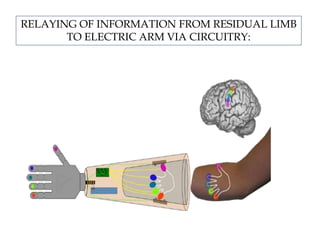
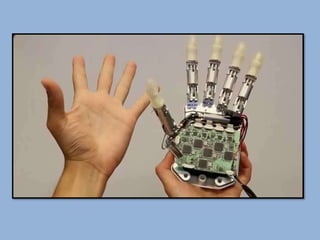
The document discusses myoelectric prostheses, which are artificial devices that replace missing body parts and use existing muscle signals in the residual limb to control their functions. Various materials such as metals, composites, and polymers are used in their construction, while multiple myoelectric control systems are described, including implanted sensors and RFID-based limbs. The advantages include flexibility and the ability to accommodate children, while disadvantages highlight issues like durability and cost.