Downloaded 199 times
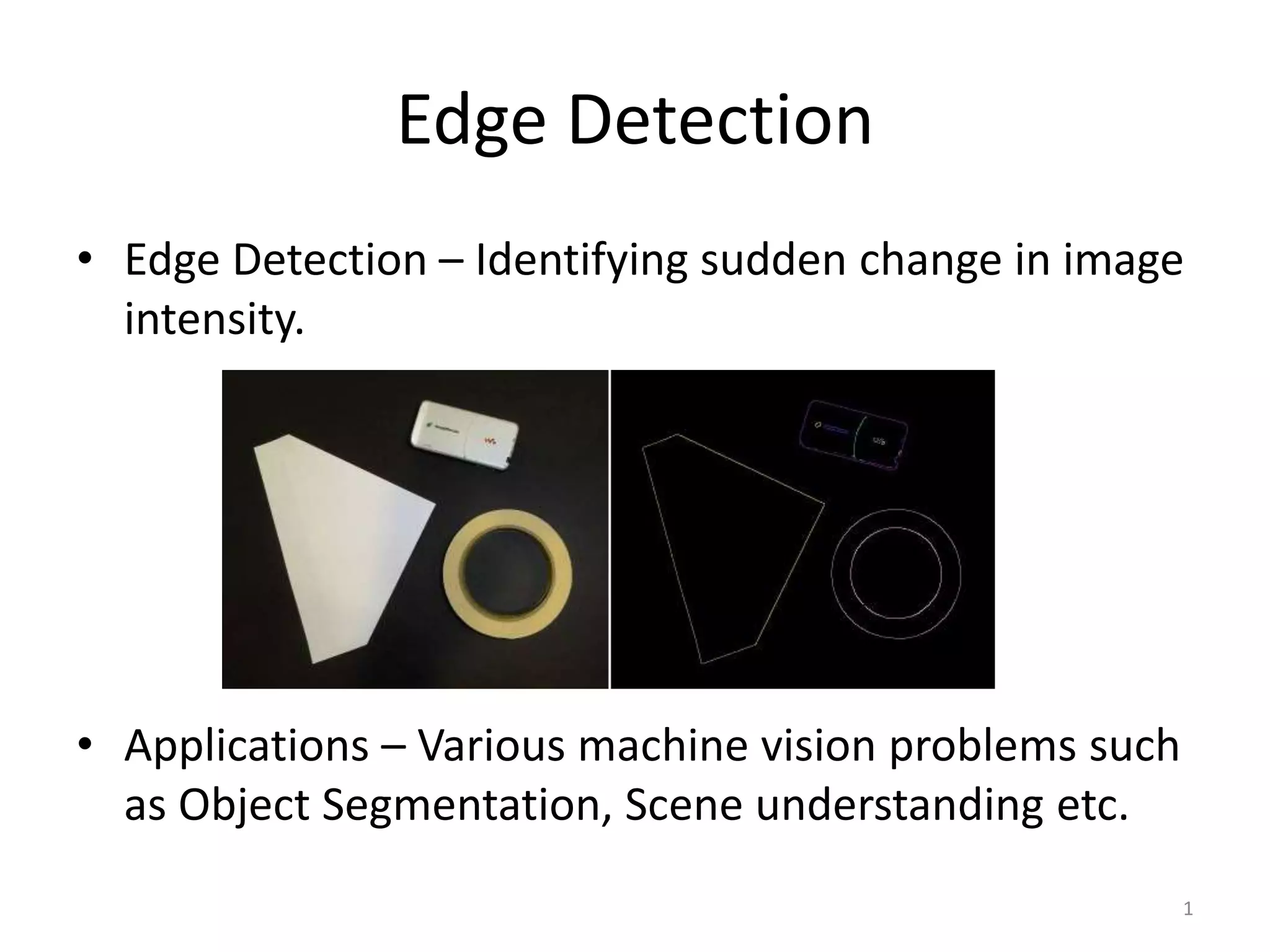
