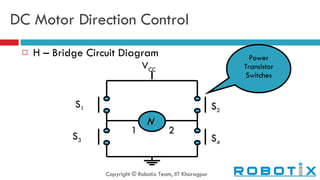
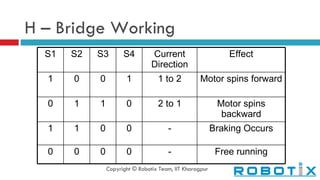
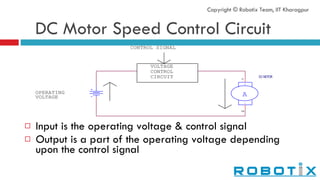
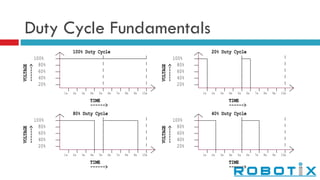
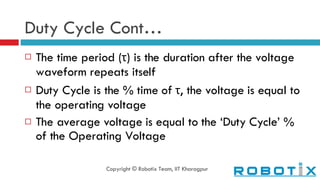
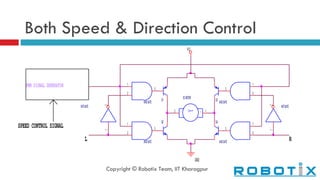
This document provides an overview of robotics motor drivers and DC motor control circuits. It discusses DC motor direction control using an H-bridge circuit and DC motor speed control using pulse width modulation (PWM). PWM allows modifying the duty cycle of a waveform based on a control voltage and is implemented using the 555 timer IC to control both the speed and direction of a DC motor.