This document provides an overview of quadratic programming, including:
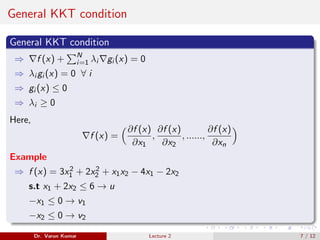
1. It defines quadratic programming as a special case of nonlinear programming where the objective function is quadratic and all constraints are linear.
2. It presents the general mathematical formulation of a quadratic programming problem and provides an example problem.
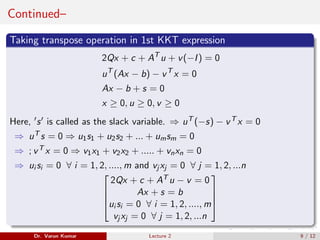
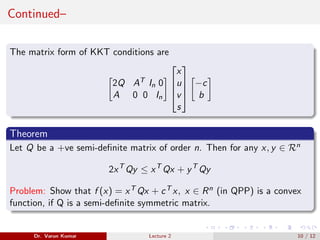
3. It discusses solutions to quadratic programs using the graphical method and the Karush-Kuhn-Tucker (KKT) conditions.

![Introduction to Quadratic Programming
⇒ Quadratic programming problem (QPP) is special case of non-linear
programming problem (NLPP).
⇒ Objective function is quadratic in nature.
⇒ All constraints (in-equality and equality) are linear in nature.
⇒ General mathematical formulation for QPP
min{f (x)} =xT
Qx + cT
x
s.t Ax ≤ b
x ≥ 0
⇒ Q = [qij ]n×n → Symmetric positive semi-definite matrix.
⇒ c, x ∈ Rn → Vector of size n × 1 (Contain real number).
⇒ A = [aij ]m×n → Matrix of size m × n
Dr. Varun Kumar Lecture 2 3 / 12](https://image.slidesharecdn.com/quadraticprogramming-210203060337/85/Quadratic-programming-Tool-of-optimization-3-320.jpg)
![Example:
⇒ Let objective function f (x) = 3x2
1 + 4x2
2 + 2x1x2 − 2x1 − 3x2
⇒ Constraint:
3x1 + 2x2 ≤ 6
x1 + x2 ≤ 2
x1, x2 ≥ 0
⇒ Problem representation
min{f (x)} = [x1 x2]
3 1
1 4
x1
x2
+ [−2 − 3]
x1
x2
3 2
1 1
x1
x2
≤
6
2
⇒ x =
x1
x2
, Q =
3 1
1 4
, b =
6
2
, A =
3 2
1 1
, c =
−2
−3
Dr. Varun Kumar Lecture 2 4 / 12](https://image.slidesharecdn.com/quadraticprogramming-210203060337/85/Quadratic-programming-Tool-of-optimization-4-320.jpg)
![Solution by the graphical method:
Positive semi-definite and symmetric
⇒ Q =
3 1
1 4
→ [qij ]2×2, if qij = qji → Symmetric
⇒ If det|Q| ≥ 0 → Positive semi-definite
Solution by graphical method:
⇒ Let objective function f (x) = (x1 − 2)2 + (x2 − 1)2
⇒ Constraint:
x1 + x2 ≤ 2
x1, x2 ≥ 0
Dr. Varun Kumar Lecture 2 5 / 12](https://image.slidesharecdn.com/quadraticprogramming-210203060337/85/Quadratic-programming-Tool-of-optimization-5-320.jpg)