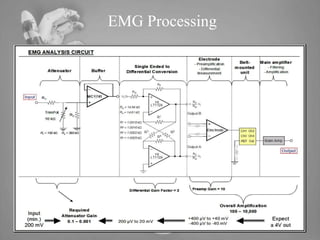
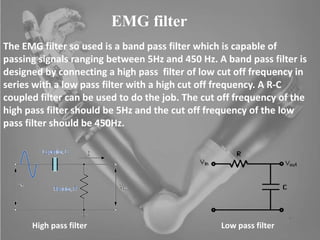
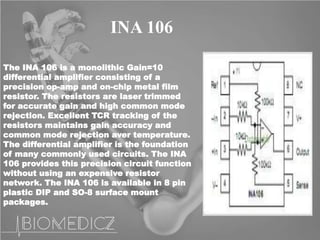
This document discusses the use of electromyography (EMG) signals to control a bionic arm. EMG signals are generated by muscle contractions and detected by surface electrodes on the skin. These signals are filtered and amplified before being fed into a microprocessor programmed to control motors in the artificial arm. When the user contracts their muscles, the EMG signals are processed to trigger corresponding movements in the bionic limb. Key steps include EMG signal generation and processing, as well as addressing challenges like weak signal acquisition and filter design.