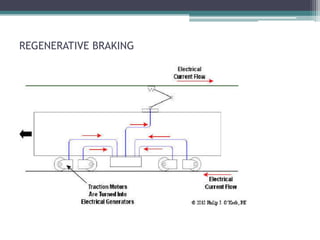
This document discusses traction motors, which provide rotational torque for conversion to linear motion. It covers requirements for traction systems, control methods for DC motors like electronic speed control using pulse width modulation, and braking operations. DC series motors are most suitable for traction due to power electronics control allowing methods like regenerative braking where motors feed energy back into the supply system.