Downloaded 60 times

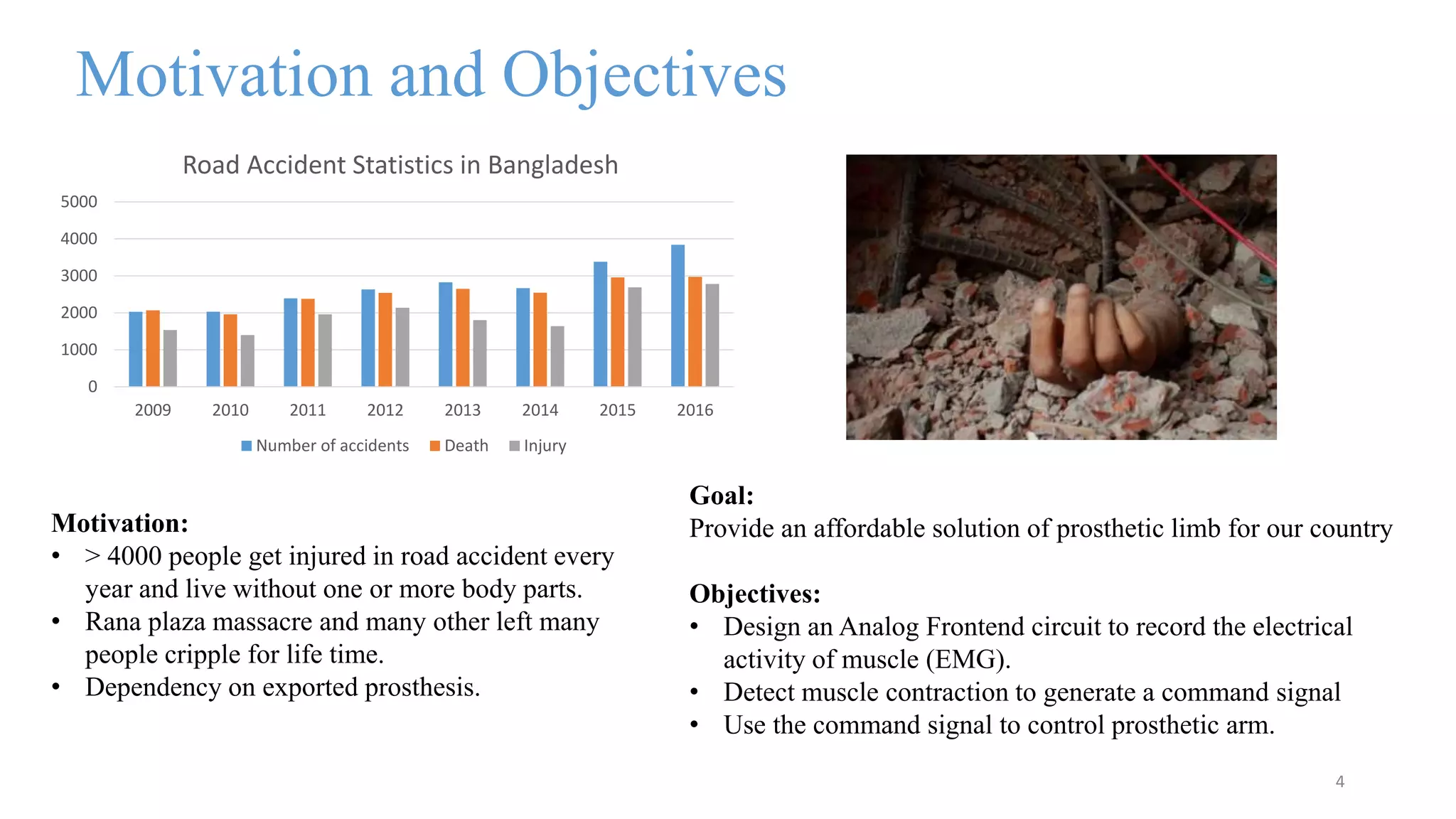
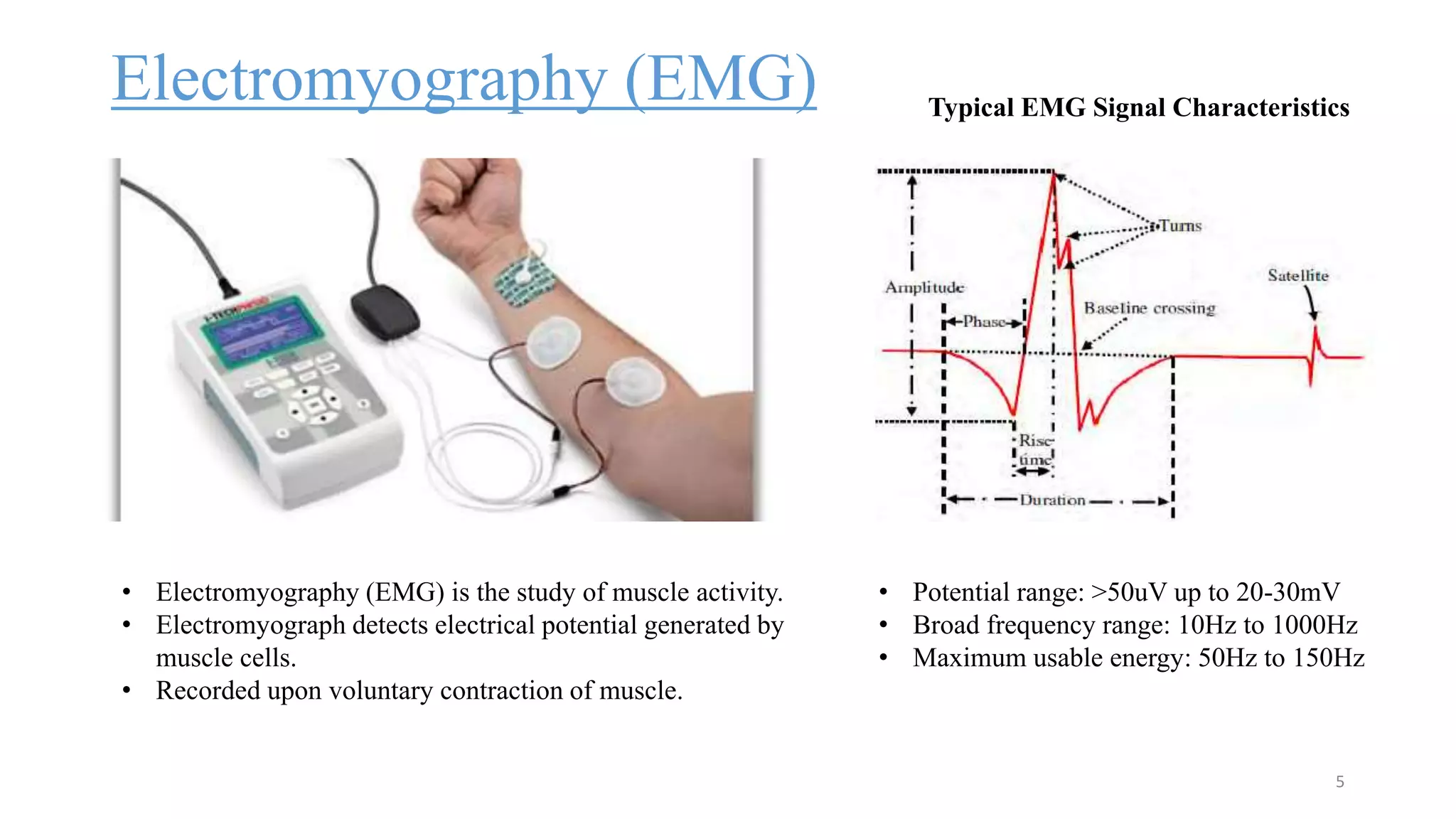
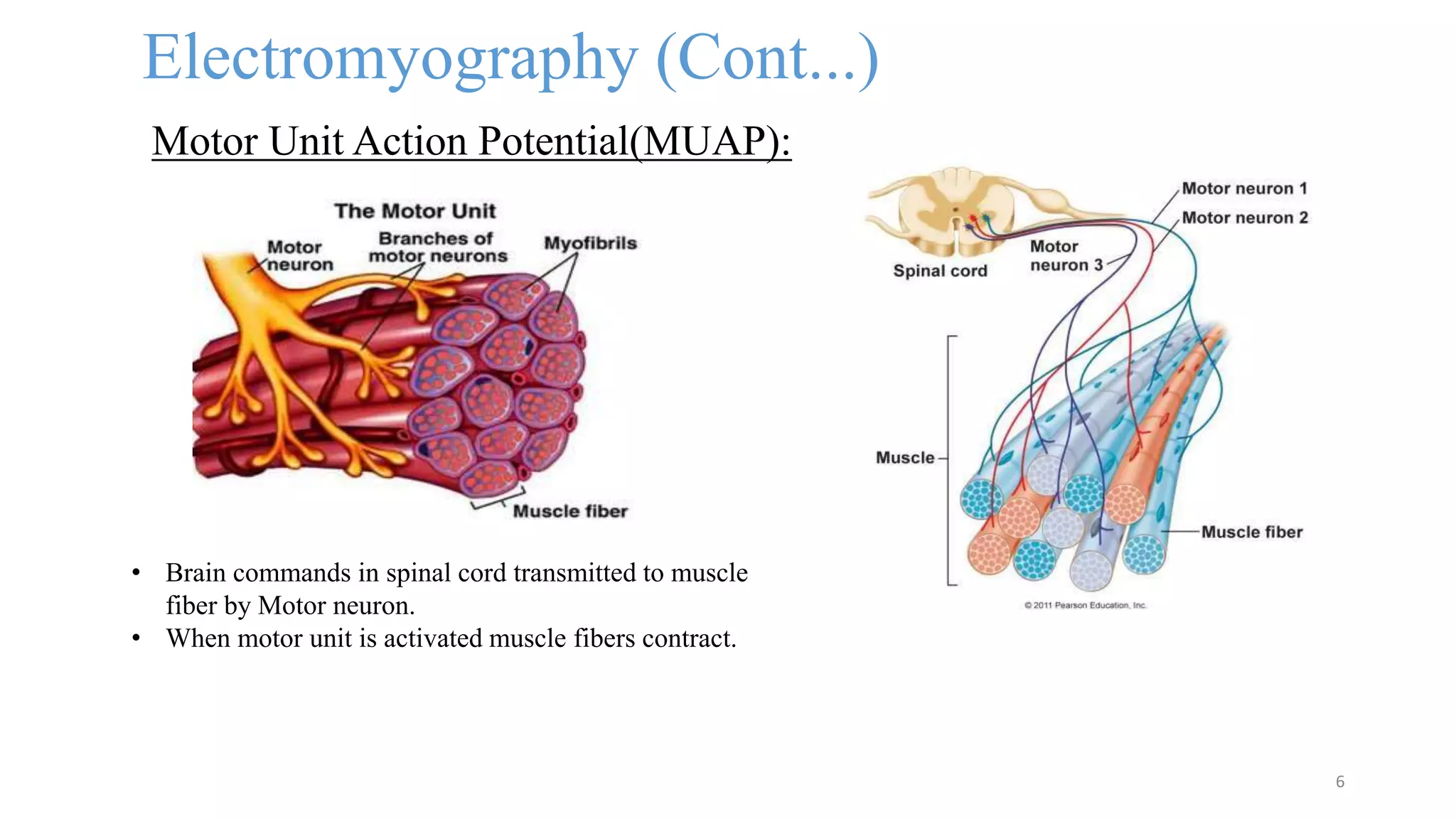

