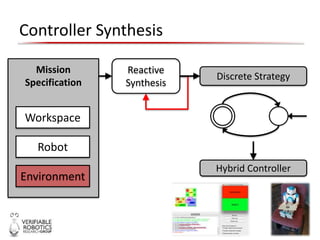
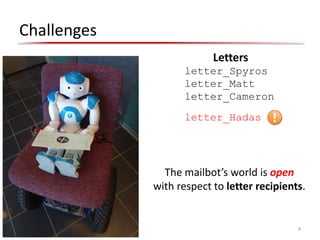
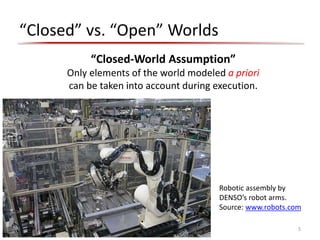
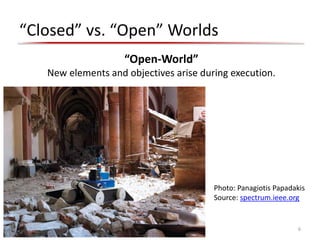
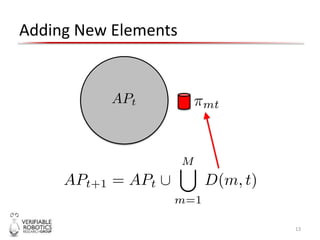
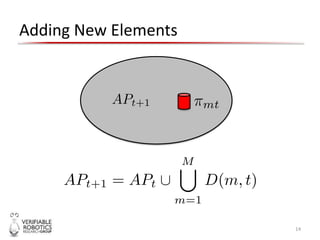
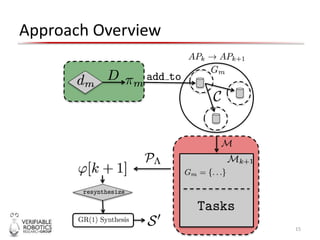
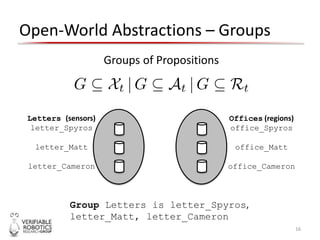
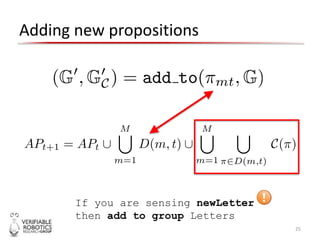
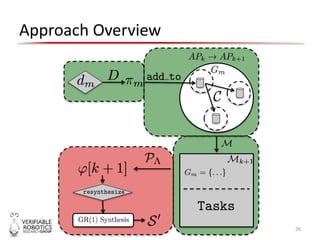
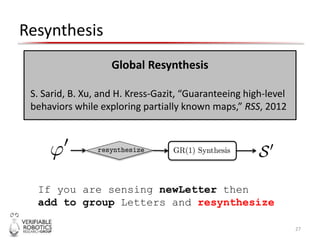
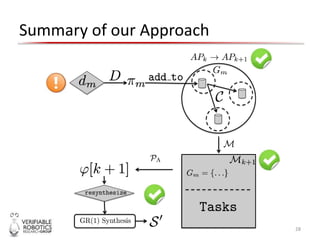
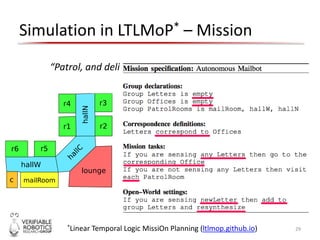


The document outlines the concept and implementation of open-world mission specifications for reactive robots, focusing on dynamic and unexpected environments where mission objectives can change during execution. It discusses the challenges associated with open-world scenarios, including the incorporation of new elements and the need for on-the-fly learning. The paper presents a framework for robot controllers that dynamically adapt and synthesize based on real-time conditions and objectives.
![[Yu cheng lin]cloud presentation - Raft](https://cdn.slidesharecdn.com/ss_thumbnails/yu-chenglincloudpresentation-raft-170817043111-thumbnail.jpg?width=640&height=640&fit=bounds)