2
เวกเตอร
1. ลักษณะของเวกเตอร
ถาเรากําหนดจุด Aและ จุด B ในระนาบ และลากลูกศรเชื่อมจากจุด A ไปยังจุด B ดังภาพ
ถาเราตองการศึกษาทั้งทิศทางและขนาดของ AB สิ่งที่เราศึกษานี้ เรียกวา “เวกเตอร” เราใช
สัญลักษณ AB แทน เวกเตอร AB (หรือใชสัญลักษณ u แทนเวกเตอร AB ก็ได)
ขนาด (ความยาวของลูกศร)
เวกเตอร AB
ทิศทาง (ทิศทางของลูกศร)
2. เวกเตอรในระบบพิกัดฉาก
A
B
จุด A เรียกวา “จุดเริ่มตน”
จุด B เรียกวา “จุดสิ้นสุด”
เวกเตอร 1 หนวย คือ เวกเตอรที่มีความยาวหรือขนาดเทากับ 1 หนวย
เวกเตอร 1 หนวย เปนเวกเตอรสําคัญที่เรานําไปใชสรางเวกเตอรอื่น
3.
3
2.1 เวกเตอรในระบบพิกัดฉาก 2มิติ
ระบบพิกัดฉาก 2 มิติประกอบไปดวย แกน X และ แกน Y
แกน x แกนนอน
แกน y แกนตั้ง
ให i แทนเวกเตอร 1 หนวย ที่มีทิศทางไปตามแกน +X
และ j แทนเวกเตอร 1 หนวย ที่มีทิศทางไปตามแกน +Y
เราสามารถสรางเวกเตอรใดๆในระบบพิกัดฉาก 2 มิติ นี้ โดยใช เวกเตอร i และ เวกเตอร j เชน
2.1.1 เวกเตอรที่มีจุดเริ่มตนที่จุดกําเนิด และจุดสิ้นสุดที่ (a,b)
เมื่อ ,a b R∈
ตัดกันที่จุด (0,0)
Y
X
(0,0)
•
Y
X•
i
j
4.
4
เราสามารถเขียน เวกเตอร OAใหอยูในรูปของเวกเตอร i และ เวกเตอร j ไดดังนี้
OA OB BA
OA ai b j
= +
= +
บางครั้งเราใช สัญลักษณ
a
b
⎡ ⎤
⎢ ⎥
⎣ ⎦
แทนเวกเตอร ai b j+
a
OA ai b j
b
⎡ ⎤
= + = ⎢ ⎥
⎣ ⎦
ตัวอยาง เชน
1. ให O เปนจุดกําเนิด (0,0) และ A เปนจุด (3,4) และ B เปนจุด (-4,5) จงหา
OA และ OB
วิธีทํา
1) เวกเตอร 3 4OA i j= +
2) เวกเตอร 4 5OB i j= − +
2.1.2 เวกเตอรที่มีจุดเริ่มตนที่ไมใชจุดกําเนิด
คือมีจุดเริ่มตนที่ (a,b) และจุดสิ้นสุดที่ (c,d) ดังนี้
•
• ( , )a b(0, )b
( ,0)a(0,0)
A
B
•
ai
b j
Y
X
5.
5
เราสามารถเขียน เวกเตอร PQใหอยูในรูปของเวกเตอร i และ เวกเตอร j ไดดังนี้
( ) ( )
PQ PR RQ
PQ c a i d b j
= +
= − + −
( )
( ) ( )
( )
c a
PQ c a i d b j
d b
−⎡ ⎤
= − + − = ⎢ ⎥−⎣ ⎦
หลักการจํา
คา X (จุดปลาย-จุดตน)
PQ =
คา Y (จุดปลาย-จุดตน)
ตัวอยาง เชน
1. ให P(1,2) และ Q(-5,4) เปนจุดในระนาบ จงหา เวกเตอร PQ
วิธีทํา
คา X (จุดปลาย-จุดตน)
PQ =
คา Y (จุดปลาย-จุดตน)
•
Y
X
( , )c d
( ,0)a
Q
B
•
( )c a i−
( )d b j−
( , )c dQ
( , )a b
P•
6.
6
5 1
4 2
6
62
2
PQ
PQ i j
− −⎡ ⎤
= ⎢ ⎥−⎣ ⎦
−⎡ ⎤
= = − +⎢ ⎥
⎣ ⎦
2.2 เวกเตอรในระบบพิกัดฉาก 3 มิติ
ระบบพิกัดฉาก 3 มิติ ประกอบไปดวย แกน X , แกน Y และ แกน Z โดยแกนทั้ง 3 ตัดกันที่
จุด (0,0,0)
ให i แทนเวกเตอร 1 หนวย ที่มีทิศทางไปตามแกน +X
j แทนเวกเตอร 1 หนวย ที่มีทิศทางไปตามแกน +Y
และ k แทนเวกเตอร 1 หนวย ที่มีทิศทางไปตามแกน +Z ดังรูป
Z
Y
X
(0,0,0)
•
Z
Y
X
j
•i
k
7.
7
ถาเรากําหนดจุดเริ่มตนของ เวกเตอร PQคือ จุด P = (a,b,c)
และกําหนดจุดสิ้นสุดของ เวกเตอร PQ คือ จุด Q = (d,e,f)
เราสามารถเขียน เวกเตอร PQ ใหอยูในรูปของเวกเตอร ,i j และ k ไดดังนี้
( )
( ) ( ) ( ) ( )
( )
d a
PQ e b d a i e b j f c k
f c
−⎡ ⎤
⎢ ⎥= − = − + − + −⎢ ⎥
⎢ ⎥−⎣ ⎦
หลักการจํา
คา X (จุดปลาย-จุดตน)
PQ =
คา Y (จุดปลาย-จุดตน)
คา Z (จุดปลาย-จุดตน)
ตัวอยาง เชน
1. ให O เปนจุดกําเนิด (0,0,0) , จุด P คือ (1,2,3) และ จุด Q คือ (-1,-2,-3)
ในระบบพิกัดฉาก 3 มิติ จงหาเวกเตอร PQ
วิธีทํา
คา X (จุดปลาย-จุดตน)
PQ =
คา Y (จุดปลาย-จุดตน)
คา Z (จุดปลาย-จุดตน)
8.