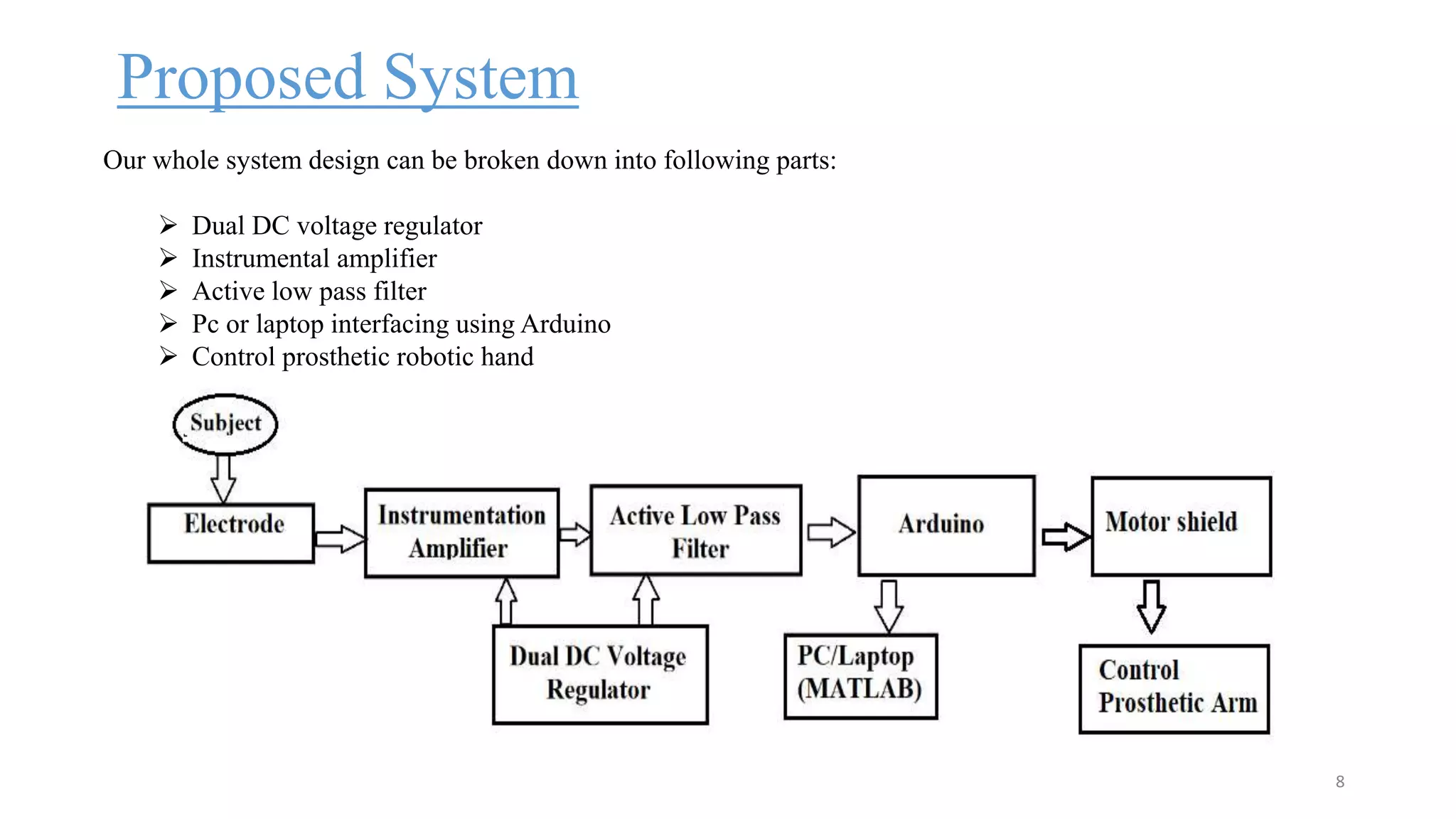
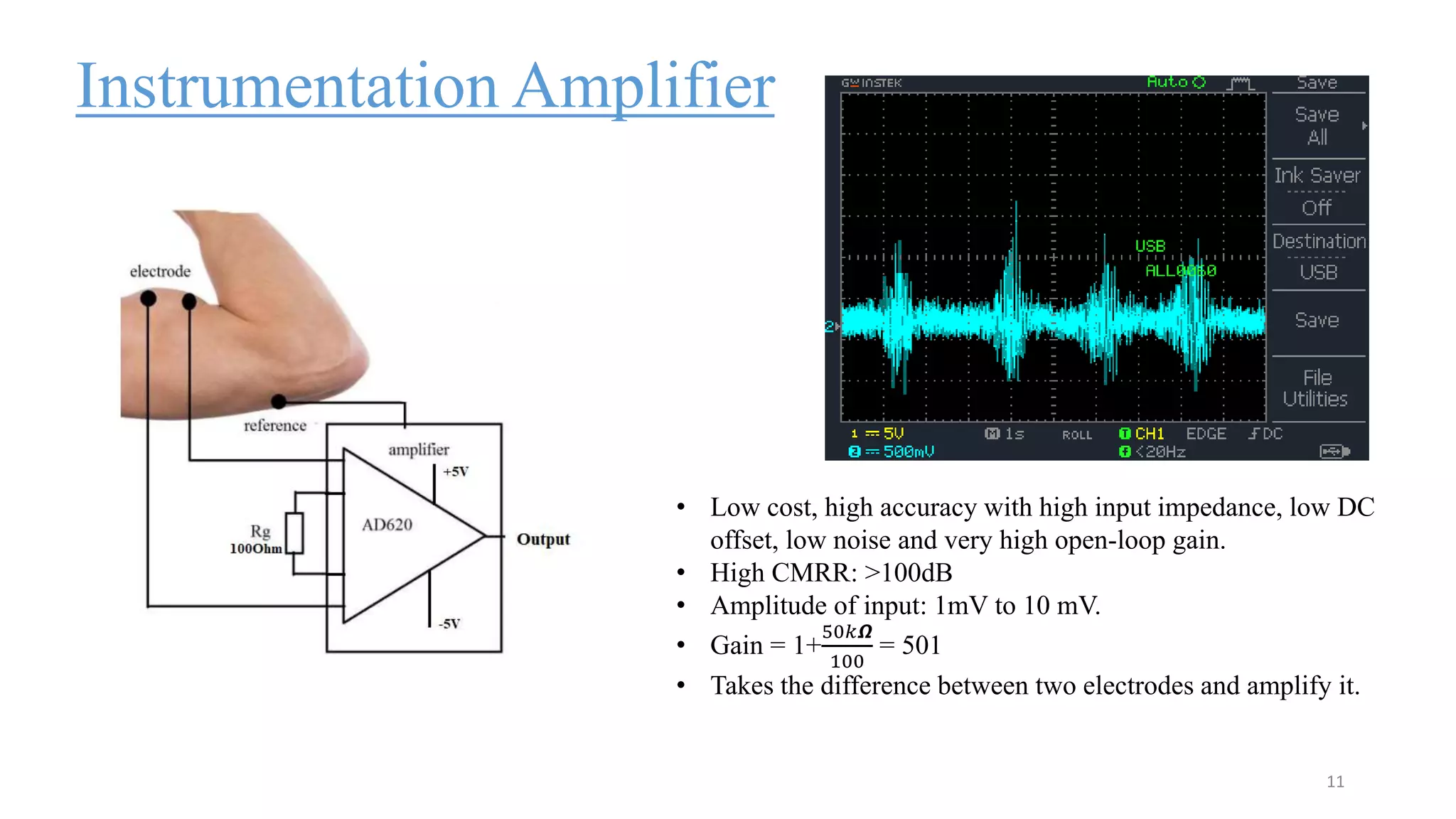
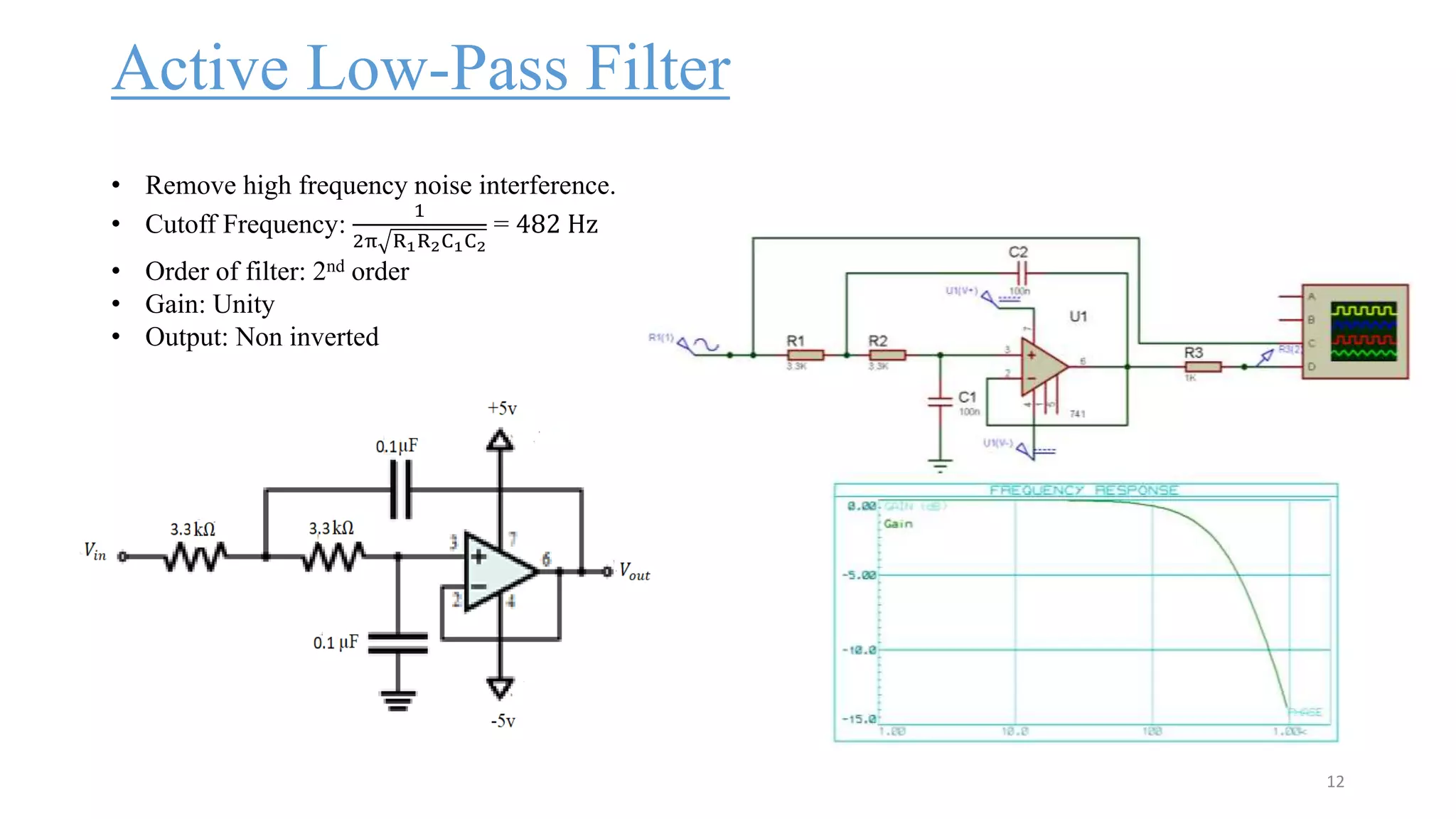
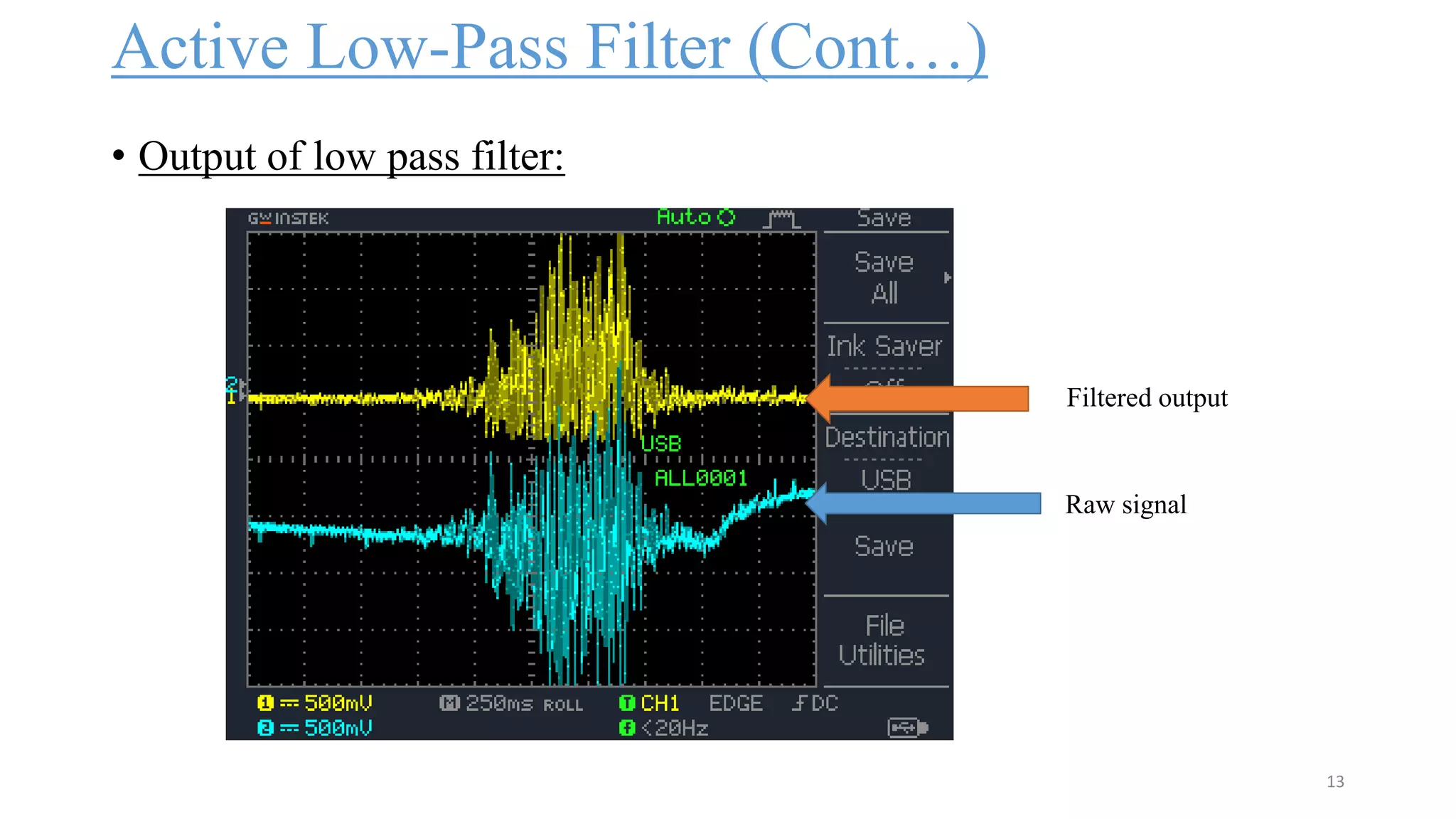
