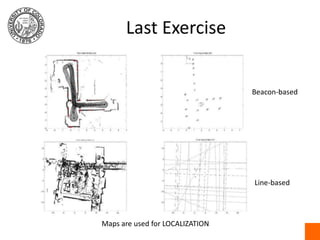
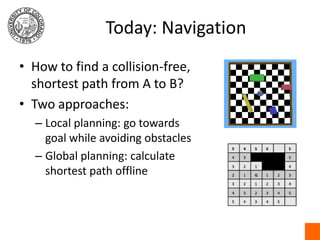
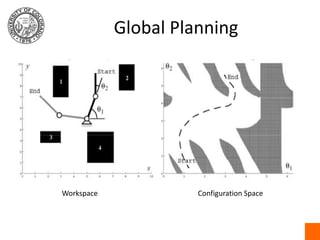
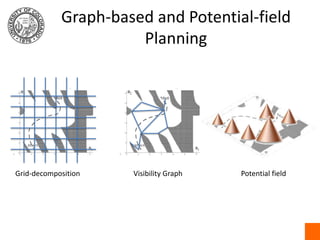
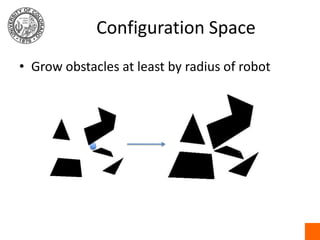
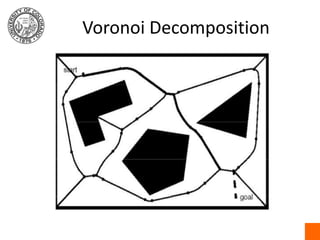
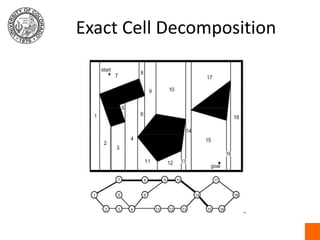
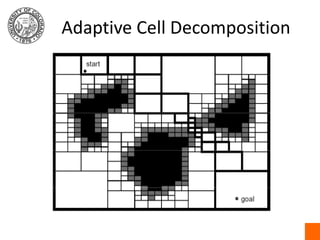
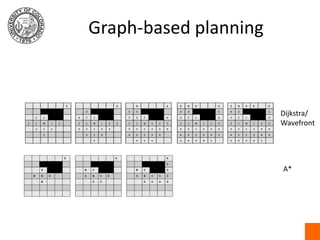
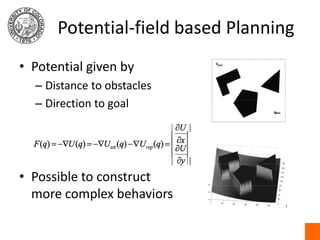
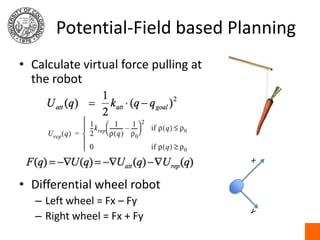
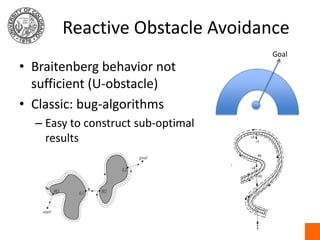
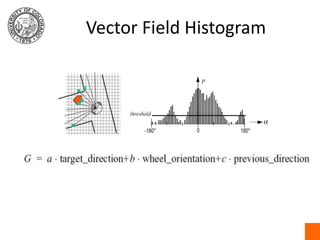
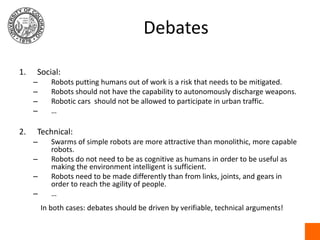
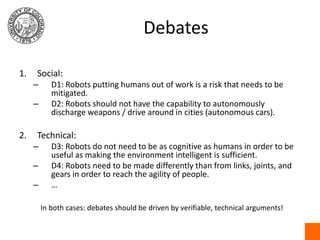
This document discusses navigation techniques for robots. It begins by reviewing localization methods like Markov localization and Kalman filters. It then discusses two approaches for navigation - local planning, which involves moving towards a goal while avoiding obstacles, and global planning, which calculates an offline shortest path. Various global planning techniques are described, including graph-based methods like Dijkstra's and A* algorithms, as well as cell decomposition and potential field planning. Potential field planning calculates a virtual force pulling the robot based on distance to obstacles and goal direction. The document concludes by discussing debates around social and technical topics related to robotics.
















![[Paper research] GOSELO: for Robot navigation using Reactive neural networks](https://cdn.slidesharecdn.com/ss_thumbnails/20190430goseloreactiveneuralnetworks-190430153532-thumbnail.jpg?width=640&height=640&fit=bounds)