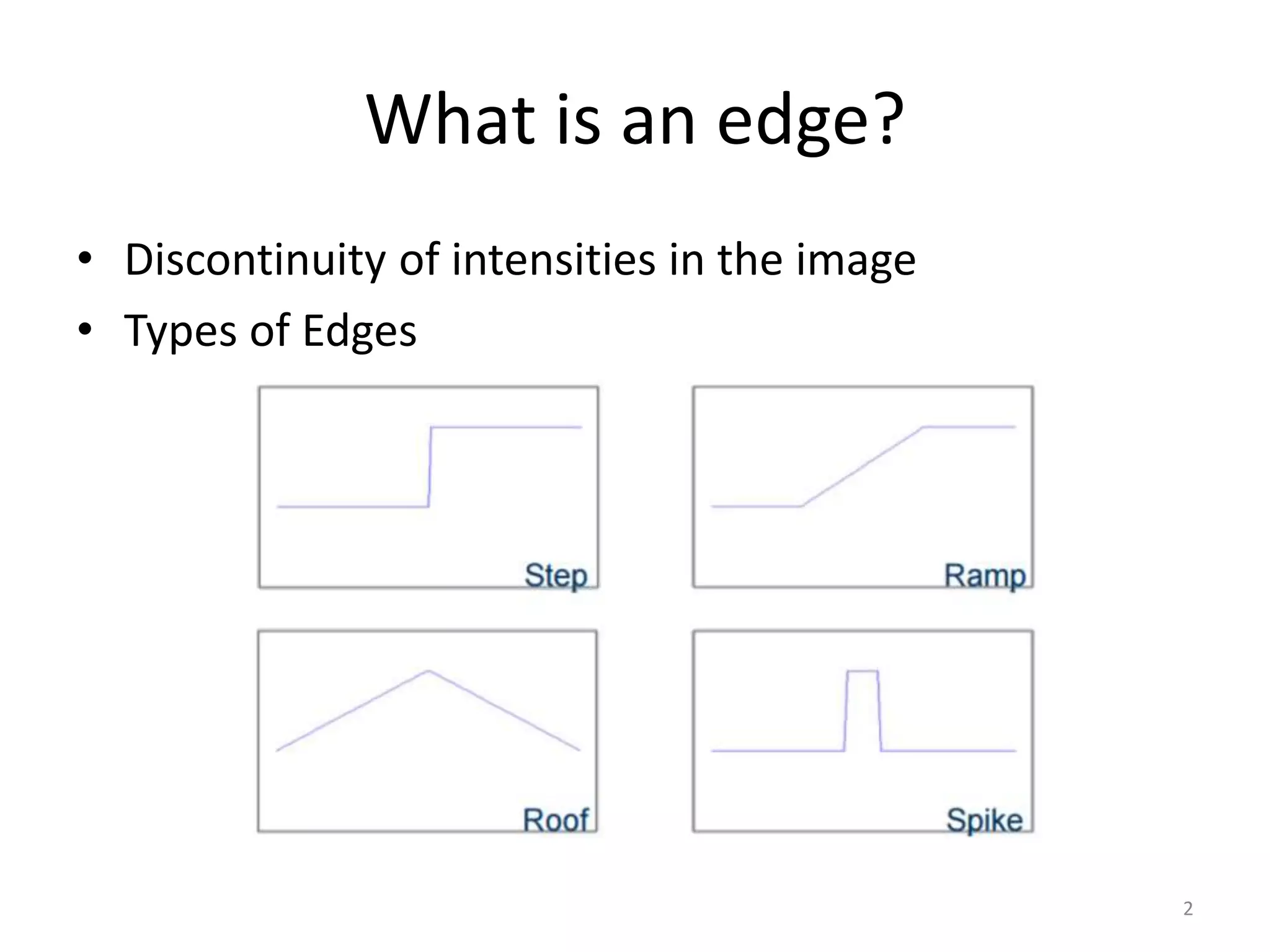
