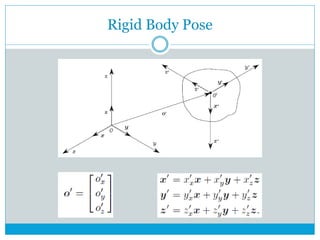
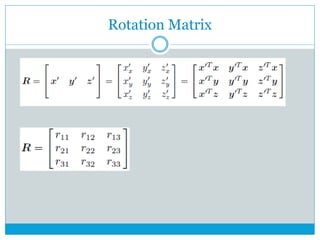
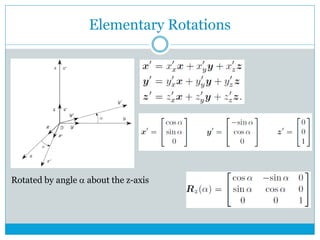
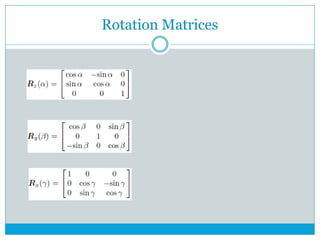
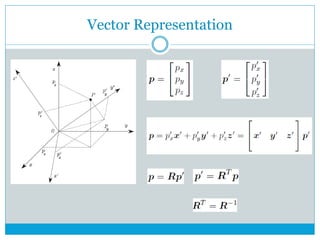
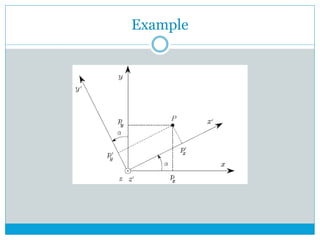
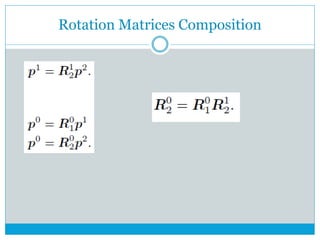
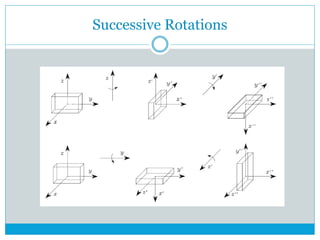
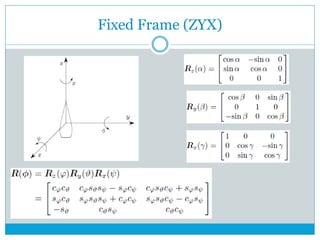
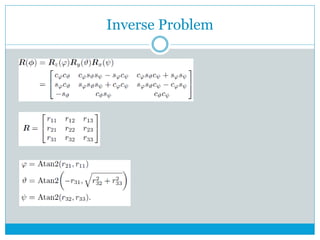
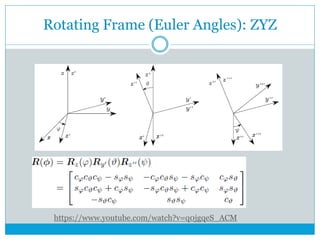
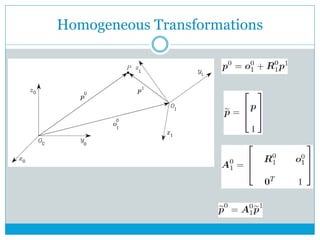
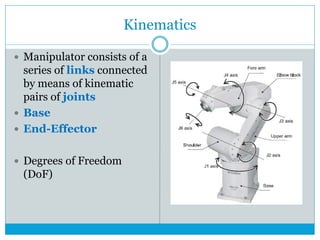
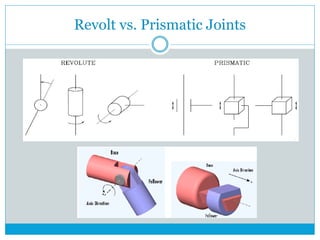
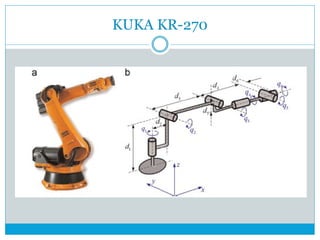
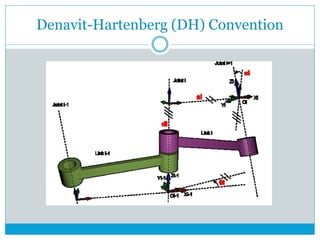
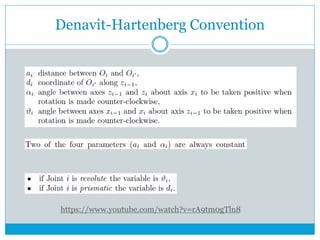
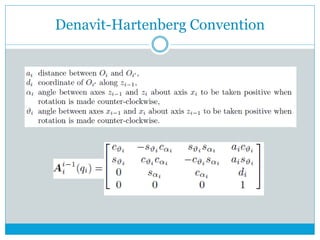
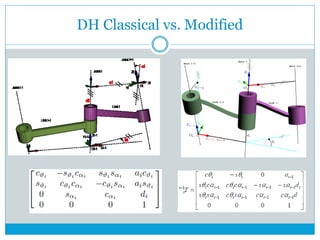
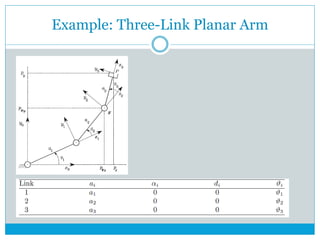
