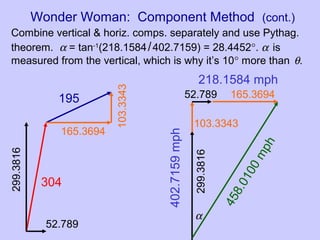
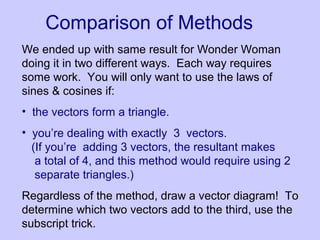
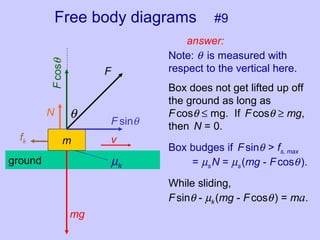
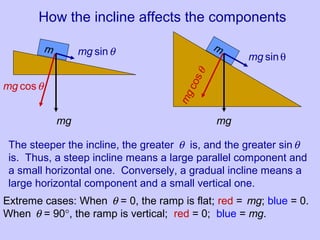
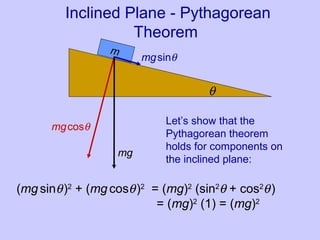
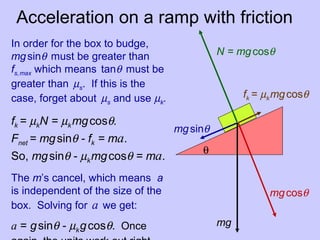
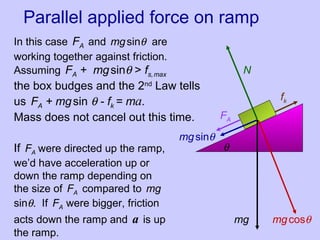
- Analyzing forces on an inclined plane by decomposing weight into components parallel and perpendicular to the plane.
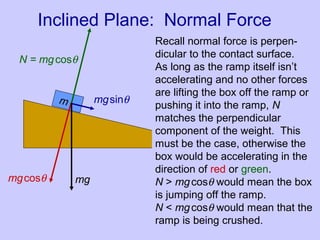
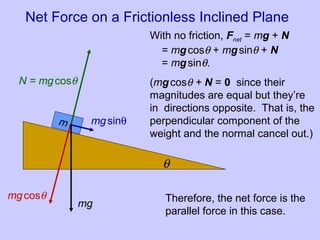
- The normal force on an object on an inclined plane equals the perpendicular component of the object's weight.

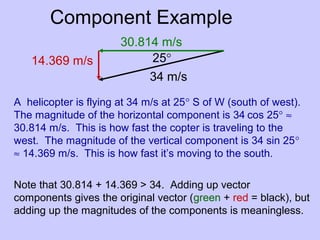
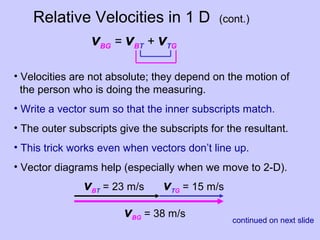
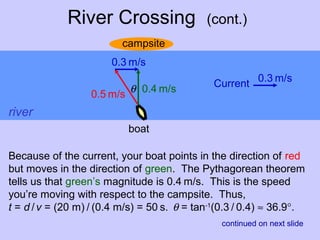
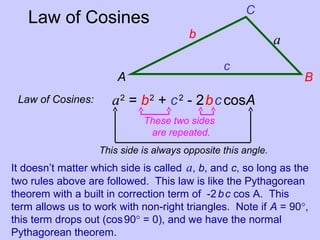
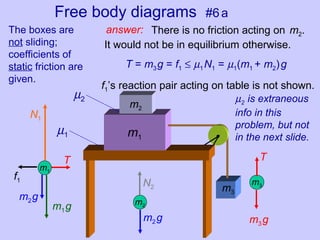
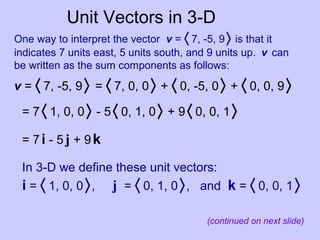
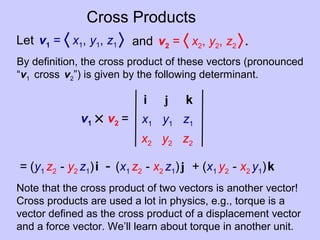
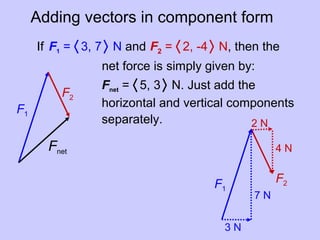
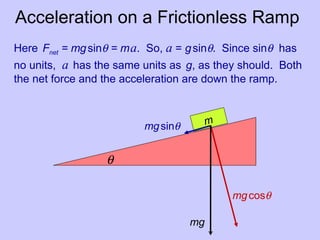
![Component Form
Instead of a magnitude and an angle, vectors are often
specified by listing their horizontal and vertical components.
