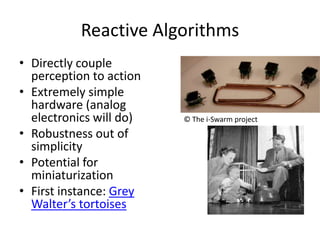
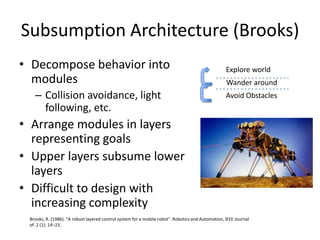
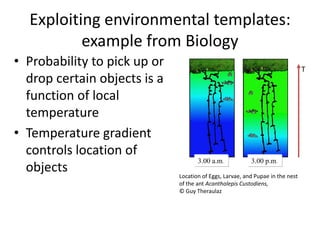
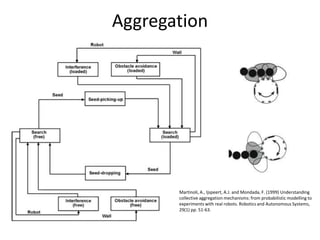
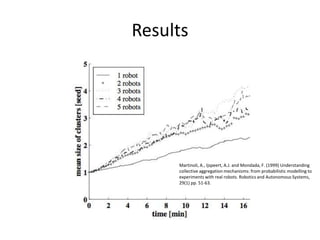
This document discusses reactive algorithms for multi-robot systems. Reactive algorithms directly couple perception to action using simple hardware. Examples of reactive algorithms discussed include Braitenberg vehicles and Brooks' subsumption architecture. Collaboration in reactive swarms can occur implicitly through environmental templates, where robots' probabilities of certain behaviors are functions of local environmental conditions, or explicitly through local communication between robots. Examples demonstrated include randomized coverage of turbine blades, stick pulling between two robots, and collective aggregation of objects.





![Robotic PlatformAlice miniature robot [Caprari2005]PIC microcontroller (368 bytes RAM, 8Kb FLASH)Length of 22mmMaximal speed of 4cm/s, stepper motors4 IR modules serve as very crude proximity sensors (3cm) and local communication devices Energetic autonomy 5h-10h](https://image.slidesharecdn.com/mondayaug31reactivealgorithms-090901180200-phpapp01/85/August-31-Reactive-Algorithms-I-11-320.jpg)













































![[Gp][1st seminar][presentation]](https://cdn.slidesharecdn.com/ss_thumbnails/gp1stseminarpresentation-130626163618-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)










![[Gp][final seminar][presentation]](https://cdn.slidesharecdn.com/ss_thumbnails/gpfinalseminarpresentation-130626164303-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)