Downloaded 225 times


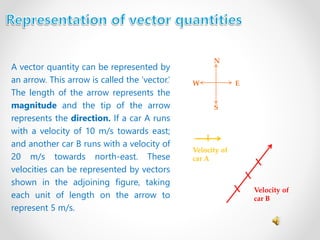
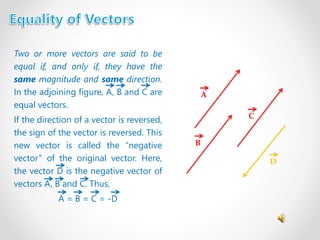
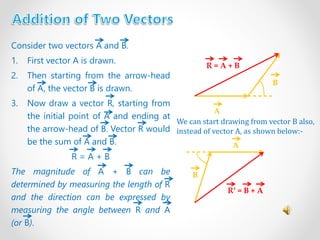
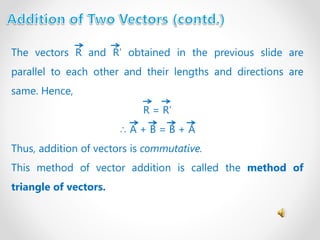
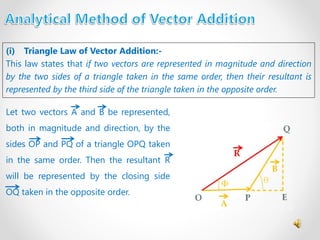
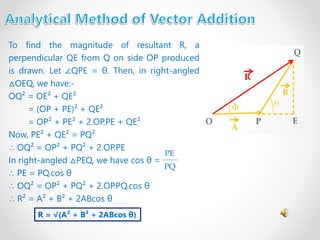
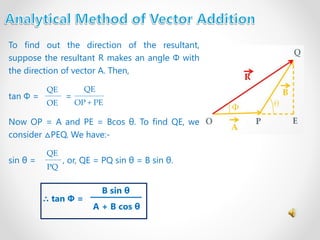
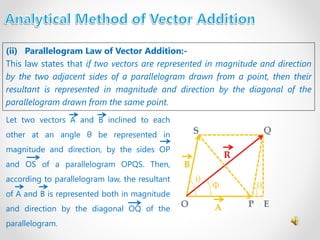
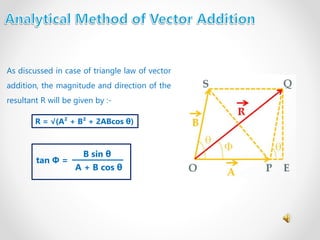
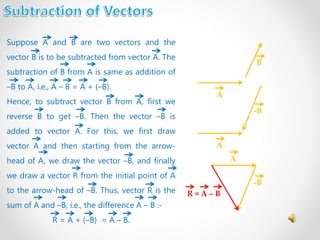










This document discusses scalar and vector quantities, defines vectors and their properties, and describes methods for vector addition and subtraction. It introduces concepts like the triangle law and parallelogram law of vector addition, multiplying vectors by scalars, position and displacement vectors, unit vectors, and resolving vectors into rectangular components. Key points covered include defining scalar/vector quantities, representing vectors with arrows, adding vectors using triangles/parallelograms, and properties like commutativity and associativity of vector addition.










































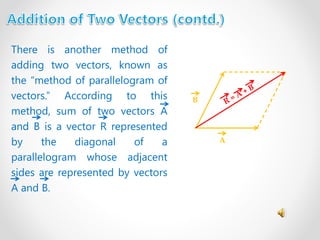
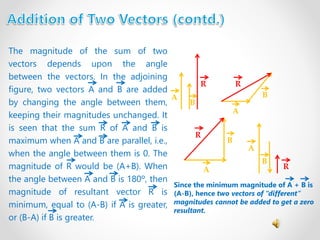
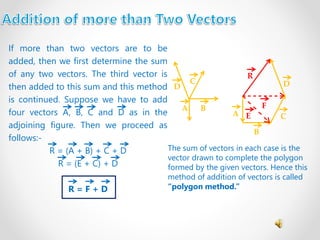
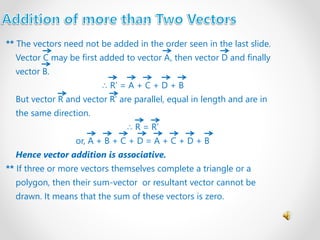
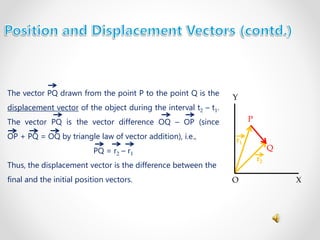
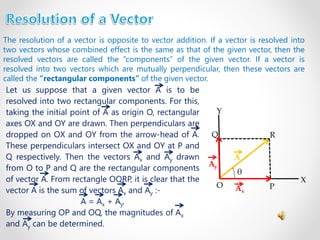
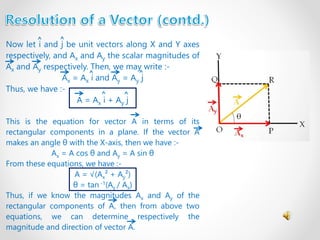
![Vector[1]](https://cdn.slidesharecdn.com/ss_thumbnails/vector1-120618011208-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
