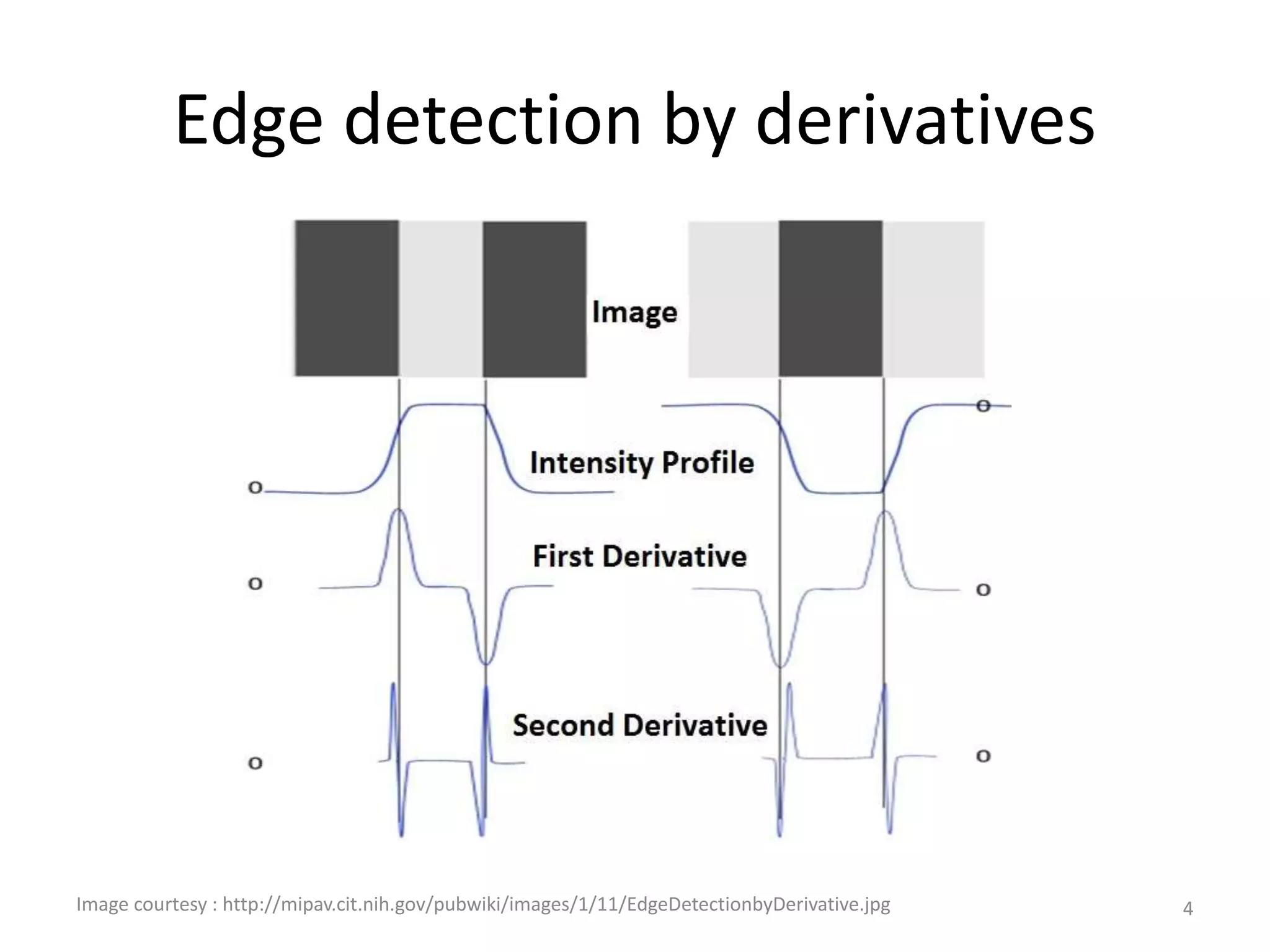
