Downloaded 32 times

![6
Currently Available Prosthetic Systems*
Touch Bioinics Open Hand Project Bebionics
Price range: USD 10K
Products:
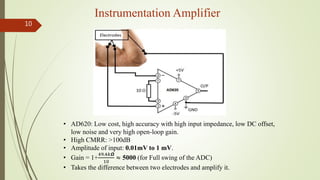
• i-limb revolution
• i-limb ultra
• i-limb digits
• livingskin
• Price range: USD 1K
• They are using 3D
printer technology
• Price range:
Between USD 11-
60K.
• Most advanced
prosthetic
technology
• Human like hand
movement system.
Price range: USD 6K
Products:
• Brunel Hand 2.0
• Hero Arm
Open Bionics
*Ref: [2]-[5]](https://image.slidesharecdn.com/emgpresentation-200130144050/85/EMG-controlled-Prosthetic-Arm-6-320.jpg)

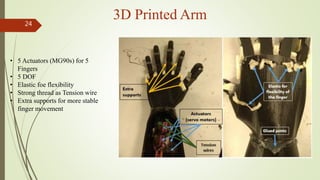
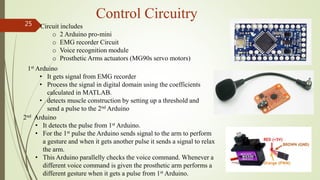
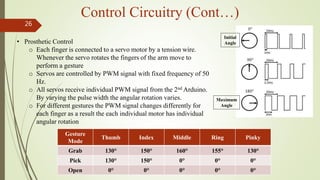
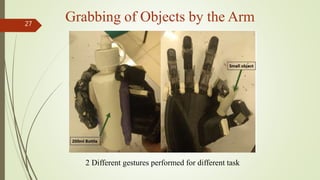

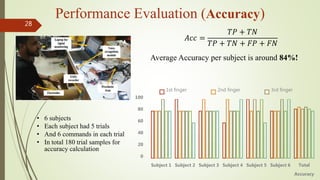
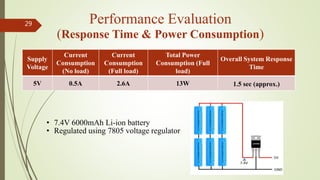




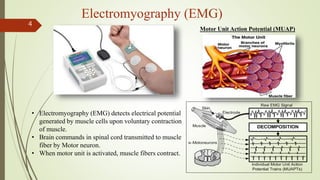
This document summarizes a project to design and implement an EMG-controlled 3D printed prosthetic arm. Key aspects include: 1) An analog front-end circuit was designed to record muscle electrical signals (EMGs) from surface electrodes and filter the signals. 2) A prosthetic arm design was 3D printed with 5 fingers and 5 degrees of freedom. Servo motors control finger movement. 3) EMG signals are analyzed in MATLAB and used to detect muscle contractions and control the prosthetic arm motions in real-time using an Arduino microcontroller. 4) Testing showed the system achieved over 84% accuracy in gesture recognition with a response time of 1.5 seconds using a






















































































