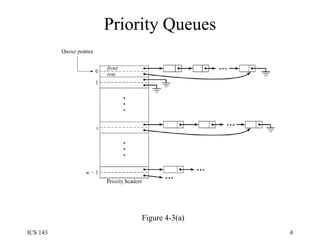
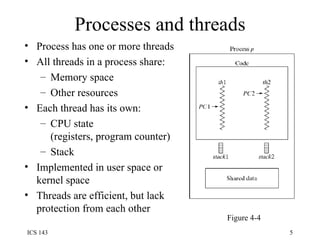
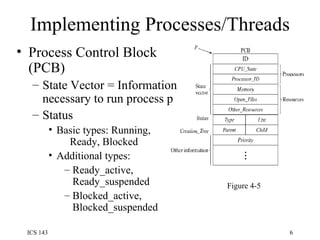
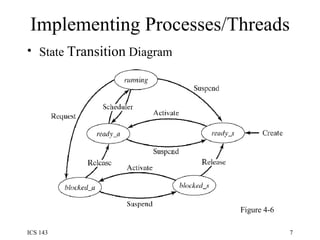
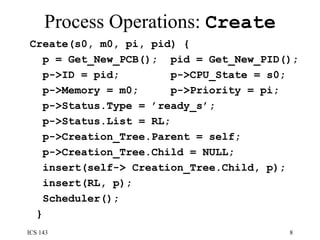
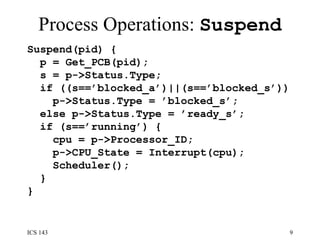
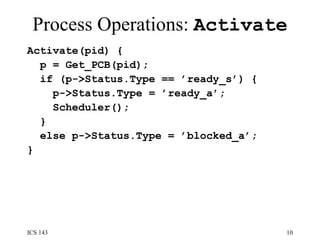
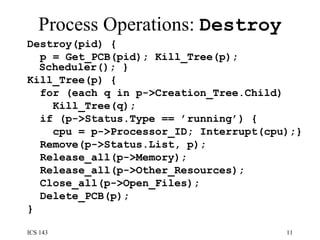
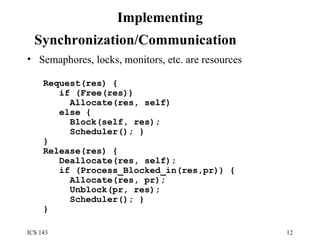
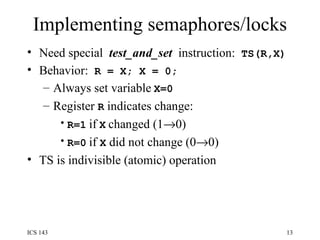
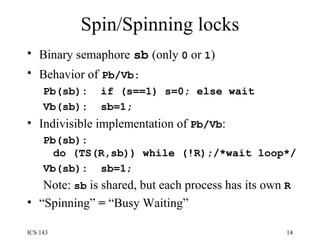
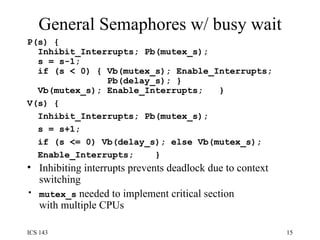
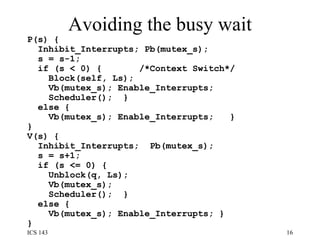
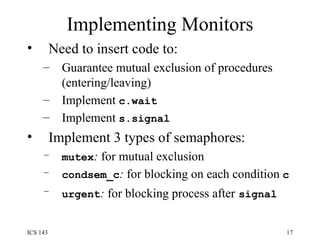
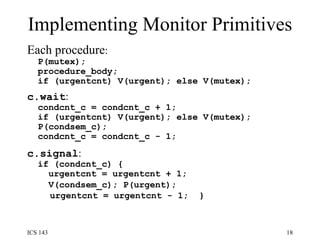
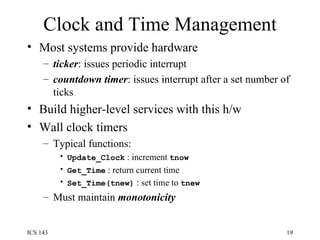
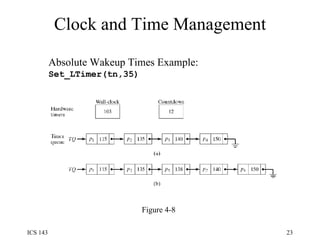
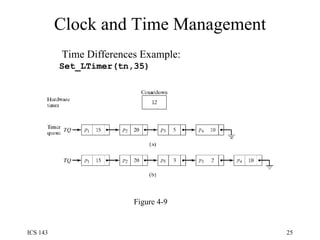
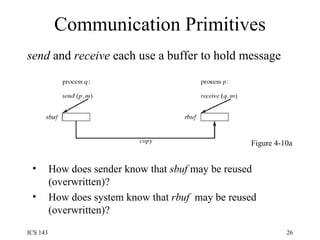
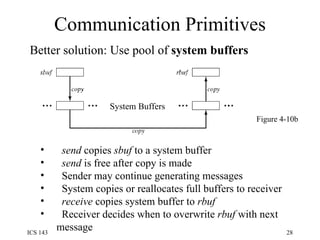
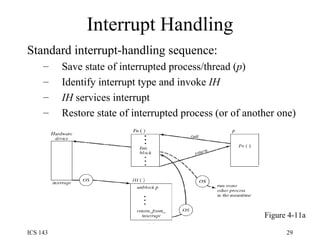
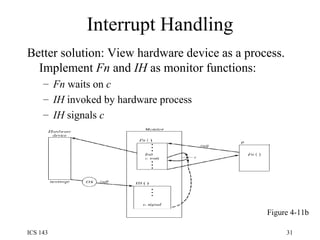
The document summarizes key concepts related to operating system kernels including process and thread management, synchronization mechanisms like semaphores and monitors, interrupt handling, and communication primitives. It describes data structures like process control blocks and priority queues used to implement these concepts. It also explains algorithms for operations on processes, synchronization, clock management, and interrupt servicing.