8
1 1
2 2
33
2
4 2 4 6
6
PQ
PQ i j k
− −⎡ ⎤
⎢ ⎥= − −⎢ ⎥
⎢ ⎥− −⎣ ⎦
−⎡ ⎤
⎢ ⎥= − = − − −⎢ ⎥
⎢ ⎥−⎣ ⎦
3. การเทากันของเวกเตอร
ขนาดเทากัน
เวกเตอร 2 เวกเตอรจะเทากัน เมื่อ
ทิศทางเดียวกัน
ในระบบพิกัดฉาก 2 มิติ
ให u ai b j= + และ v ci d j= + ,
u v
a c
b d
=
⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
ก็ตอเมื่อ
,a c
b d
=
=
ในระบบพิกัดฉาก 3 มิติ
ให u ai b j ck= + + และ v di e j f k= + + ,
u v
a d
b e
c f
=
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
ก็ตอเมื่อ
,
,
a d
b e
c f
=
=
=
ตัวอยาง เชน
1. จงหาคา x,y และ z ซึ่งทําให 3 2 4xi j k i y j zk+ + = + −
วิธีทํา
9.
9
3 2 4
4
3
2
xij k i y j zk
x
y
z
+ + = + −
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
4, 3, 2x y z∴ = = = −
อธิบาย การเทากันของเวกเตอร 2 เวกเตอร โดยรูปภาพ ไดดังนี้ เชน
(3,3) v (6,3)
(5,5)
(3,4)
(2,1)
4. นิเสธของเวกเตอร
ให u เปนเวกเตอรในระบบพิกัดฉาก นิเสธของ u เขียนแทนดวยสัญลักษณ u− โดยมี
ความหมายดังนี้
x=4
y=3
-z=2 z=-2
•
(3,0)(0,0) u
Y
X
•
จากรูป
3u i= และ
(6 3) (3 3)
3
v i j
v i
u v
= − + −
=
∴ =
(0,0)
Y
X•
•
u
v
จากรูป
2u i j= + และ
(5 3) (5 4)
2
v i j
v i j
u v
= − + −
= +
∴ =
10.
10
ในระบบพิกัดฉาก 2 มิติในระบบพิกัดฉาก 3 มิติ
ให ( )
u ai b j
u ai b j
u ai b j
= +
− = − +
− = − −
ให ( )
u ai b j ck
u ai b j ck
u ai b j ck
= + +
− = − + +
− = − − −
ตัวอยาง เชน
1. ให 3 4u i j= − จงหา u−
วิธีทํา
3 4
(3 4 )
3 4
u i j
u i j
u i j
= −
− = − −
∴− = − +
2. ให 3 2u i j k= − + จงหา u−
วิธีทํา
3 2
(3 2 )
3 2
u i j k
u i j k
u i j k
= − +
− = − − +
∴− = − + −
5. การบวกและการลบเวกเตอร
เราสามารถอธิบายการ บวก เวกเตอร 2 เวกเตอร ดวยแผนภาพดังตอไปนี้
เราสามารถอธิบายการ ลบ เวกเตอร 2 เวกเตอร ดวยแผนภาพดังตอไปนี้
u
v
u v+
11.
11
5.1 การบวกเวกเตอร
ระบบพิกัดฉาก 2มิติ
ถากําหนดให u ai b j= + และ v ci d j= + เราสามารถหาเวกเตอร
( ) ( )
a c a c
u v a c i b d j
b d b d
+⎡ ⎤ ⎡ ⎤ ⎡ ⎤
+ = + = = + + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦ ⎣ ⎦
ระบบพิกัดฉาก 3 มิติ
ถากําหนดให u ai b j ck= + + และ v di e j f k= + + เราสามารถหาเวกเตอร
( ) ( ) ( )
a d a d
u v b e b e a d i b e j c f k
c f c f
+⎡ ⎤ ⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ = + = + = + + + + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦ ⎣ ⎦
5.2 การลบเวกเตอร
ระบบพิกัดฉาก 2 มิติ
ถากําหนดให u ai b j= + และ v ci d j= + เราสามารถหาเวกเตอร
( ) ( )
( ) ( )
a c a c
u v a c i b d j
b d b d
c a c a
v u c a i d b j
d b d b
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤
− = − = = − + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤
− = − = = − + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
ระบบพิกัดฉาก 3 มิติ
ถากําหนดให u ai b j ck= + + และ v di e j f k= + + เราสามารถหาเวกเตอร
u
v
u v−
u
v
v u−
12.
