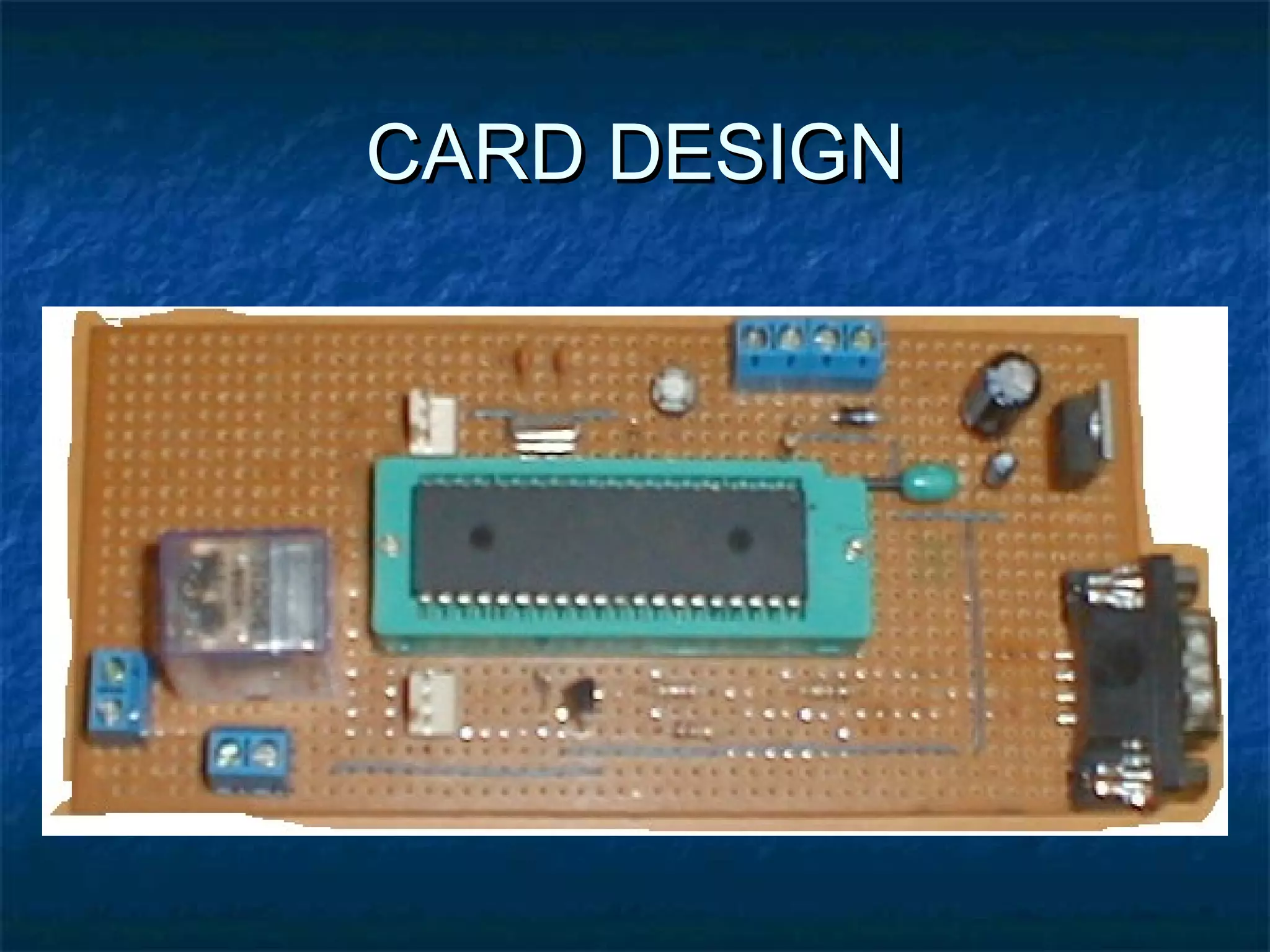
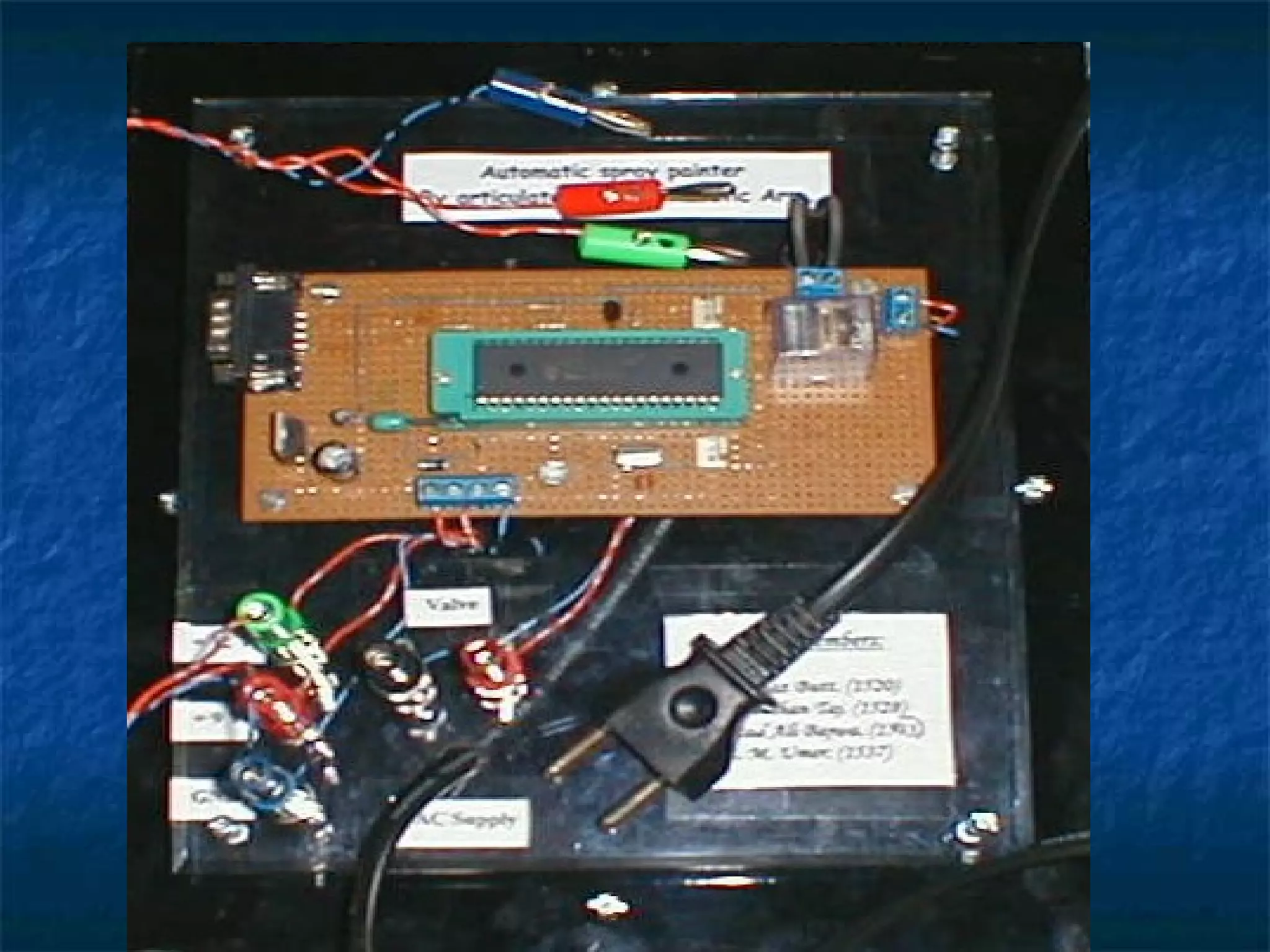
This document describes the design of an automatic spray painter using a 2 degree-of-freedom articulated robotic arm. The objective is to design a robotic arm that can paint any character from A to Z or any number from 0 to 9. The system uses programmable automation and consists of actuators, sensors, a microcontroller and other electronic components. The articulated robotic arm has revolute joints at the shoulder and elbow. DC servo motors with gearboxes are used as actuators to provide the required torque and angular motion. The trajectory and kinematics of the 2-DOF arm are analyzed using forward and inverse transformations. An end effector spray gun is used to apply paint in the desired patterns.





