Downloaded 67 times

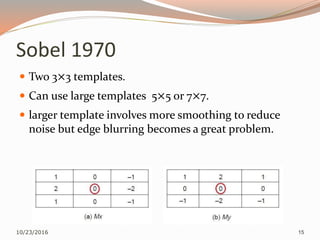
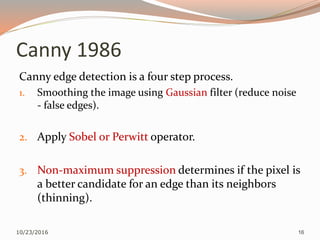
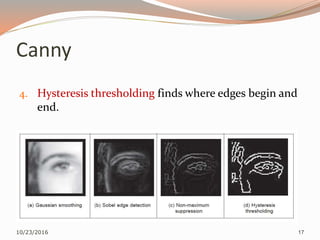
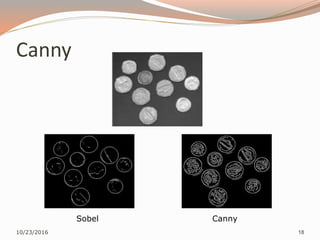

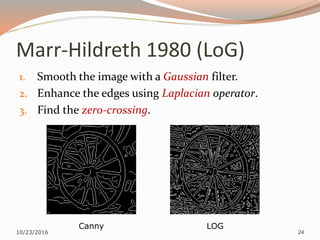
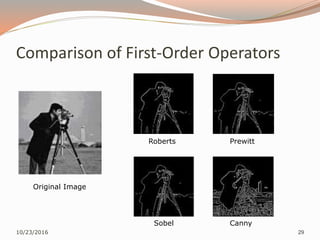
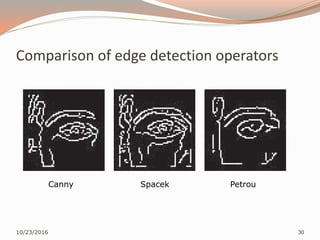
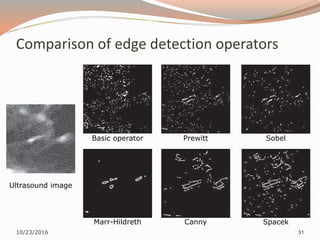
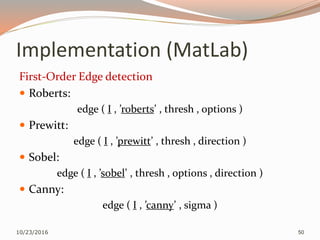
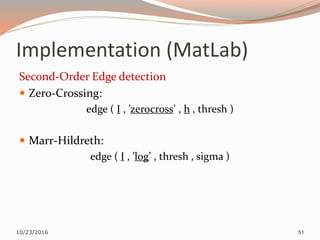


The document provides a comprehensive overview of edge detection techniques and algorithms used in image processing, including first-order methods (like Roberts, Prewitt, Sobel, and Canny) and second-order methods (like zero-crossing and Marr-Hildreth). It details the steps involved in each method, evaluates their performance, and discusses approaches for motion detection using image differencing and optical flow. Additionally, it includes implementation guidance for these techniques in MATLAB.