12
( ) () ( )
( ) ( ) ( )
a d a d
u v b e b e a d i b e j c f k
c f c f
d a d a
v u e b e b d a i e b j f c k
f c f c
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥− = − = − = − + − + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥ ⎢ ⎥− = − = − = − + − + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
ขอสังเกต
1) ( )u v u v− = + −
2) ( )v u v u− = + −
ตัวอยาง เชน
1. ถา 5 3u i j= + และ 2v i j= + จงหา ,u v u v+ − และ v u−
วิธีทํา
5 2 5 2 7
7 4
3 1 3 1 4
5 2 5 2 3
3 2
3 1 3 1 2
2 5 2 5 3
3 2
1 3 1 3 2
u v i j
u v i j
v u i j
+⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤
+ = + = = = +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤
− = − = = = +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
− −⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤
− = − = = = − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
u
v
v−
u v−
( )u v+ −
เทากัน
14
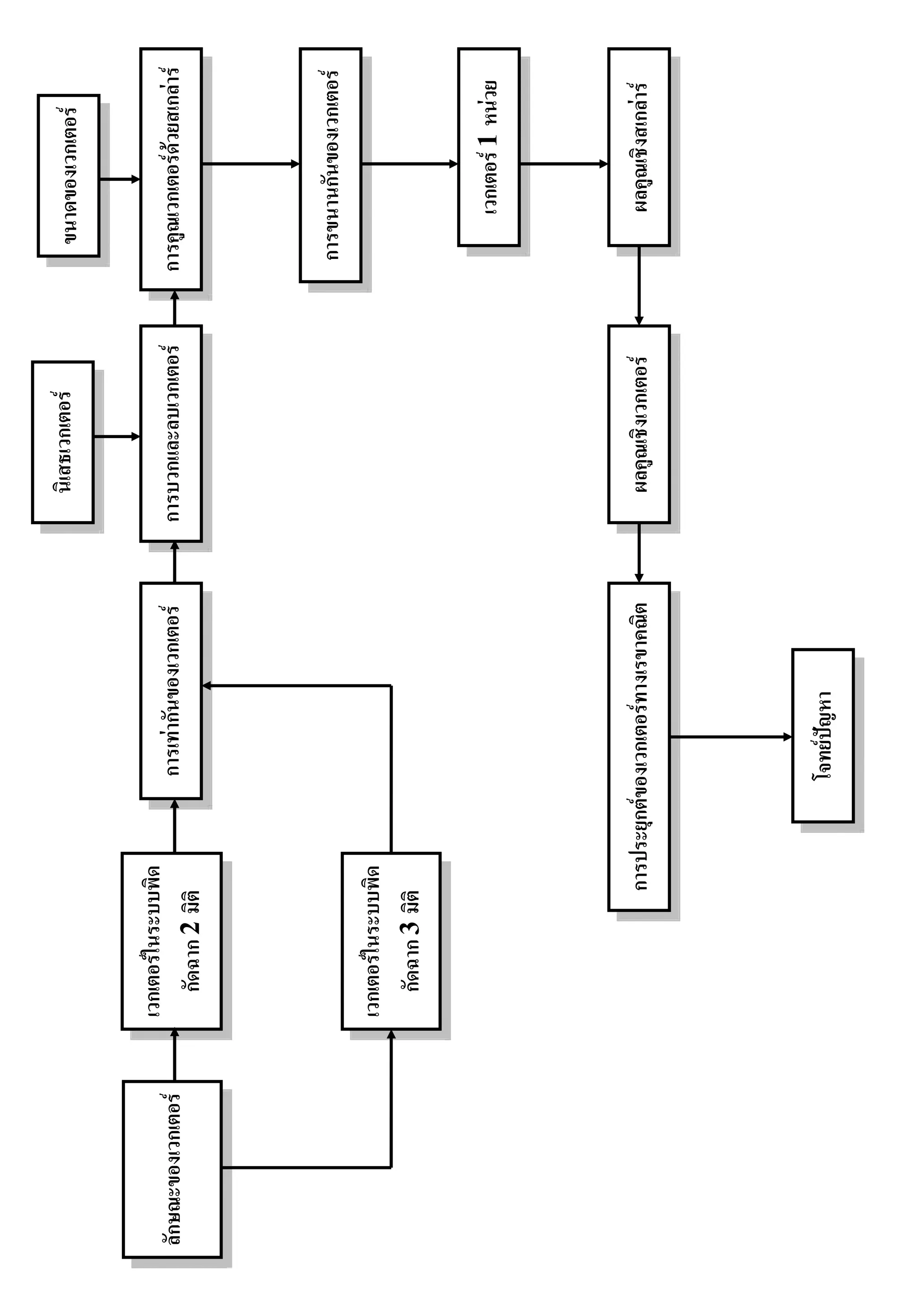
2) จากโจทย
4
4 35 3
5
AB i j k
⎡ ⎤
⎢ ⎥= − + = −⎢ ⎥
⎢ ⎥⎣ ⎦
2 4
1 3
3 5
a
b
c
−⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥∴ − = −⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
จะได……… 2 4..............(1)a − =
1 3..............(2)
3 5................(3)
b
c
− = −
− =
3) จุด B = (6,-2,8)
4. จากรูป จงหาวา ?FE =
วิธีทํา
( )
FE FA AB BC CD DE
FE e a b c d
FE a b c d e
= + + + +
= − + + + +
∴ = + + + −
5. ในรูป ABC ถา AD เปนเสนมัธยฐาน BA a= และ BD b= จงหา
CA
วิธีทํา
แกสมการได
6
2
8
a
b
c
=
= −
=
e
a
b
c
d
A
B C
D
E
F
15.
15
( )
[( )( )]
( 2 )
2
CA CB BA
CA CD DB BA
CA b b a
CA b a
CA a b
= +
= + +
= − + − +
= − +
∴ = −
6. ขนาดของเวกเตอร
ขนาดของเวกเตอรใดๆ คือ ความยาวของลูกศรของเวกเตอรนั้นๆ
เราใชสัญลักษณ u แทน ขนาดของเวกเตอร u
ในระบบพิกัดฉาก 2 มิติ ในระบบพิกัดฉาก 3 มิติ
ถา 2 2
u ai b j
u a b
= +
= +
ถา 2 2 2
u ai b j ck
u a b c
= + +
= + +
ตัวอยาง เชน
1. กําหนดให 3 4u i j= + จงหา u
วิธีทํา
2 2
3 4
3 4
9 16
25
5
u i j
u
u
u
u
= +
= +
= +
=
∴ =
2. กําหนดให 2 3u i j k= + + จงหา u
วิธีทํา
16.
16
2 2 2
23
1 2 3
1 4 9
14
u i j k
u
u
u
= + +
= + +
= + +
∴ =
7. การคูณเวกเตอรดวยสเกลาร
ให k R∈
ในระบบพิกัดฉาก 2 มิติ ในระบบพิกัดฉาก 3 มิติ
ถา ( )
u ai b j
ku k ai b j
ku kai kb j
= +
= +
= +
ถา ( )
u ai b j ck
ku k ai b j ck
ku kai kb j kck
= + +
= + +
= + +
อธิบายโดยใชแผนภาพ ไดดังนี้
ถา
2 2
2 2
k ku u
k ku u
= ⇒ =
= − ⇒ = −
เวกเตอร 2u คือ เวกเตอรที่มีทิศทางเดียวกับ u และมีขนาดเปน 2 เทาของเวกเตอร u
เวกเตอร 2u− คือ เวกเตอรที่มีทิศตรงขามกับ u และมีขนาดเปน 2 เทาของเวกเตอร u
ถา , 0k R k∈ >
เวกเตอร ku คือ เวกเตอรที่มีทิศทางเดียวกับ u และมีขนาดเปน k เทาของเวกเตอร u
ถา , 0k R k∈ <
เวกเตอร ku คือ เวกเตอรที่มีทิศตรงขามกับ u และมีขนาดเปน k เทาของเวกเตอร u
••
u
2u2u−
17.
