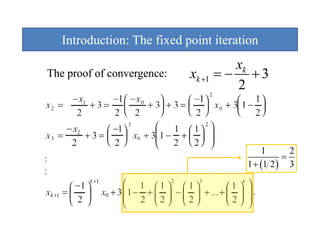
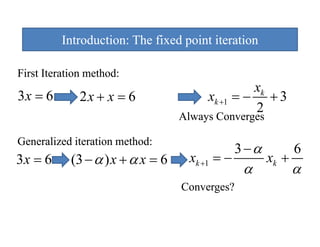
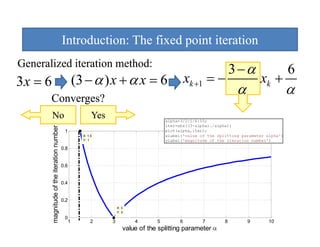
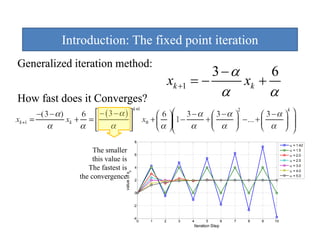
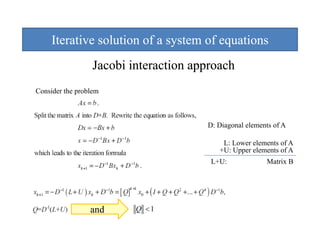
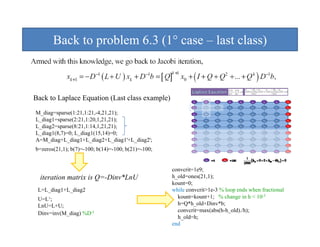
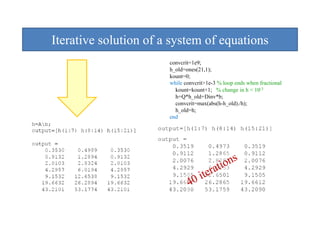
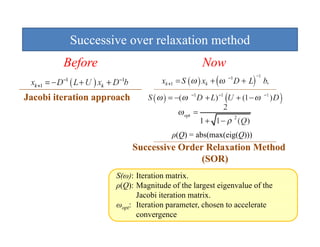
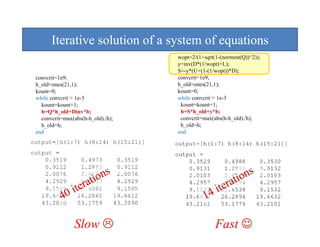
This document discusses iterative methods for solving systems of equations. It introduces the Jacobi iteration method and the Successive Over-Relaxation (SOR) method. SOR can accelerate the convergence compared to Jacobi by introducing an optimal relaxation parameter. Pseudocode is provided to implement SOR to iteratively solve a system of equations until the solution converges within a specified tolerance.