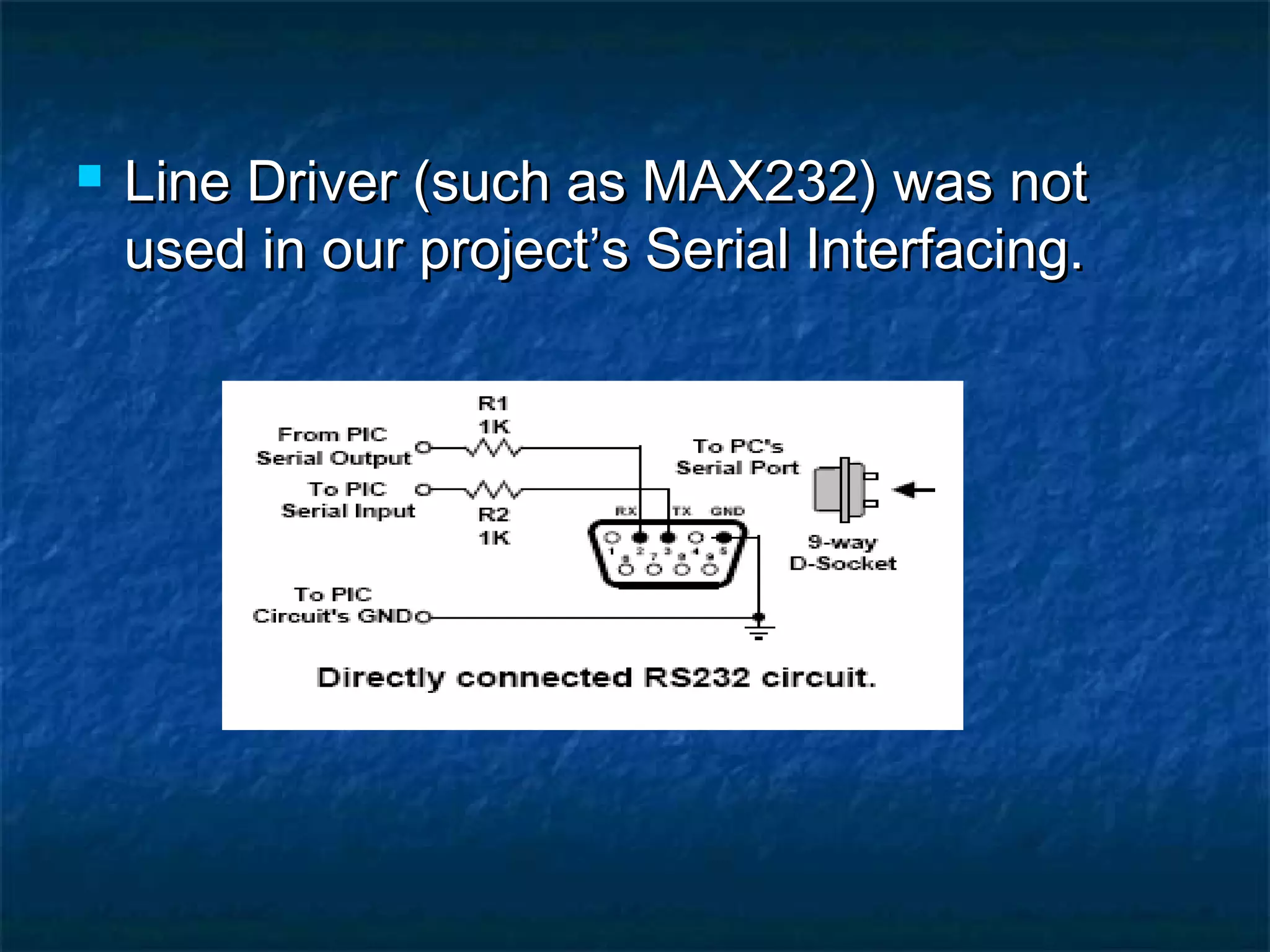
![SERIAL INTERFACINGSERIAL INTERFACING
Built in instruction SERIN and SEROUT inBuilt in instruction SERIN and SEROUT in
PIC-Basic.PIC-Basic.
Format:Format: SERINSERIN RpinRpin,, BaudmodeBaudmode,, [[InputInput]]
Baudmode we used is 16468, represents:Baudmode we used is 16468, represents:
Baud Rate 9600 bpsBaud Rate 9600 bps
8-bit, no parity check, inverted, 1-Stop bit8-bit, no parity check, inverted, 1-Stop bit](https://image.slidesharecdn.com/4a0d256a-4a0d-4ac4-961a-42f718372189-161205174438/75/Final-Presentation-62-2048.jpg)































































![[IJET-V1I4P11] Authors :Wai Mar Myint, Theingi](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i4p11-150811160919-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