17
ตัวอยาง เชน
1. ให2 3u i j k= − + จงหา 3u และ
1
2
u
วิธีทํา
1) หา 3u
2 3
3 3(2 3 )
3 (3)(2) (3)(3) (3)(1)
3 6 9 3
u i j k
u i j k
u i j k
u i j k
= − +
= − +
= − +
∴ = − +
2) หา
1
2
u
2 3
1 1
(2 3 )
2 2
1 1 1 1
( )(2) ( )(3) ( )(1)
2 2 2 2
1 3 1
2 2 2
u i j k
u i j k
u i j k
u i j k
= − +
= − +
= − +
∴ = − +
2. กําหนดให A(2,5) และ B(-1,4) จงหา 5AB
วิธีทํา
1) หาเวกเตอร AB
1 2 3
3
4 5 1
AB i j
− − −⎡ ⎤ ⎡ ⎤
= = = − −⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦
2) หาเวกเตอร 5AB
5 5( 3 )
5 15 5 )
AB i j
AB i j
= − −
= − −
3) หา 5AB
18.
18
2 2
5 (15) ( 5)
5 225 25 250 5 10
AB
AB
= − + −
= + = =
สมบัติของการคูณเวกเตอรดวยสเกลาร
ถา ,u v เปนเวกเตอรใดๆ และ ,a b R∈
1) ( )a b u au bv± = ±
2) ( )a u v au av± = ±
3)
( ) ( ) ( )
( ) ( )
a bu b au ab u
bu bu
= =
− = −
4) ถา 0au = แลว 0a = หรือ 0u =
8. การขนานกันของเวกเตอร
เวกเตอร 2 เวกเตอร จะขนานกัน ก็ตอเมื่อ เวกเตอรทั้ง 2 มี ทิศทางเดียวกัน หรือ ทิศตรงขามกัน
เวกเตอร u ขนานกับ v เราใชสัญลักษณ u v ก็ตอเมื่อ เราสามารถเขียน
v ku
u kv
=
=
, เมื่อ
k R∈ และ , 0u v ≠
u v u v
1 2
u v
19.
19
ตัวอยาง เชน
1. ให4 2 3u i j k= + − และ 8 6 6v i j k= + − จงตรวจสอบวา u v
หรือไม
วิธีทํา
1) เลือกเขียน……………. v ku=
8 6 6 (4 3 3 )
8 6 6 4 3 3
4 8....................(1)
3 6....................(2)
i j k k i j k
i j k ki k j kk
k
k
+ − = + −
+ − = + −
=
=
2) หาคา k ที่ทําให v ku= ได คือ k=2
u v∴
2. จงหาคา x ที่ทําใหเวกเตอร 2
x⎡ ⎤
⎢ ⎥
⎣ ⎦
กับ
4
3
⎡ ⎤
⎢ ⎥−⎣ ⎦
ขนานกัน
วิธีทํา
1) เลือกเขียน
4
2 3
x
k
⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
4
2 3
4 ..........(1)
2 3 ........(2)
x k
k
x k
k
⎡ ⎤ ⎡ ⎤
=⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦
=
= −
นํา
2
3
k
−
= แทนคาใน (1) แลวหาคา x
2 8
4( )
3 3
x
− −
= =
2k =
2
3
k
−
=
20.
20
แบบฝกหัด
1. กําหนดจุดบนระนาบ O(0,0), A(1,3) , B(6,7) และ C(5,-2) จงพิจารณาขอ
ใดตอไปนี้ถูกตอง
1.1) 3OA i j= +
1.2) 6 7BO i j= +
1.3) 5 4AC i j= − +
1.4) 9CB i j= +
21.
21
1.5) 41AB =
1.6)10 8AB BA i j+ = +
1.7) 4 5AB BC i j+ = −
1.8) 7 10OA OB i j+ = +
22.
22
1.9) OA ABBO i j+ + = −
2. ให ABCD เปนรูปสี่เหลี่ยมดานขนาน มีเสนทแยงมุมตัดกันที่จุด E ดังรูป จงหาเวกเตอร
ที่เทากับเวกเตอรที่กําหนดใหตอไปนี้
2.1) AB , BC , AE
2.2) ED , BC− , AE−
A
B C
D
E
23.
23
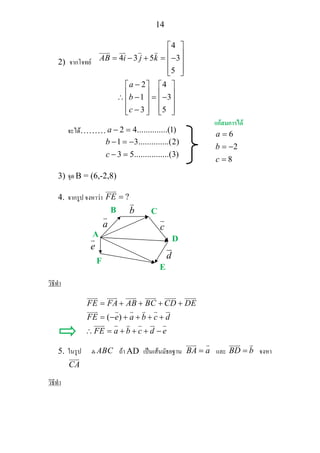
3. จงเขียนเวกเตอร PQใหอยูในรูปผลบวก ลบ ของเวกเตอร a , b หรือ c
3.1)
3.2)
3.3)
P
Q
a
b
a
b
c
P
Q
P
Q
a
b
33
9.เวกเตอร 1 หนวย
เวกเตอร1 หนวย คือ เวกเตอรใดๆที่มีขนาดของเวกเตอรเทากับ 1 หนวย
เวกเตอร 1 หนวย ที่มีทิศเดียวกับ u คือ
u
u
ตัวอยาง เชน
1. จงหาเวกเตอร 1 หนวยที่มีทิศเดียวกับ 3 4u i j= +
วิธีทํา
เวกเตอร 1 หนวย ที่มีทิศเดียวกับ u
u
u
=
2 2
3 4
3 4
3 4
5
3 4
5 5
i j
i j
i j
+
=
+
+
=
= +
2. จงหาเวกเตอร 1 หนวยที่มีทิศเดียวกับ 4 4 2u i j k= + −
วิธีทํา
34.
