Downloaded 394 times


![Quantize the parameter space (a,b), that is, divide
it into cells.
This quantized space is often referred to as the
accumulator cells.
In the figure in the next slide a(min) is the
minimal value of a cell.
Count the number of times a line intersects a
given cell.
– For each point (x,y) with value 1 in the binary
image, find the values of (a,b) in the range
[a(min),a(max)],[b(min),b(max)] defining the line
corresponding to this point.](https://image.slidesharecdn.com/houghtransformmoushumizaman-150129135749-conversion-gate01/85/Hough-Transform-By-Md-Nazmul-Islam-20-320.jpg)

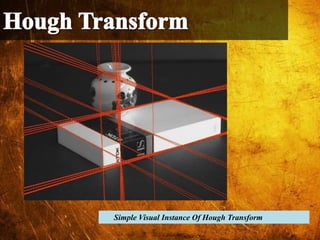
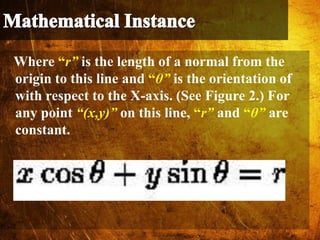
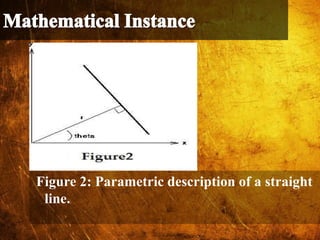
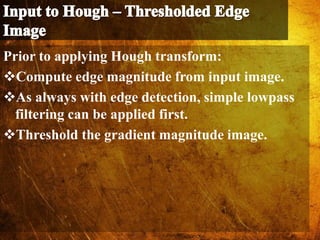
The Hough transform is a feature extraction technique used in image analysis and computer vision to detect shapes within images. It works by detecting imperfect instances of objects of a certain class of shapes via a voting procedure. Specifically, the Hough transform can be used to detect lines, circles, and other shapes in an image if their parametric equations are known, and it provides robust detection even under noise and partial occlusion. It works by quantizing the parameter space that describes the shape and counting the number of votes each parametric description receives from edge points in the image.