Downloaded 87 times
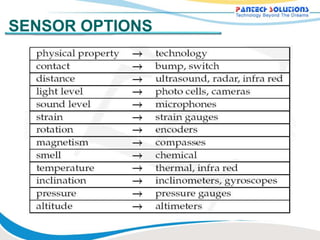
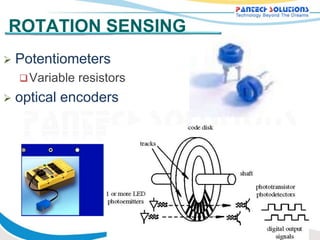
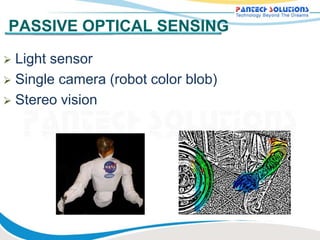
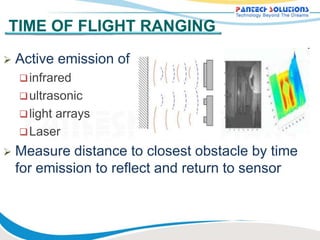
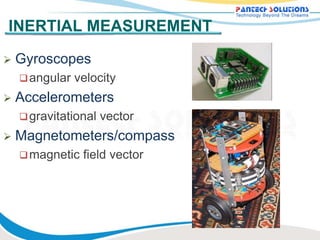


This document discusses the key components of robots and the technologies involved. It outlines that robots are generally made up of links, actuators, sensors, and controllers. It also describes some of the physical limitations in sensor and actuator technologies that robots face. Additionally, it provides examples of different sensor options like rotation sensing, passive optical sensing, time of flight ranging, and inertial measurement. The document concludes by listing various types of actuators used in robots.