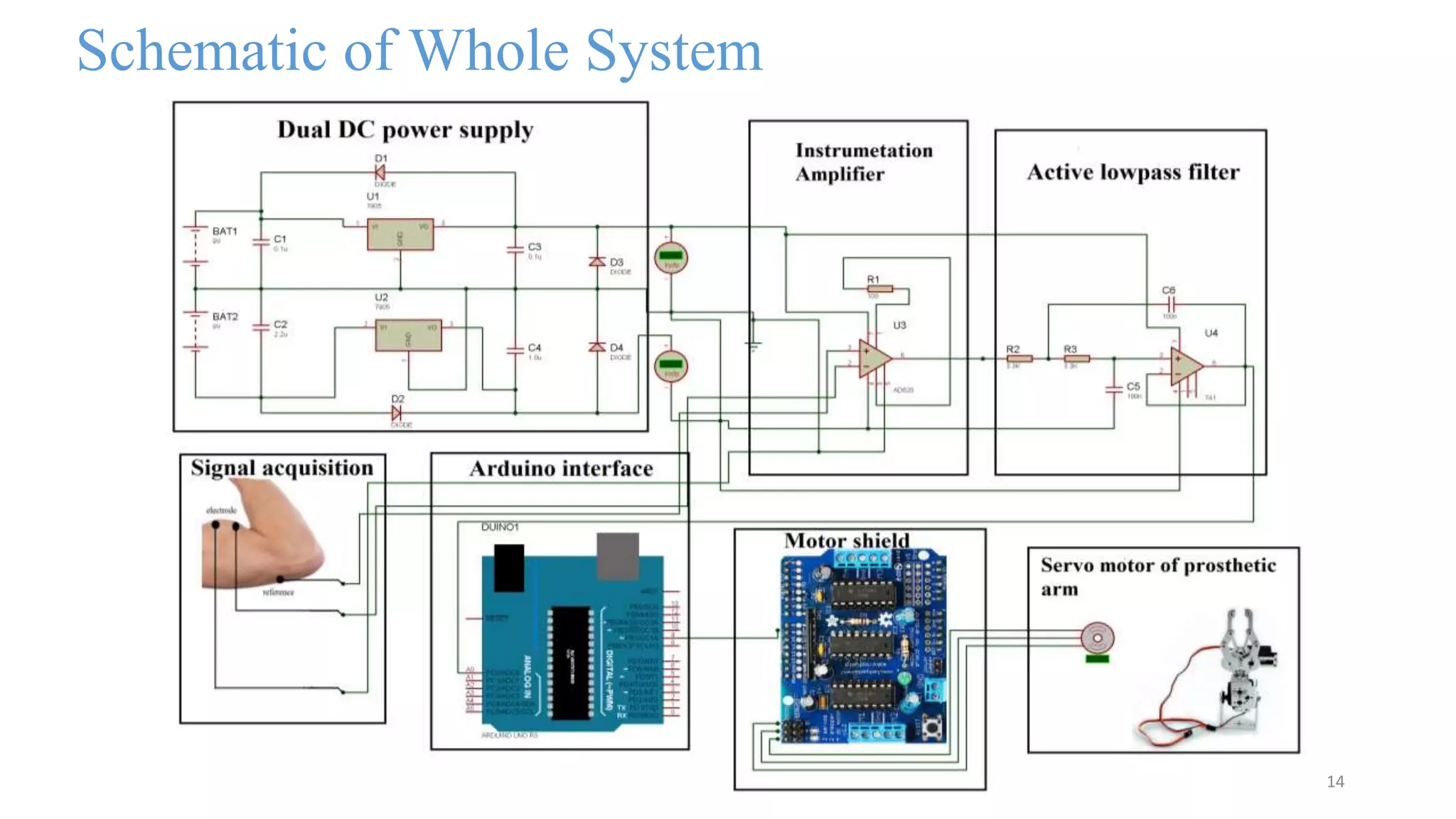
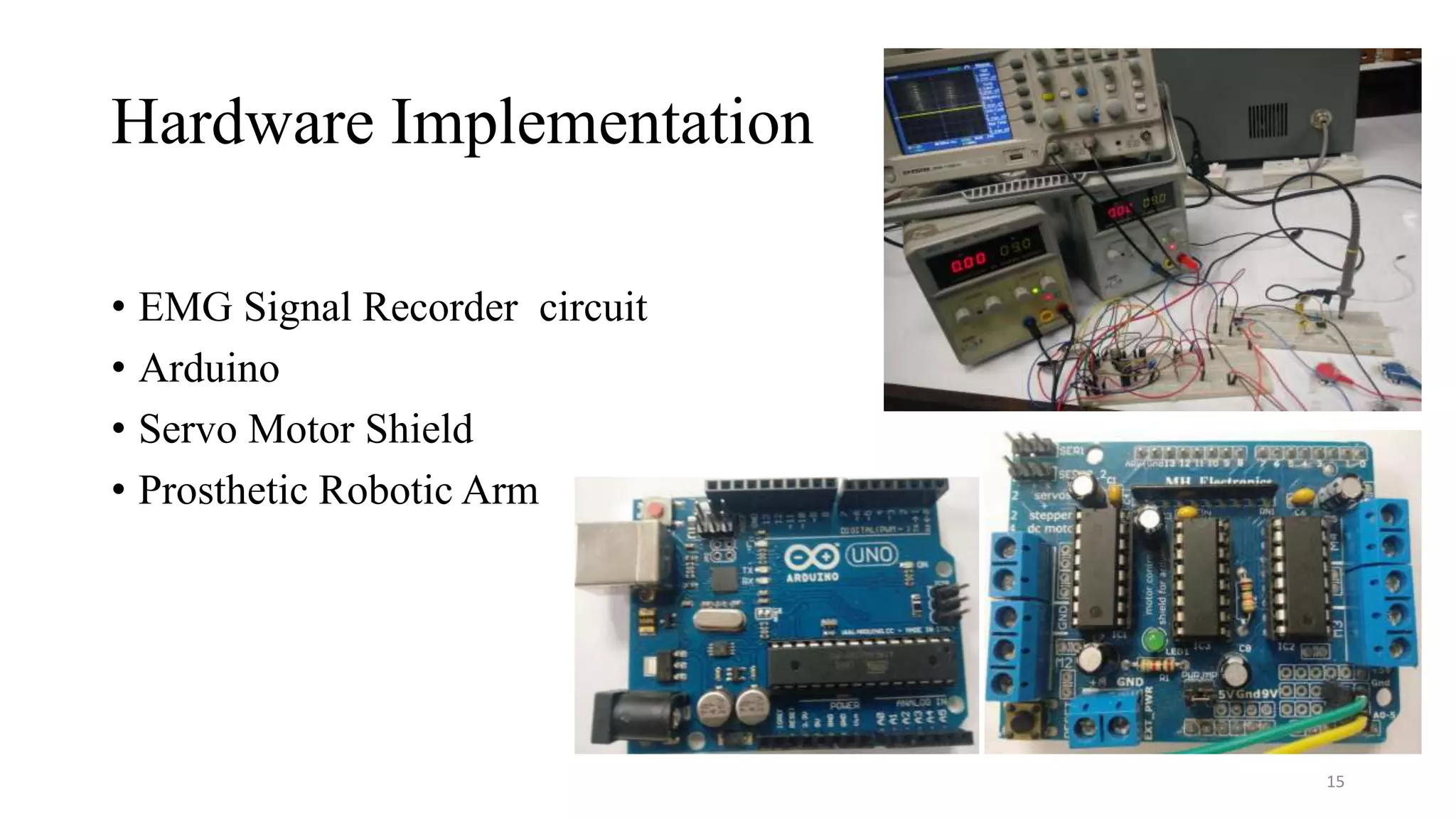

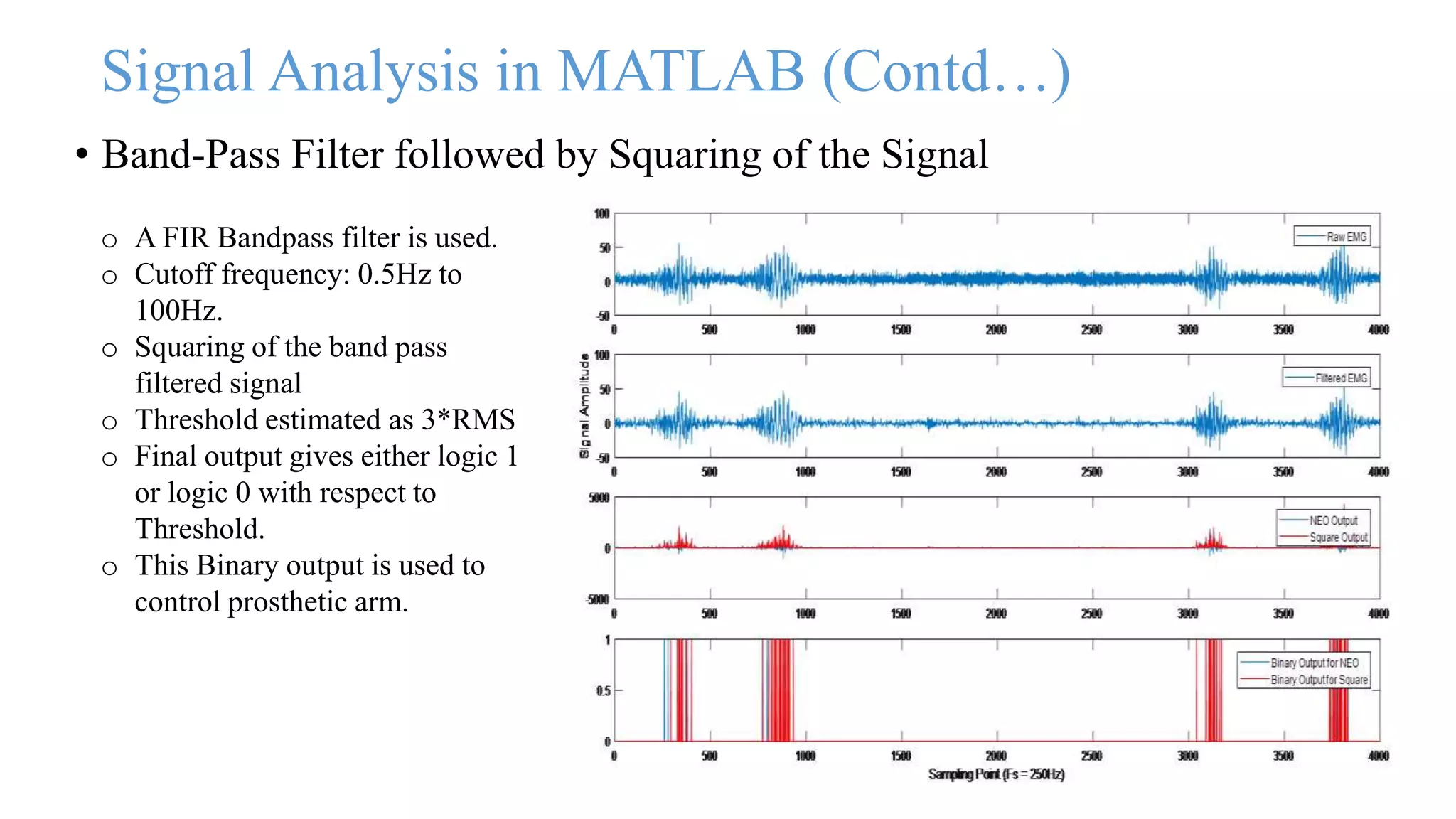