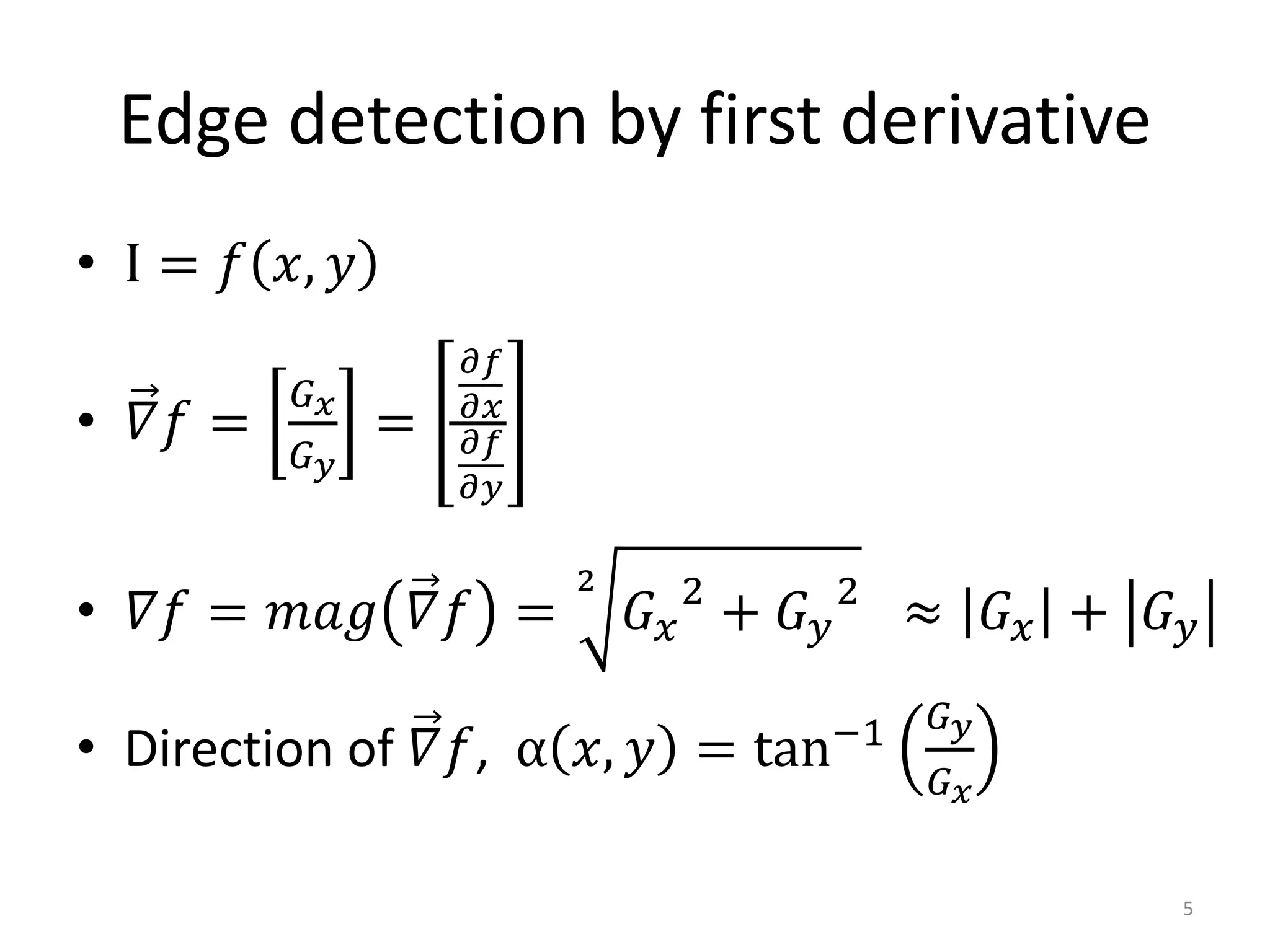
