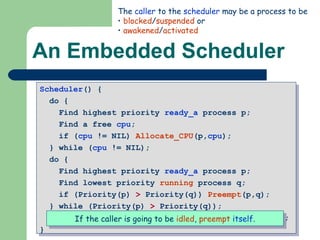
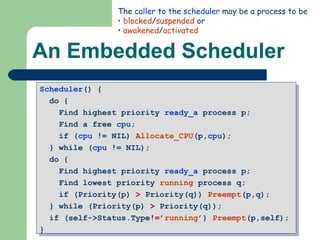
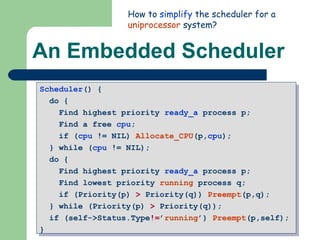
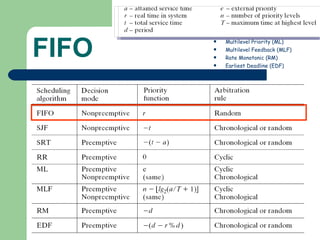
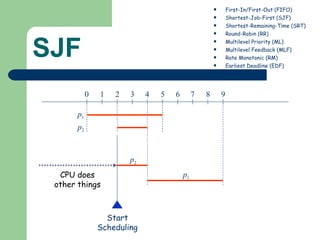
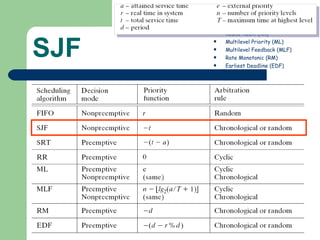
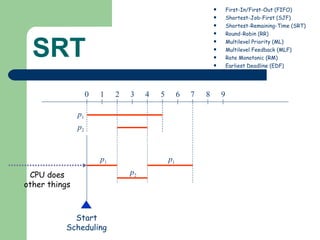
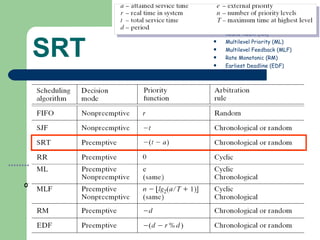
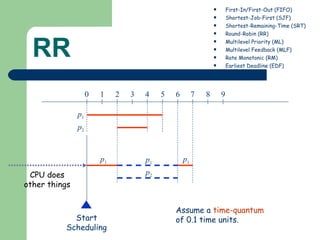
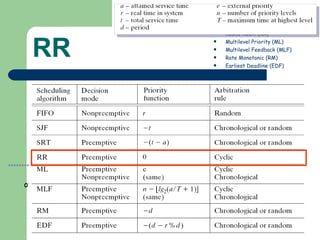
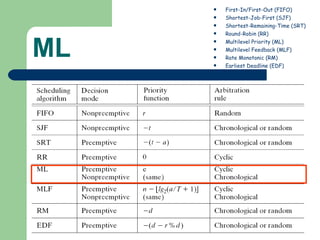
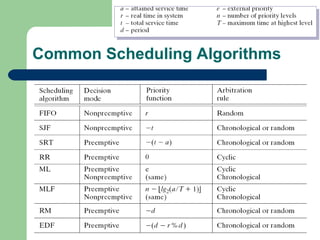
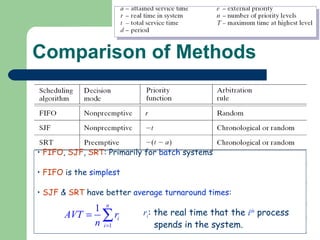
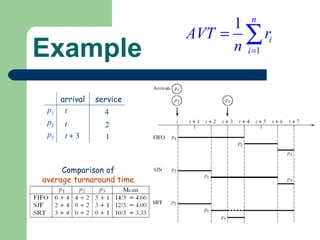
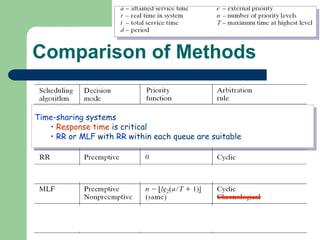
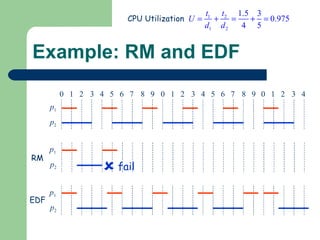
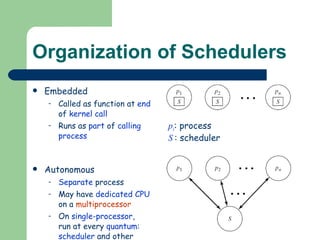
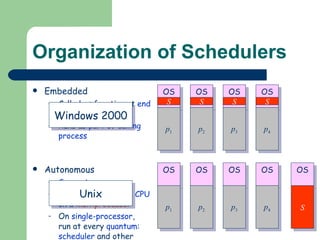
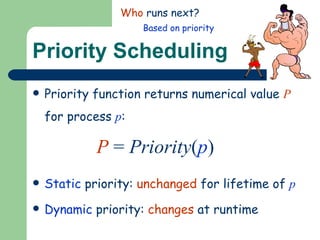
The document discusses different scheduling algorithms used in operating systems. It describes embedded and autonomous schedulers, priority scheduling, and common