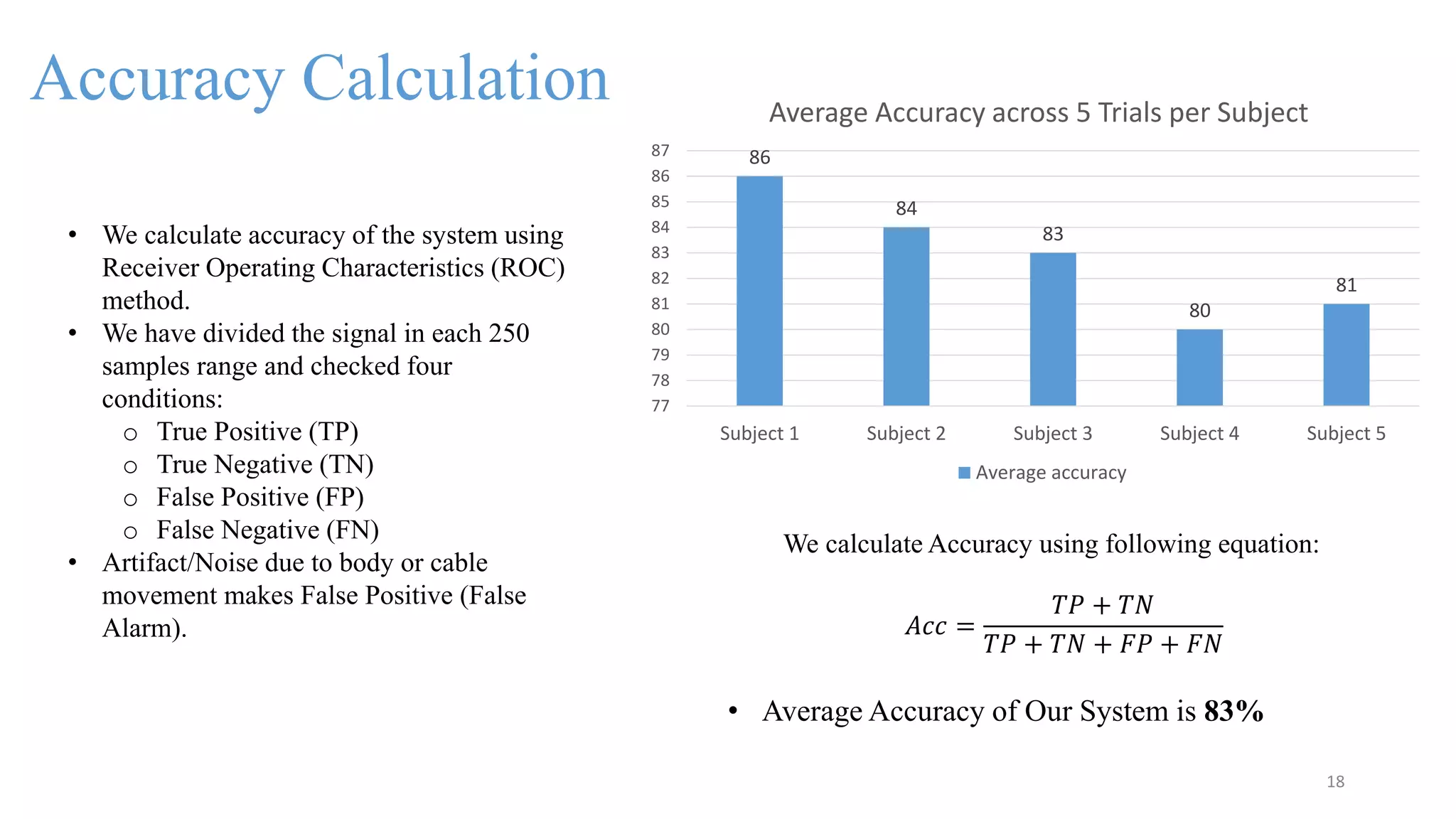
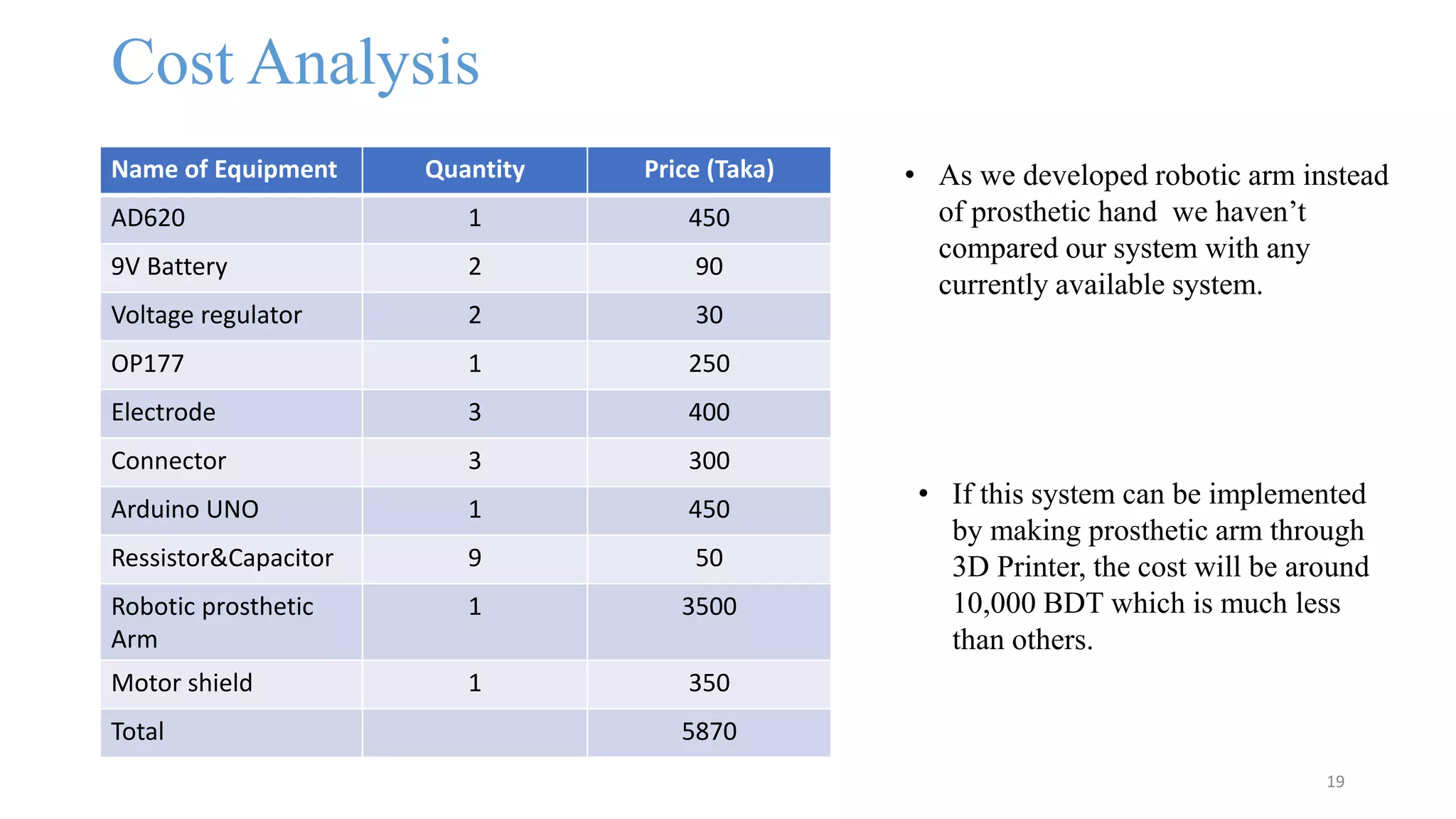


This document summarizes a student project to design and implement an affordable EMG signal recorder to control a prosthetic arm. The system uses EMG electrodes to detect muscle signals, filters and amplifies the signals, analyzes them using MATLAB, and uses the output to control a robotic prosthetic arm. The system achieves an average accuracy of 83% across 5 test subjects. It costs around 10,000 BDT to build, making it much more affordable than commercial prosthetics. Future work could involve 3D printing a prosthetic hand and allowing individual finger movement control.






















































