34
2 2 2
44 2
4 4 ( 2)
4 4 2
6
4 4 2
6 6 6
2 2 1
3 3 3
u i j k
u
i j k
i j k
i j k
+ −
=
+ + −
+ −
=
= + −
= + −
3. กําหนดให 2 3u i j= − และ 3 4v i j= + จงหาเวกเตอรที่มีทิศเดียวกับ u
แตมีขนาดเทากับ v
วิธีทํา
1) หาเวกเตอร 1 หนวย ที่มีทิศเดียวกับ u
2 2
2 3
2 ( 3)
2 3
13
2 3
13 13
u i j
u
i j
i j
−
=
+ −
−
=
= −
2) หา v
2 2
3 4 25 5v = + = =
3) หาเวกเตอรที่มีทิศเดียวกับ u แตมีขนาดเทากับ v
เวกเตอรที่มีทิศเดียวกับ u แตมีขนาดเทากับ v
u
v
u
=
35.
35
2 3
(5)
13 13
1015
13 13
i j
i j
⎛ ⎞
= −⎜ ⎟
⎝ ⎠
= −
4. ให ,u v และ w เปนเวกเตอรที่ไมขนานกัน จงหาเวกเตอรที่มีทิศทางเดียวกับ
u w+ และมีขนาดเทากับ v
วิธีทํา
1) หาเวกเตอร 1 หนวย ที่มีทิศทางเดียวกับ u w+ คือ
u w
u w
+
+
2) หาเวกเตอรที่มีทิศทางเดียวกับ u w+ และขนาดเทากับ v คือ
(เวกเตอร 1 หนวย ที่มีทิศทางเดียวกับ u w+ )(ขนาดของเวกเตอร u )
u w
v
u w
+
+
5. ให 6 3 2u i j k= − + − ถา v มีทิศตรงขามกับ u และ
1
2
v = แลวจง
หา v
วิธีทํา
1) หานิเสธของเวกเตอร u u= −
( 6 3 2 )
6 3 2
i j k
i j k
= − − + −
= − +
2) เวกเตอร 1 หนวยที่มีทิศทางเดียวกับ เวกเตอร ( )u− คือ
36.
36
2 2 2
() 6 3 2
6 ( 3) 2
6 3 2
49
6 3 2
7 7 7
u i j k
u
i j k
i j k
− − +
=
− + − +
− +
=
= − +
2) หาเวกเตอร v
( )
1 6 3 2
2 7 7 7
3 3 1
7 14 7
u
v v
u
i j k
i j k
−
=
−
⎛ ⎞⎛ ⎞
= − +⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
= − +
10.ผลคูณเชิงสเกลาร
ให ,u v เปนเวกเตอรใดๆ ผลคูณเชิงสเกลารของ u และ v เขียนแทนดวยสัญลักษณ
u v⋅ โดยมีวิธีการหาคาดังนี้
ระบบพิกัดฉาก 2 มิติ
ถา ,
a c
u ai b j v ci d j
b d
⎡ ⎤ ⎡ ⎤
= = + = = +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
แลว
( )
a c
u v ai b j ci d j ac bd
b d
⎡ ⎤ ⎡ ⎤
⋅ = = + )( + = +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
37.
37
ระบบพิกัดฉาก 3 มิติ
ถา
,
ad
u b ai b j ck v e di e j f k
c f
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥= = + + = = + +⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
แลว
( )
a d
u v b e ai b j ck di e j f k ad be cf
c f
⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥⋅ = ⋅ = + + )( + + = + +⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
หรือ
cosu v u v θ⋅ =
เมื่อ θ คือมุมระหวางเวกเตอร u และ v
ตัวอยาง เชน
1. กําหนดให 3 2 , 3 5 8u i j k v i j k= − + 6 = − − + จงหามุมระหวาง
เวกเตอร u และ v
วิธีทํา
1) ใชสูตร cosu v u v θ⋅ =
cos
u v
u v
θ
⋅
∴ =
2) หา u v⋅
38.
38
3 3
2 5(3)( 3) ( 2)( 3) (6)(8)
6
( 9) 6 48 45
u v
−⎡ ⎤ ⎡ ⎤
⎢ ⎥ ⎢ ⎥⋅ = − ⋅ − = − + − − +⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥8⎣ ⎦ ⎣ ⎦
= − + + =
3) หา u และ v
2 2 2
2 2 2
3 ( 2) 6 49 7
( 3) ( 5) 8 98 7 2
u
v
= + − + = =
= − + − + = =
4) หา cosθ จาก
cos
49
cos
7 (7 2)
1
cos
2
u v
u v
θ
θ
θ
⋅
=
=
⋅
∴ =
สมบัติของผลคูณเชิงสเกลาร
ให ,u v เปนเวกเตอรใดๆ และ a R∈
1) u v v u⋅ = ⋅
2) ( )u v w u v u w⋅ + = ⋅ + ⋅
3) ( ) ( )( ) ( )( )a u v au v u av⋅ = =
4) 0 0u⋅ =
45θ = °
39.
39
5)
2
u u u⋅=
6)
2 2 2
( ) ( ) 2( )u v u v u v u u v v+ ⋅ + = + = + ⋅ +
7)
2 2 2
( ) ( ) 2( )u v u v u v u u v v− ⋅ − = − = − ⋅ +
8) u v⊥ ก็ตอเมื่อ 0u v⋅ = เมื่อ , 0u v ≠
ตัวอยาง เชน
1. ให u และ v เปนเวกเตอร 1 หนวย ซึ่งทํามุมกัน
2
3
π
จงหาคาของ u v+
วิธีทํา
1) จาก
2
( )( )u v u v u v+ = + +
2 2
2
u u v u u v v v
u u v v
= ⋅ + ⋅ + ⋅ + ⋅
= + +
2) หา ,u v และ u v⋅
จากโจทย 1, 1u v= =
cos
2
(1)(1)cos
3
1
2
u v u v θ
π
⋅ =
=
=
3) หา u v+
40.
