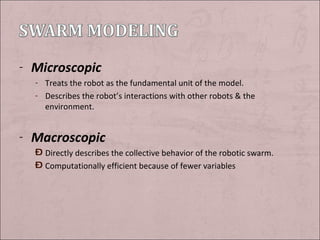
The document discusses swarm robots, including different types defined by size, communication range and topology. It describes how swarm robotics uses large numbers of simple robots that can collectively solve problems through local interactions. Examples of tasks include transportation, search and rescue. Challenges include scalability and performing physical tasks. Modeling approaches include microscopic and macroscopic, with the latter being more computationally efficient.