For example, consider this acceleration vector:
53.13°
a
=
10
m
/s
2
3 m/s2
4m/s2
a = 10 m/s2
at 53.13° N of W
In component form:
a = 〈-3, 4〉 m/s2
Some books use parentheses rather
than angle brackets. The vector F =
〈2, -1, 3〉 N indicates a force that is a
combination of 2 N to the east, 1 N
south, and 3 N up. Its magnitude is
found w/ the Pythag. theorem:
F = [22
+ (-1)2
+ 32
]1/2
= 3.742 N](https://image.slidesharecdn.com/vectorschap6-160331005417/85/Vectors-chap6-19-320.jpg)
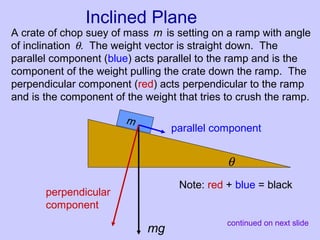
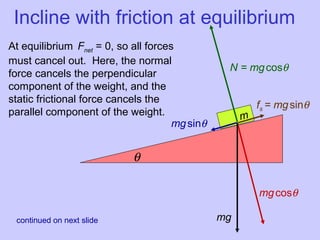
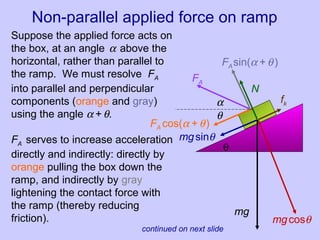
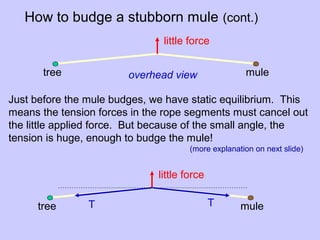
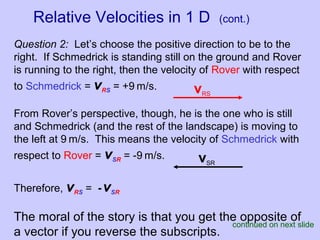
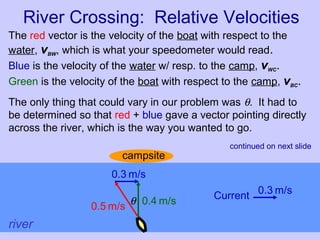
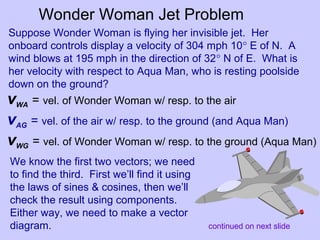
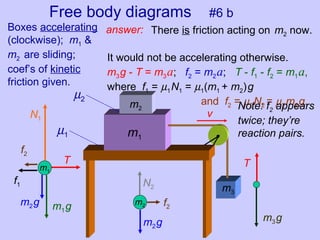
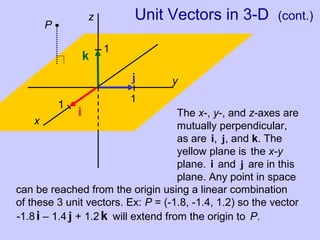
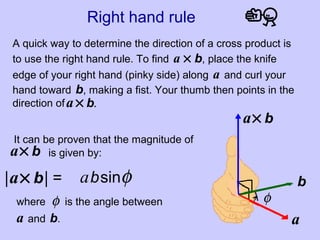
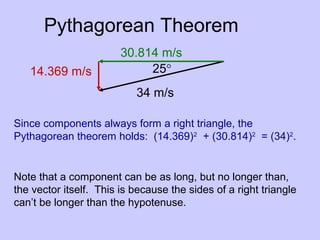
![Non-parallel applied force on ramp (cont.)