40
2 22
2
2 2
2
2
2
1
12( ) 1
2
1 1 1
1
1
u v u u v v
u v
u v
u v
u v
+ = + ⋅ +
−
+ = + +
+ = − +
+ =
∴ + =
2. กําหนดให 8, 2u v= = และ 9u v+ = จงหา u v−
วิธีทํา
1) หา u v⋅ จาก
[ ]
[ ]
2 2 2
2 2 2
2 2 2
2 2 2
2
2
1
2
1
9 8 2
2
1
81 64 4
2
1
13
2
13
2
u v u u v v
u v u v u v
u v u v u v
u v
u v
u v
u v
+ = + ⋅ +
⋅ = + − +
⎡ ⎤⋅ = + − +
⎢ ⎥⎣ ⎦
⎡ ⎤⋅ = − −⎣ ⎦
⋅ = − −
⋅ =
∴ ⋅ =
2) หา u v− จาก
41.
41
2 2 2
2
22
2
2
2
13
8 2( ) 2
2
64 13 4
55
55
u v u u v v
u v
u v
u v
u v
− = − ⋅ +
− = − +
− = − +
− =
∴ − =
11.ผลคูณเชิงเวกเตอร
ให ,u v เปนเวกเตอรใดๆ ผลคูณเชิงเวกเตอรของ u และ v เขียนแทนดวยสัญลักษณ
u v× โดยมีวิธีการหาคาดังนี้
ถา u ai b j ck= + + และ v di e j f k= + + แลว
( ) ( ) ( )
i j k i j
u v a b c a b
d e f d e
bf i cd j ae k dbk eci fa j
bf ec i cd fa j ae db k
× =
= + + − − −
= − + − + −
ตัวอยาง เชน
1. ให 2u i j k= − + และ 3 2v i j k= + − จงหา u v× และ v u×
วิธีทํา
1) หา u v×
42.
42
( 2)( 2)(1)(3) (1)(1) (1)(1) ( 2)(1)
4 3 ( 6 ) ( 2
i j k i j
u v
i j k k i j
i j k k i
× = 1 − 2 1 1 − 2
3 1 − 2 3 1
= − − + + −(3)(−2) − − −
= + + − − − − − )
3 5 7
j
i j k= + +
2) หา v u×
(1)(1) ( 2)(1) (3)( 2) ( 2)( 2) (1)(3)
2 6 4 3
i j k i j
v u
i j k k i j
i j k k i j
× = 3 1 − 2 3 1
1 − 2 1 1 − 2
= + − + − −(1)(1) − − − −
= − − − − −
3 5 7i j k= − − −
ขอสังเกต จากตัวอยางนี้สามารถอธิบายการหา u v× และ v u× ดวยแผนภาพดังนี้
สูตรที่ควรจํา sinu v u v θ× =
u
v
u v×
v u×
43.
43
2. ถา 2ui j k= + − และ 3 2 4v i j k= − − + และ θ เปนมุมระหวาง
u และ v จงหา sinθ
วิธีทํา
1) จากสูตร sinu v u v θ× =
sin
u v
u v
θ
×
=
2) หา ,u v และ u v×
2 2 2
2 2 2
( 3) ( 2) 4 29
2 1 ( 1) 6
v
u
= − + − + =
= + + − =
(1)(4) ( 1)( 3) (2)( 2) ( 2)( 1) (4)(2)
4 3 4 ( 3 ) 2
i j k i j
u v
i j k k i j
i j k k i
× = 2 1 −1 2 1
− 3− 2 4 − 3 − 2
= + − − + − −(−3)(1) − − − −
= + − − − − 8
2 5
j
i j k
−
= − −
2 2 2
2 ( 5) ( 1) 4 25 1 30u v∴ × = + − + − = + + =
3) หา sinθ
30 5
sin
6 29 29
u v
u v
θ
×
= = =
44.
44
สมบัติของผลคูณเชิงเวกเตอร
ให ,u vและ w เปนเวกเตอรใดๆ ในระบบพิกัดฉาก 3 มิติ และ a R∈
1) ( )u v v u× = − ×
2) ( ) ( ) ( )u v w u v u w× + = × + ×
3) ( ) ( ) ( )a u v au v u av× = × = ×
4) 0u u× =
5) ( ) ( )u v w u v w⋅ × = × ⋅
6) u v u× ⊥ และ u v v× ⊥ เสมอ เมื่อ , 0u v ≠
ขอควรจํา
1) ถา 1 1 1 2 2 2,u a i b j c k v a i b j c k= + + = + + และ
3 3 3w a i b j c k= + +
1 1 1
2 2 2
3 3 3
( ) ( )
a b c
u v w u v w a b c
a b c
⋅ × = × ⋅ =
ตัวอยาง เชน
1. กําหนดให ,a b เปนเวกเตอรใดๆ จงตรวจสอบวา
( ) ( ) 2( )a b a b a b− × + = × หรือไม
วิธีทํา
45.
45
( ) () ( ) ( )
( ) ( ) ( ) ( )
0 ( ) ( ) 0
a b a b a b a a b b
a a b a a b b b
b a a b
a b a
⎡ ⎤ ⎡ ⎤− × + = − × + − ×⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤= × − × + × − ×⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤= − × + × −⎣ ⎦ ⎣ ⎦
⎡ ⎤= × + ×⎣ ⎦
2
b
a b
⎡ ⎤
⎣ ⎦
⎡ ⎤= ×⎣ ⎦
2. ถา 2 3a i j k= + + และ 2 2b i j k= − + − และ
4
π
คือมุม
ระหวางเวกเตอร a และ b แลวขนาดของ a b× เทากับ 3 7 หนวยใชหรือไม
วิธีทํา
1) จาก sina b a b θ× =
2) หา ,a b
2 2 2
2 2 2
2 3 1 4 9 1 14
( 1) 2 ( 2) 1 4 4 9 3
a
b
= + + = + + =
= − + + − = + + = =
3) หา a b×
sin
( 14)(3)sin
4
1
(3 14)( )
2
3 7
a b a b
a b
a b
a b
θ
π
× =
× =
× =
∴ × =
46.
