Download as PDF, PPTX







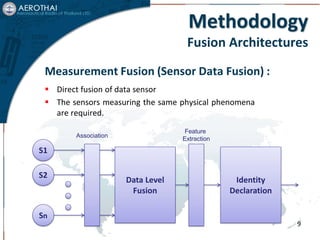

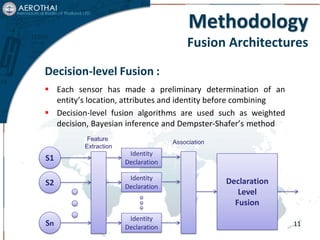

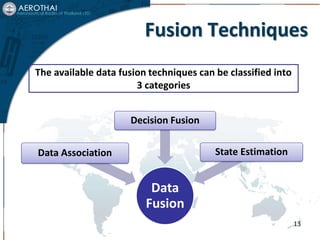























The document provides a detailed overview of multi-sensor data fusion (MDF) methodologies, techniques, and applications in air traffic control (ATC) and military contexts. It highlights the advantages of MDF over single sensor systems and discusses various fusion architectures, including measurement, feature-level, and decision-level fusion. The document also addresses current works, challenges, and future directions in enhancing data fusion systems and algorithms.

































































![ict_presentation_final_final_final[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ictpresentationfinalfinalfinal1-251230145259-2b4839bd-thumbnail.jpg?width=640&height=640&fit=bounds)