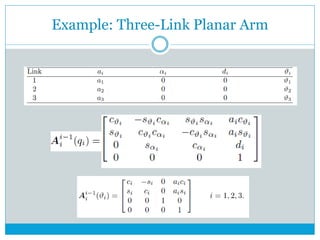
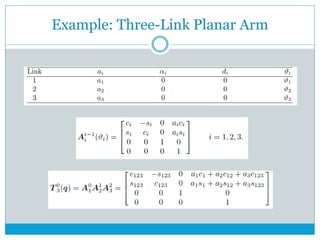
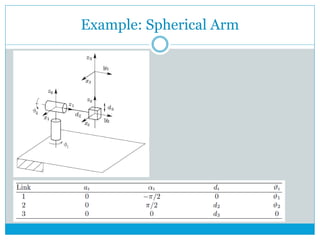
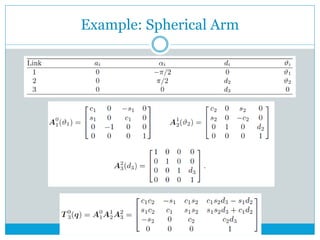
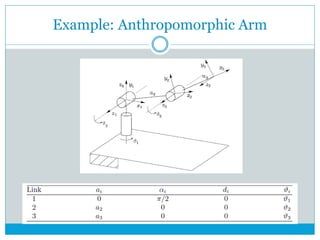
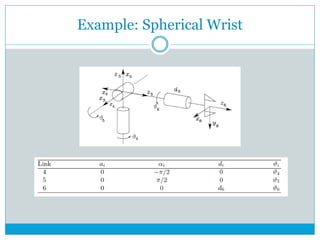
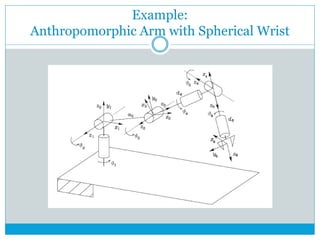
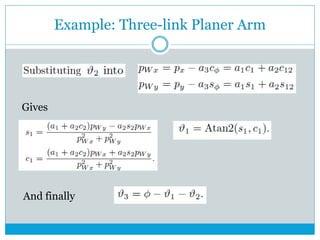
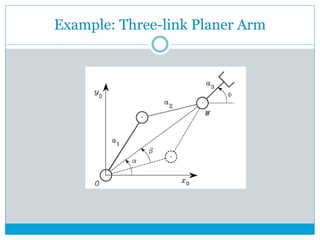
The document outlines key concepts in robotics kinematics, including rigid body poses, rotation matrices, and direct and inverse kinematics. It details manipulator structures and the Denavit-Hartenberg convention for describing robot movements, with examples including three-link planar and spherical arms. Additionally, the document addresses kinematic calibration techniques to estimate parameters and discusses the complexity of inverse kinematics compared to direct kinematics.