46
3. กําหนด 3, 2u i k v j xk= + = + และ 3w i j k= − + − ถา
,u v และ w อยูในระนาบเดียวกันแลว จํานวนจริง x มีคาเทากับเทาใด
วิธีทํา
1) ถา ,u v และ w อยูบนระนาบเดียวกันแลว
( ) ( ) ( ) ( )
( ) ( ) 0
u v w u w v v u w v w u
w u v w v u
⋅ × = ⋅ × = ⋅ × = ⋅ ×
= ⋅ × = ⋅ × =
2) เลือก ( ) 0u v w⋅ × = หา
1 0 3 1 0
( )
(1)(2)( 1) (0)( ) ( 3) (3)(0)(1) (3) (1)( )(1) ( 1)(0)(0)
2 0 0 18 0
u v w x
x x
x
⋅ × = 0 2 0 2
− 3 1 −1 − 3 1
= − + − + −(−3)(2) − − −
= − + + + − −
16 x= −
16 0x∴ − = 16x =
12.การประยุกตของเวกเตอรทางเรขาคณิต
เปนการนําเวกเตอรมาใชแกปญหาโจทยทางเรขาคณิต เชน ในเรื่องของพื้นที่ของรูปรางใน 2
มิติ และรูปทรงใน 3 มิติ เปนตน
ตัวอยาง เชน
1. ถา ABC เปนรูปสามเหลี่ยมใดๆ โดยที่ ,AB u AC v= = และ BC w=
จงพิสูจนวาพื้นที่ของสามเหลี่ยม ABC เทากับ
21
( )( ) ( )
2
v v w w v w⋅ ⋅ − ⋅
วิธีทํา
v w
u
θ
47.
47
พื้นที่
1
2
ABC v w=×
2 2
2
2 2
2
2 2 2 2
2
2
1
sin
2
1
sin
2
1
(1 cos )
2
1
cos
2
1
( )( ) ( )
2
v w
v w
v w
v w u w
v v w w v w
θ
θ
θ
θ
=
=
= −
= −
= ⋅ ⋅ − ⋅
2. ให u และ v เปนเวกเตอร และ θ เปนมุมระหวาง u และ v ถา u v+ ตั้งฉาก
กับ 2u v− และ 2u v+ ตั้งฉากกับ 2u v− และ 2u = แลว
cosθ มีคาเทากับเทาใด
u
v v
2u v− u v+
u
v v
u 2u v−
2u v+
48.
48
วิธีทํา
1. u v+ตั้งฉากกับ 2u v− แสดงวา
22
( )( 2 ) 0
2 2 0
2 0...........................(1)
u v u v
u u v u v u v v
u u v v
+ − =
⋅ + ⋅ − ⋅ − ⋅ =
− ⋅ − =
2. 2u v+ ตั้งฉากกับ 2u v− แสดงวา
22
( 2 )(2 ) 0
2 4 2 0
2 3 2 0...........................(2)
u v u v
u u v u u v v v
u u v v
+ − =
⋅ + ⋅ − ⋅ − ⋅ =
+ ⋅ − =
3. หา v
นําสมการ (1)x3
22
3 3 6 0...........................(3)u u v v− ⋅ − =
นํา (3)-(2)
22
5 8 0u v− =
แทนคา 2u =
2
2
5( 2) 8 0v− =
2
2
10 8
10
8
5
2
v
v
v
=
=
∴ =
4. หา u v⋅ จากสมการ (1)
22
2 0u u v v− ⋅ − =
แทนคา 2u = และ
5
2
v =
49.
49
2
2 5
( 2)2 0
2
5
2 0
2
5 1
2
2 2
u v
u v
u v
⎛ ⎞
− ⋅ − =⎜ ⎟⎜ ⎟
⎝ ⎠
− ⋅ − =
−
⋅ = − =
5. หา cosθ จาก cosu v u v θ⋅ =
แทนคา
1 5
, 2,
2 2
u v u v
−
⋅ = = =
1 5
( 2)( )cos
2 2
1 2 1
cos
2 5 2
1
cos
10
θ
θ
θ
−
=
− ⎛ ⎞⎛ ⎞⎛ ⎞
= ⎜ ⎟⎜ ⎟⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠
−
=
3. กําหนดให 3 4u i j= + และ 2v i j= − จงหาพ.ท.รูปสามเหลี่ยมที่ลอมรอบ
ดวยเวกเตอร ,u v และ u v−
วิธีทํา
1. พื้นที่สามเหลี่ยม ABC
1
2
u v= ×
u
u v−
v
50.
50
1
2
1 0
1
2
1
(0) (0)3 8 (0) (0)
2
1 11
(11)
2 2
i j k
i j k
i j k k i j
= 3 4 0
2 −1 0
= 3 4 0 3 4
2 −1 0 2 −1
= + − − − −
= =
5. ให 3 4u i j k= + − , 2v i j k= − + และ w i j k= + − จงหาปริมาตรของ
รูปทรงสี่เหลี่ยมดานขนาน ซึ่งมีดานเกิดจาก ,u v และ w
วิธีทํา
1) ปริมาตรรูปทรงสี่เหลี่ยมดานขนานซึ่งเกิดจาก ,u v และ ( )w u v w= ⋅ ×
2)
3 4 1
( )u v w
−
⋅ × = 2 −1 1
1 1 −1
3 4 1 4
3 4 2 1 3 8
9
− 3
= 2 −1 1 2 −1
1 1 −1 1 1
= + − − − +
=
6. จงหาพื้นที่ของรูปสี่เหลี่ยมดานขนานซึ่งมีจุดยอด 3 จุดที่ P(1,3,-2),Q(2,1,4)
และ R(-3,1,6)
วิธีทํา
1) หาเวกเตอร PQ และ PR
51.
51
(2 1) (13) (4 ( 2))
2 6
( 3 1) (1 3) (6 ( 2))
4 2 8
PQ i j k
i j k
PR i j k
i j k
= − + − + − −
= − +
= − − + − + − −
= − − +
2) พื้นที่สี่เหลี่ยมดานขนานที่มีจุดยอด P(1,3,-2),Q(2,1,4) และ R(-3,1,6) คือ
1 1
1 2 6
2 2
4 2 8
1
1 2 6 1 2
2
4 2 8 4 2
1
16 24 2 8 12 8
2
i j k
PQ PR
i j k i j
i j k k i j
× = −
− −
= − −
− − − −
= − − − − + −
2 2 2
1
4 32 10
2
1
( 4) ( 32) ( 10)
2
1
1140
2
2 285
i j k= − − −
= − + − + −
=
=
52.