mg
mgcosθ
mgsinθ
fk
N
θ
FA
α
FA cos(α + θ)
FA sin (α + θ)
θ
Because of the perp. comp. of
FA, N < mgcosθ. Assuming
FA sin(α+θ) is not big enough
to lift the box off the ramp,
there is no acceleration in the
perpendicular direction. So,
FA sin(α + θ) + N = mgcosθ.
Remember, N is what a scale
would read if placed under the
box, and a scale reads less if a
force lifts up on the box. So,
N = mgcosθ - FA sin(α + θ),
which means fk = µk N
= µk [mgcosθ - FA sin(α + θ)].
continued on next slide](https://image.slidesharecdn.com/vectorschap6-160331005417/85/Vectors-chap6-36-320.jpg)
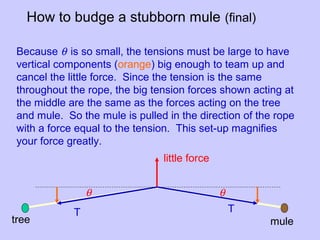
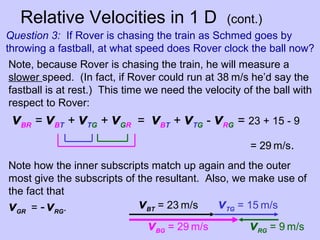
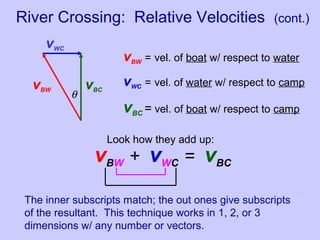
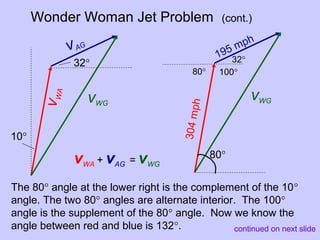
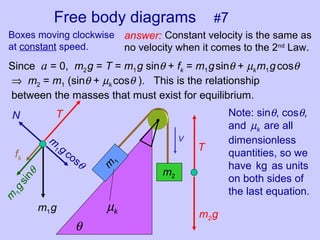
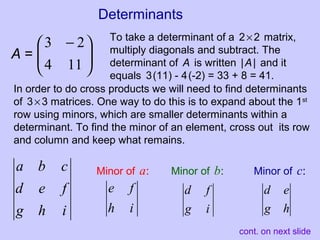
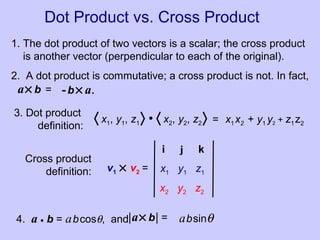
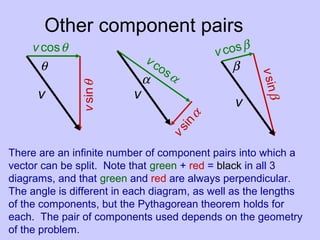
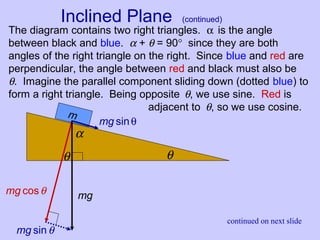
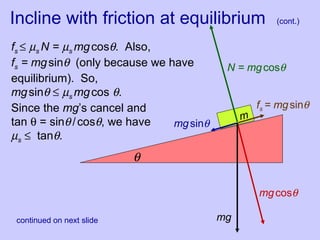
![Non-parallel applied force on ramp (cont.)
mg mgcosθ
mgsinθ
fk
N
θ
FA
α
FA cos(α + θ)
FAsin(α + θ)
θ
Assuming the combined force
of orange and blue is enough
to budge the box, we have
Fnet = orange + blue - brown = ma.
Substituting, we have
FA cos(α + θ) + mgsinθ
- µk [mgcosθ - FA sin(α + θ)] = ma.](https://image.slidesharecdn.com/vectorschap6-160331005417/85/Vectors-chap6-37-320.jpg)