scheduling algorithms like first-in-first-out (FIFO), shortest job first (SJF), round-robin (RR), and earliest deadline first (EDF). It also compares different scheduling methods and discusses how scheduling policies are determined by factors like priority functions and decision modes.



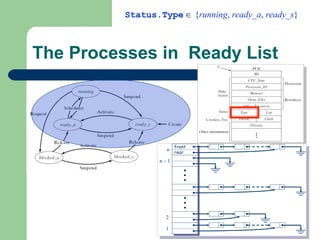
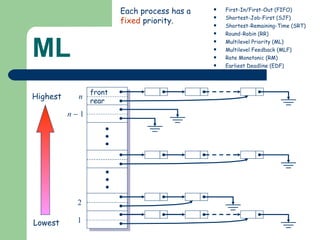
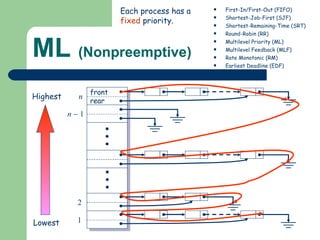
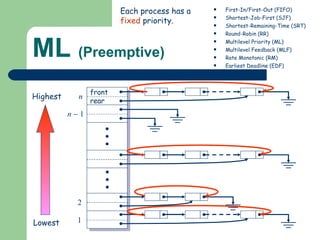
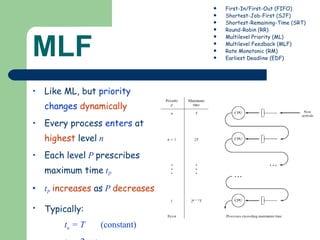
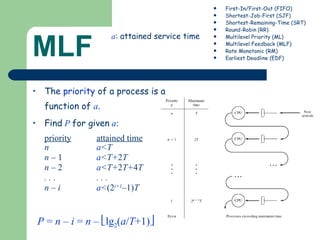
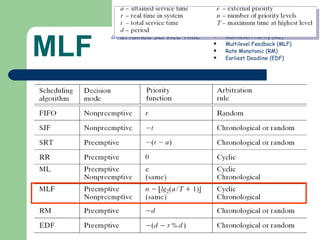
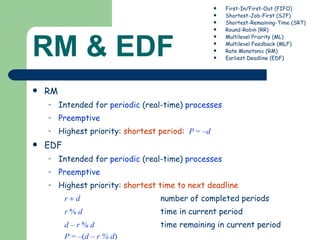
![Priority-Leveled Processes Priority divides processes into levels Implemented as multilevel ready list, say, RL p at RL [ i ] run before q at RL [ j ] if i > j p , q at same level are ordered by other criteria, e.g., the order of arrival . RL [ n ]](https://image.slidesharecdn.com/os5-2-100818024453-phpapp01/85/Os5-2-8-320.jpg)