52
แบบฝกหัด
1. จงแสดงวา
1 33
2 4 4
u i j k= − + เปนเวกเตอร 1 หนวย
2. จงหาเวกเตอร 1 หนวย ทิศทางเดียวกับเวกเตอร v ตอไปนี้
2.1) ( 3,4)v = −
54
3. จงหาคา uและ v ตอไปนี้วาตั้งฉากกันหรือไม
3.1) (3, 1), (2,6)u v= − =
3.2) (2,1), ( 1,1)u v= = −
3.3) 2 3 4 , 3u i j k v i j k= − + = + +
55.
55
3.4) 2 ,3 2 4u i j k v i j k= + + = − −
4. กําหนด 3 2 2 , 2 2u i j k v i j k= + + = − + จงหา
4.1) เวกเตอร 1 หนวยที่มีทิศทางเดียวกับเวกเตอร ,u v
4.2) u v⋅
56.
56
4.3) มุมระหวางเวกเตอร uและเวกเตอร v
5. จงหาเวกเตอรที่ตั้งฉากกับเวกเตอร ,u v ตอไปนี้
5.1) , 2 2 2u i j k v i j k= + + = + +
5.2) 2 3 , 2 3u i j k v i j k= + − = + +
5.3) 2 , 2u i k v j k= + = +
57.
57
6. จงแสดงวา 32 , 5 3 , 2 4A i j k B i j k C i j k= − + = − + + = + −
ประกอบกันเปนรูปสามเหลี่ยมมุมฉาก
58.
58
7. จงหามุมระหวางเวกเตอร 22 , 4 2 2A i j k B i j k= + + = − −
8. จากเวกเตอรตอไปนี้
3 4 5 , 9 7 3 , 2 2A i j k B i j k C i j k= + − = − + = + − จงหา
8.1) 2 , ,A B C A B A B− + ⋅ ×
61
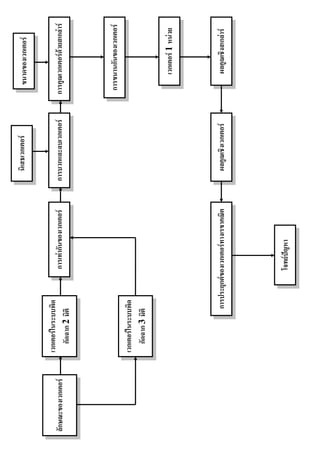
9. กําหนดให A,Bและ C เปนสามเหลี่ยมรูปหนึ่ง ที่มี AB เปนฐาน , AC และ BC
เปนดานประกอบมุมยอด ถาลากเสนตั้งฉากจากจุดกึ่งกลางของเวกเตอร แตละอันใหตัด
กันที่จุด x ซึ่งอยูภายในรูปสามเหลี่ยม ถาจุด A มีพิกัด (3,-2) จุด B มีพิกัด (6,2)
และจุด C มีพิกัด (5,4) จงเขียนเวกเตอร CX ในรูปของ ai b j+
62.
62
10. สามเหลี่ยม ABCมีเวกเตอร AB,AC และ BC เปนดานประกอบมุมยอด
และมี : : 1: 2:1AB AC BC = ที่จุด A ลาก AA BC′ ⊥ และที่จุด B
ลาก BB AC′ ⊥ จงแสดงการหาคาของ
AA
BB
′
′ โดยละเอียด













![15
( )
[( ) ( )]
( 2 )
2
CA CB BA
CA CD DB BA
CA b b a
CA b a
CA a b
= +
= + +
= − + − +
= − +
∴ = −
6. ขนาดของเวกเตอร
ขนาดของเวกเตอรใดๆ คือ ความยาวของลูกศรของเวกเตอรนั้นๆ
เราใชสัญลักษณ u แทน ขนาดของเวกเตอร u
ในระบบพิกัดฉาก 2 มิติ ในระบบพิกัดฉาก 3 มิติ
ถา 2 2
u ai b j
u a b
= +
= +
ถา 2 2 2
u ai b j ck
u a b c
= + +
= + +
ตัวอยาง เชน
1. กําหนดให 3 4u i j= + จงหา u
วิธีทํา
2 2
3 4
3 4
9 16
25
5
u i j
u
u
u
u
= +
= +
= +
=
∴ =
2. กําหนดให 2 3u i j k= + + จงหา u
วิธีทํา](https://image.slidesharecdn.com/vector1-161215110348/85/Vector-15-320.jpg)























![40
2 22
2
2 2
2
2
2
1
1 2( ) 1
2
1 1 1
1
1
u v u u v v
u v
u v
u v
u v
+ = + ⋅ +
−
+ = + +
+ = − +
+ =
∴ + =
2. กําหนดให 8, 2u v= = และ 9u v+ = จงหา u v−
วิธีทํา
1) หา u v⋅ จาก
[ ]
[ ]
2 2 2
2 2 2
2 2 2
2 2 2
2
2
1
2
1
9 8 2
2
1
81 64 4
2
1
13
2
13
2
u v u u v v
u v u v u v
u v u v u v
u v
u v
u v
u v
+ = + ⋅ +
⋅ = + − +
⎡ ⎤⋅ = + − +
⎢ ⎥⎣ ⎦
⎡ ⎤⋅ = − −⎣ ⎦
⋅ = − −
⋅ =
∴ ⋅ =
2) หา u v− จาก](https://image.slidesharecdn.com/vector1-161215110348/85/Vector-40-320.jpg)





































































![Ppt%20vector[1]](https://cdn.slidesharecdn.com/ss_thumbnails/ppt20vector1-100920022645-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





