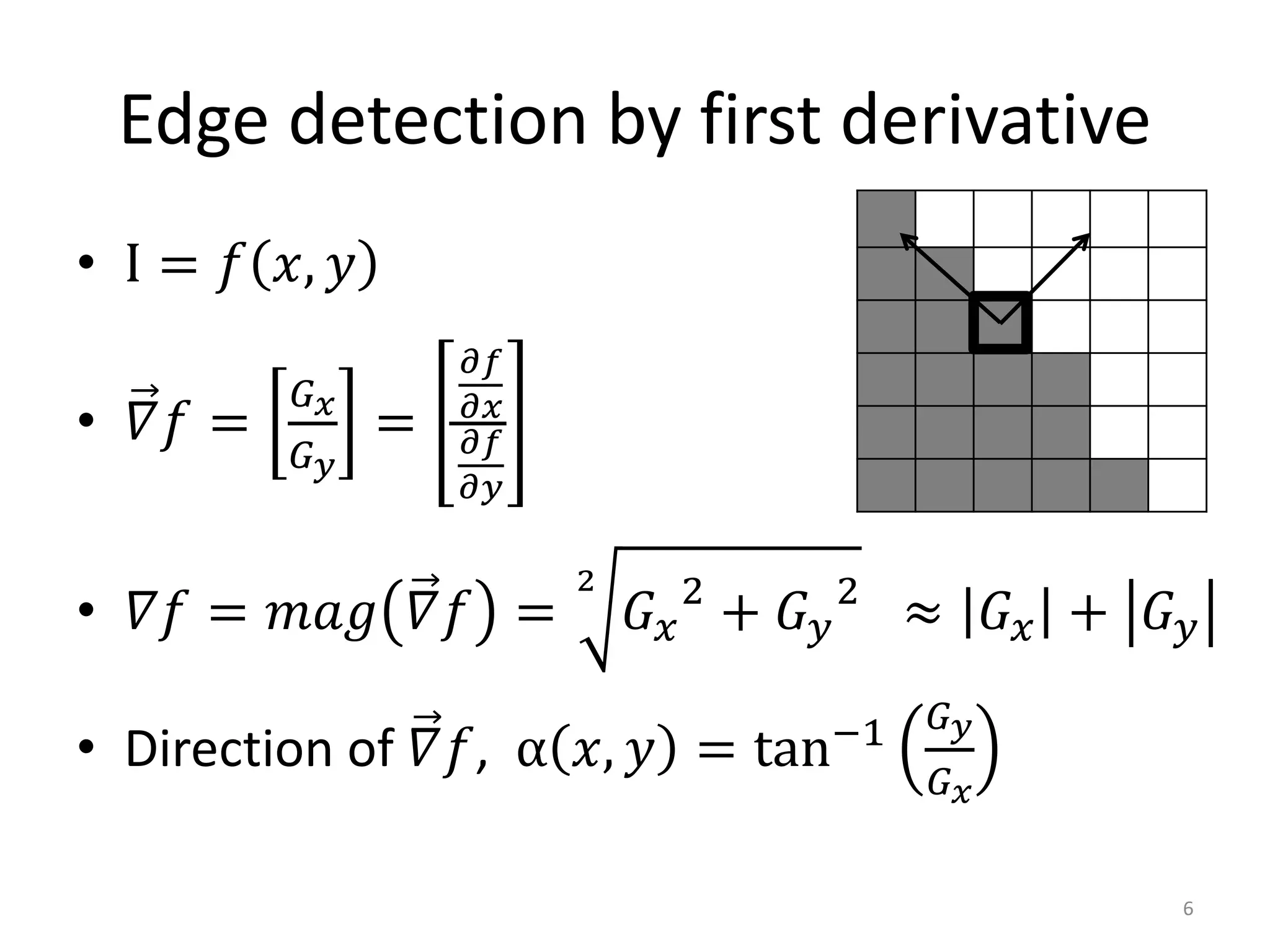
