The document discusses secondary storage and magnetic disk structure. It provides details on:
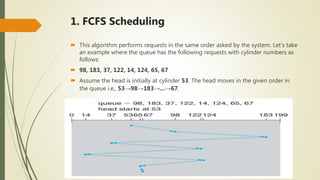
- Secondary storage devices like disks, tapes, and drives have non-volatile memory and are slower but cheaper than primary storage like RAM.
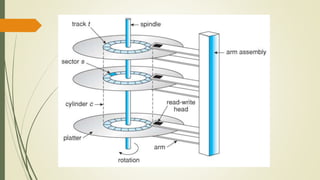
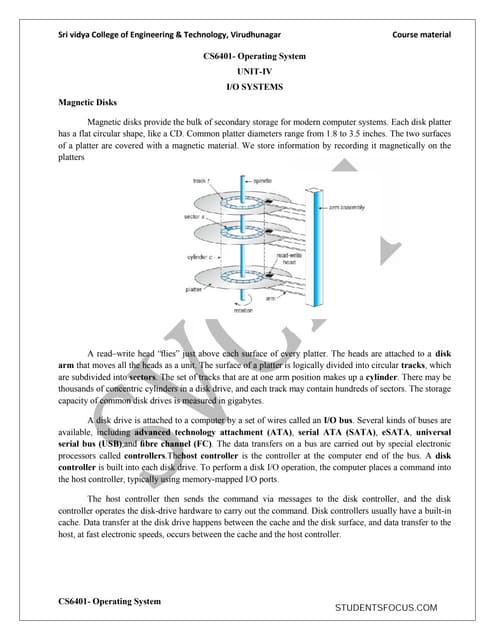
- Magnetic disks are divided into platters, tracks, cylinders, and sectors. Read/write heads access data locations specified by head, sector, cylinder addresses.
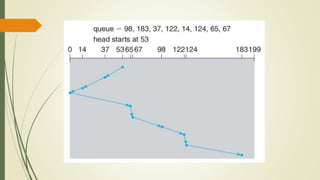
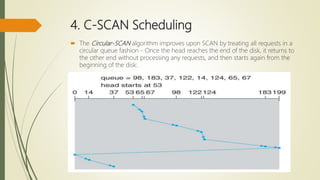
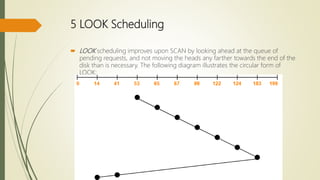
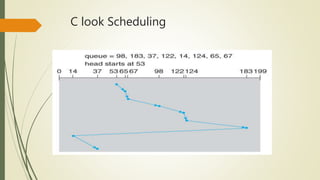
- Various disk scheduling algorithms like FCFS, SSTF, SCAN, C-SCAN, and LOOK are described which improve disk bandwidth and access time by processing requests in different orders.







































































![谷歌留痕技术教程[ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130173900-2eb784f9-thumbnail.jpg?width=640&height=640&fit=bounds)












