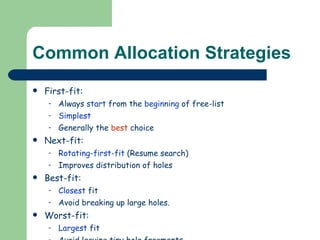
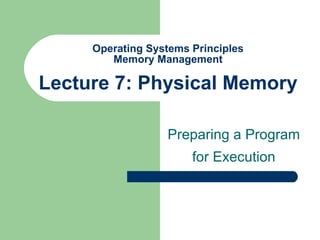
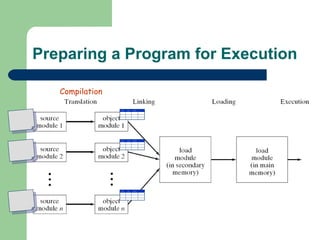
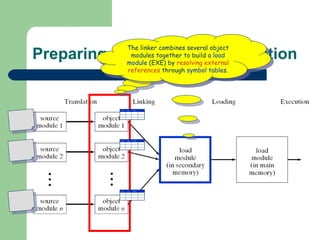
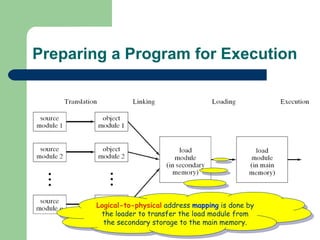
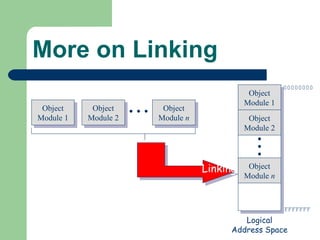
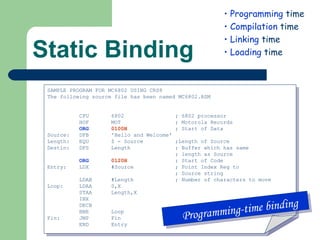
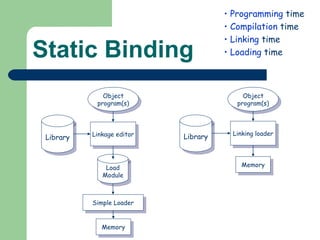
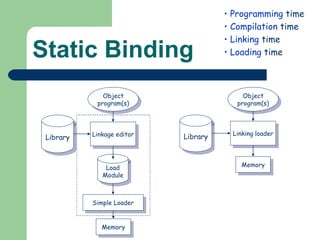
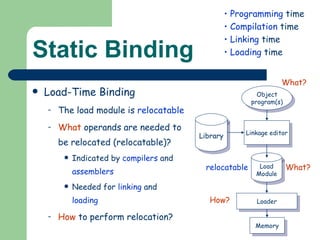
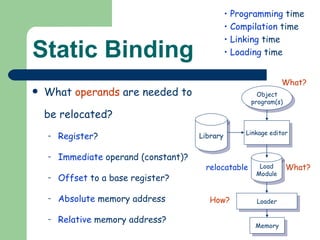
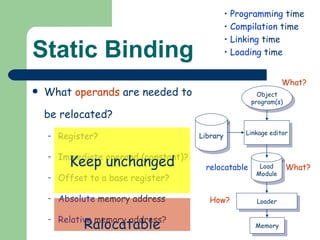
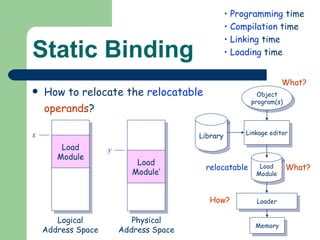
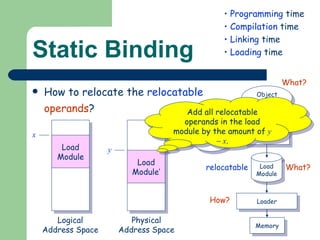
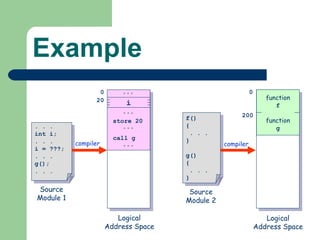
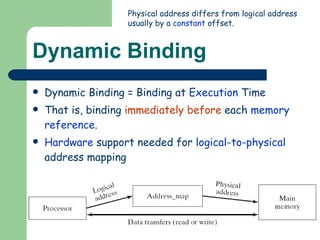
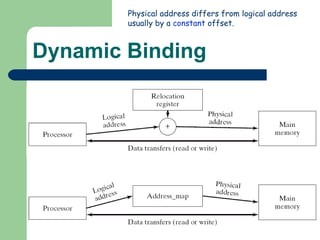
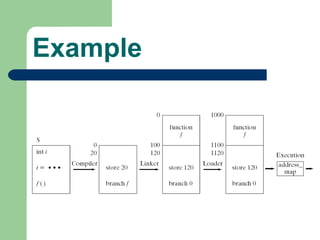
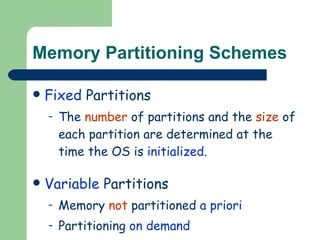
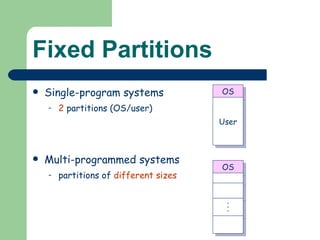
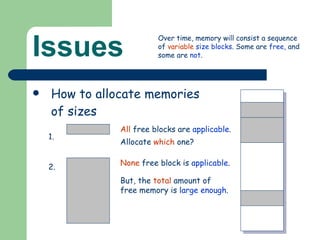
The document discusses different memory partitioning schemes used in operating systems. It describes fixed partitions where memory is divided into predetermined sized partitions at initialization time. It also describes variable partitions where memory is not pre-partitioned and is allocated