Downloaded 114 times







![RED-BLACK TREES: INSERTION
Insertion: the basic idea
Insert x into tree, color x red
Only r-b property 3 might be violated (if p[x] red)
If so, move violation up tree until a place is found where it can
be fixed
Total time will be O(log n)](https://image.slidesharecdn.com/myredblack-160901124606/75/Red-Black-Tree-11-2048.jpg)
















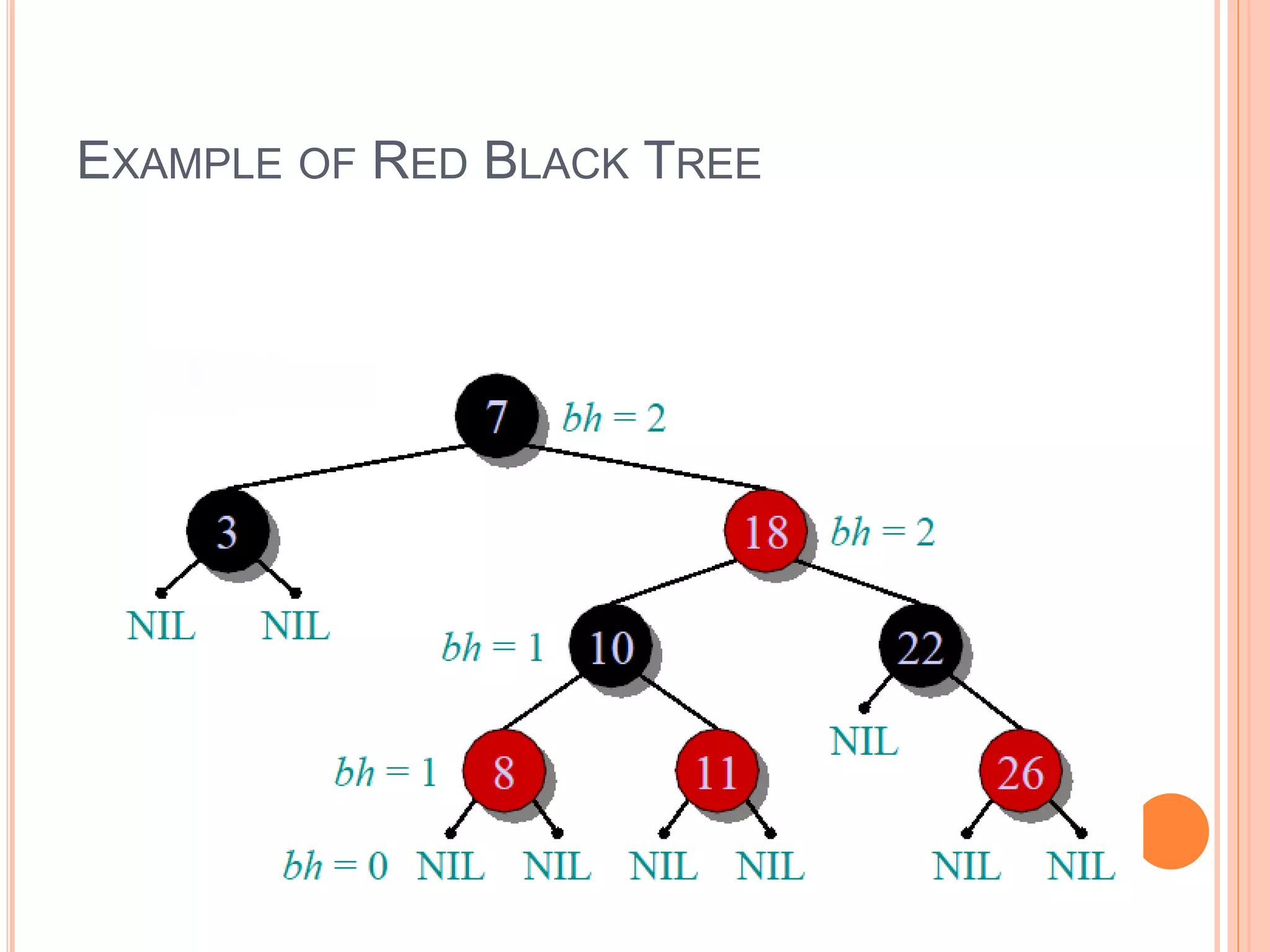
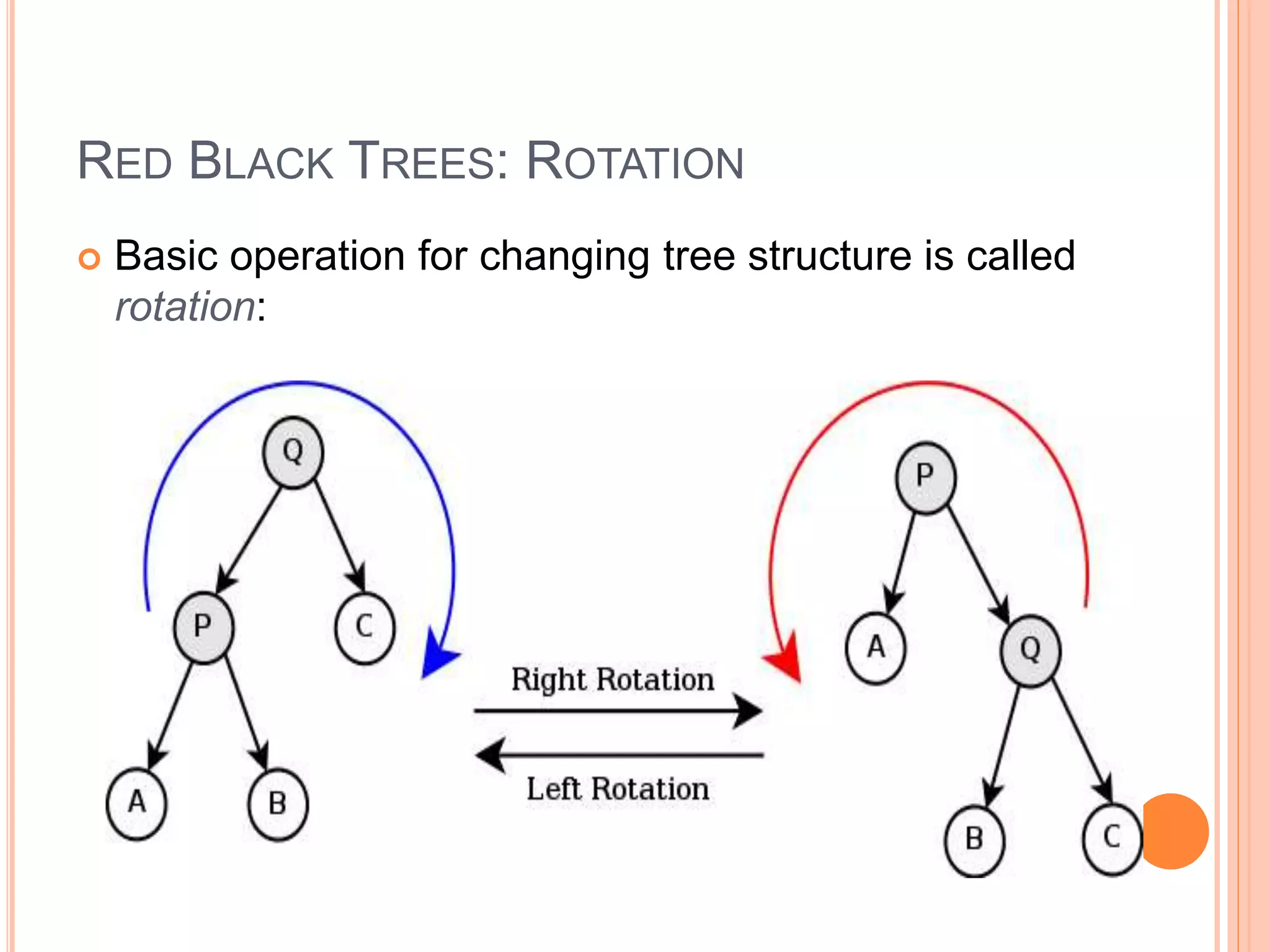
A red-black tree is a self-balancing binary search tree where each node is colored red or black. It provides logarithmic time bounds for search, insert, and delete operations. It achieves self-balancing by restricting the number of red nodes along any path, ensuring that no path is more than twice as long as any other path. Rotations are used during insertion and deletion operations to rebalance the tree and maintain these properties.