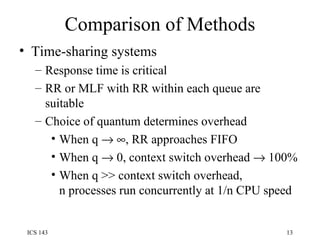
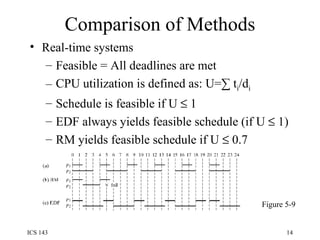
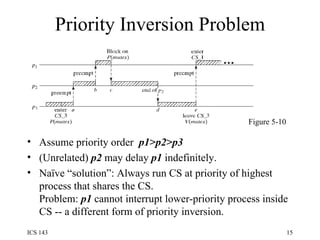
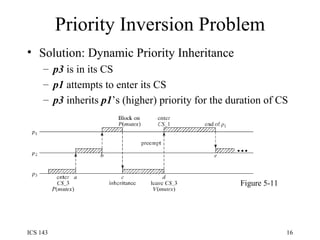
The document discusses various process and thread scheduling methods. It covers the organization of schedulers, common scheduling algorithms like priority scheduling, and comparisons of scheduling methods. It also describes the priority inversion problem and solution of dynamic priority inheritance to prevent lower priority processes from indefinitely blocking higher priority processes.
![Priority Scheduling Priority function returns numerical value P for process p : P = Priority(p) Static priority: unchanged for lifetime of p Dynamic priority: changes at runtime Priority divides processes into levels implemented as multi-level RL p at RL[ i ] run before q at RL[ j ] if i>j p, q at same level are ordered by other criteria](https://image.slidesharecdn.com/os5-100818024443-phpapp01/85/Os5-4-320.jpg)