on demand, which can cause external fragmentation. Dynamic binding is discussed where the logical to physical address mapping occurs at execution time with hardware support.

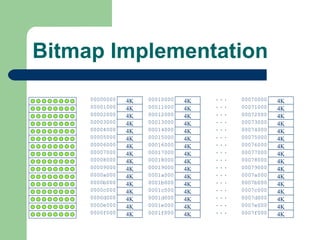
![Bitmap Implementation Memory divided into fix-size blocks Each block represented by a 0/1 bit in a binary string: the “ bitmap ” Can be implemented as char or int array Operations use bit masks Release : B[i] = B[i] & '11011111' Allocate : B[i] = B[i] | '11000000' Search : Repeatedly, Check left-most bit and Shift mask right: TEST = B[i] & '10000000' Free Allocated](https://image.slidesharecdn.com/os7-2-100818024451-phpapp01/85/Os7-2-49-320.jpg)
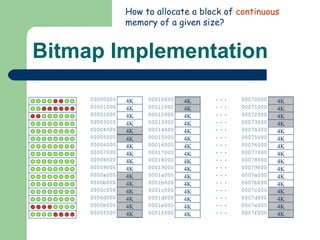
![Bitmap Implementation Memory divided into fix-size blocks Each block represented by a 0/1 bit in a binary string: the “ bitmap ” Can be implemented as char or int array Operations use bit masks Release : B[i] = B[i] & '11 0 11111' Allocate : B[i] = B[i] | ' 11 000000' Search : Repeatedly, Check left-most bit and Shift mask right: TEST = B[i] & ' 1 0000000'](https://image.slidesharecdn.com/os7-2-100818024451-phpapp01/85/Os7-2-50-320.jpg)