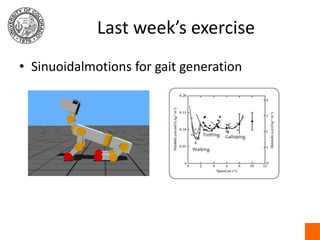
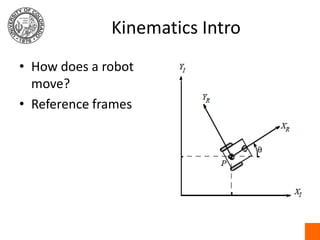
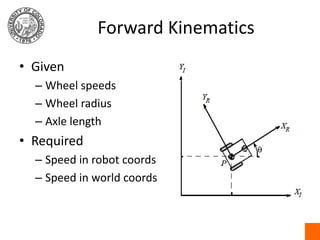
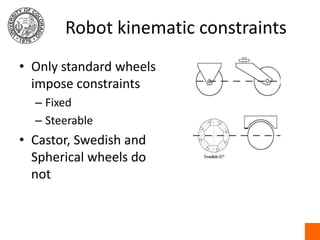
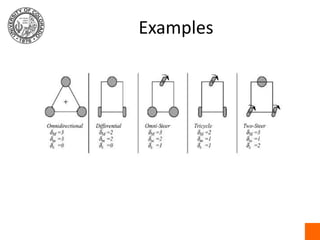
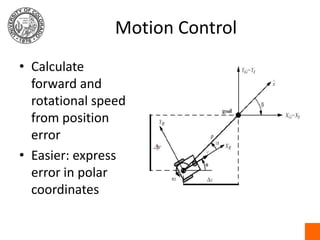
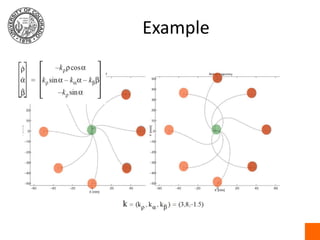
This document provides an introduction to robotics kinematics including forward kinematics, inverse kinematics, and maneuverability. It discusses calculating a robot's speed given its wheel speeds and geometry using forward kinematics, and determining required wheel speeds to achieve a desired speed using inverse kinematics. It also covers a robot's degree of mobility based on the number of independently controllable wheels and degree of steerability based on the number of independently steered wheels to determine its overall maneuverability. Examples are provided and the document concludes with assigning homework to read about forward kinematics and program a waypoint following robot.