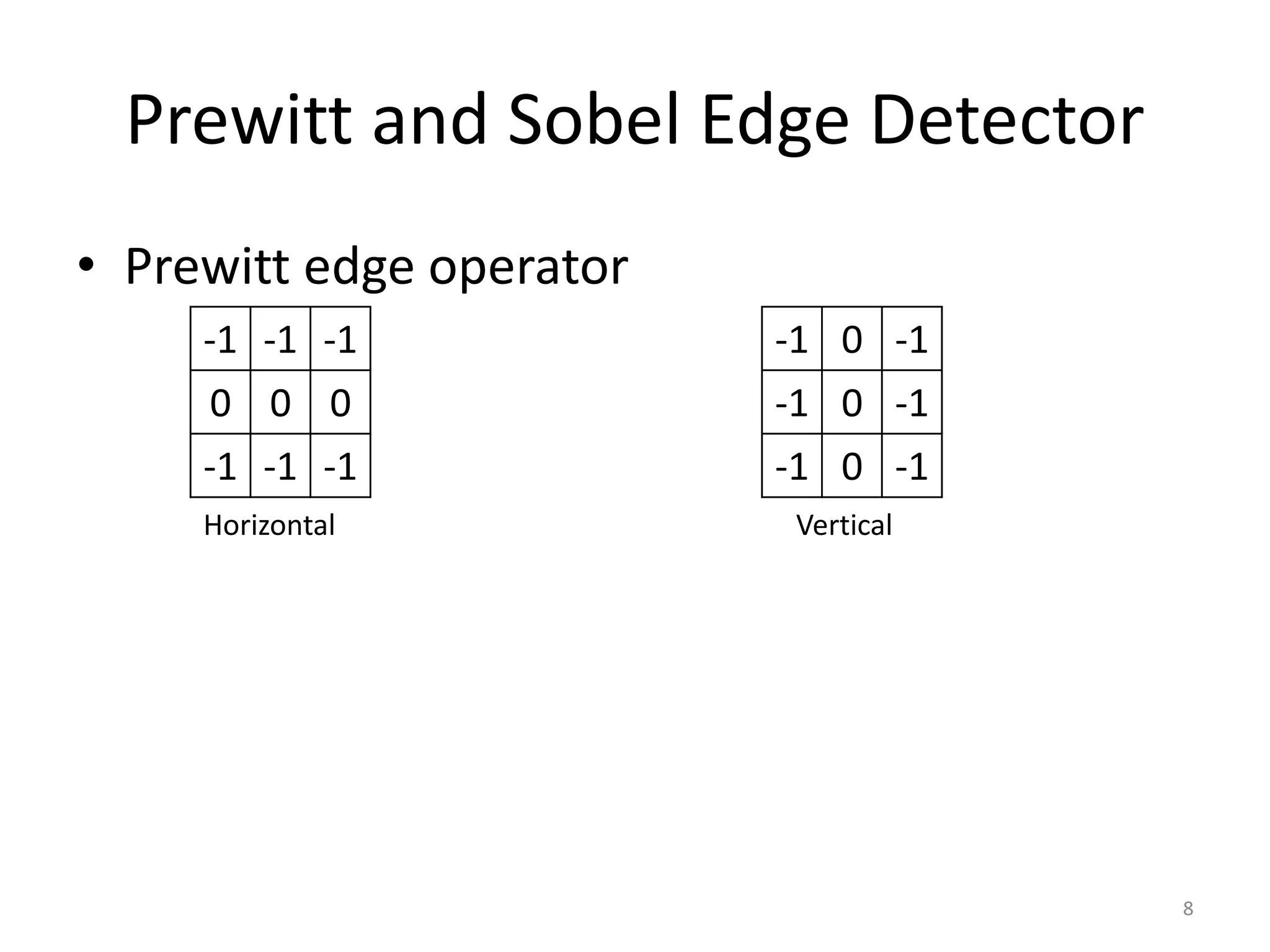
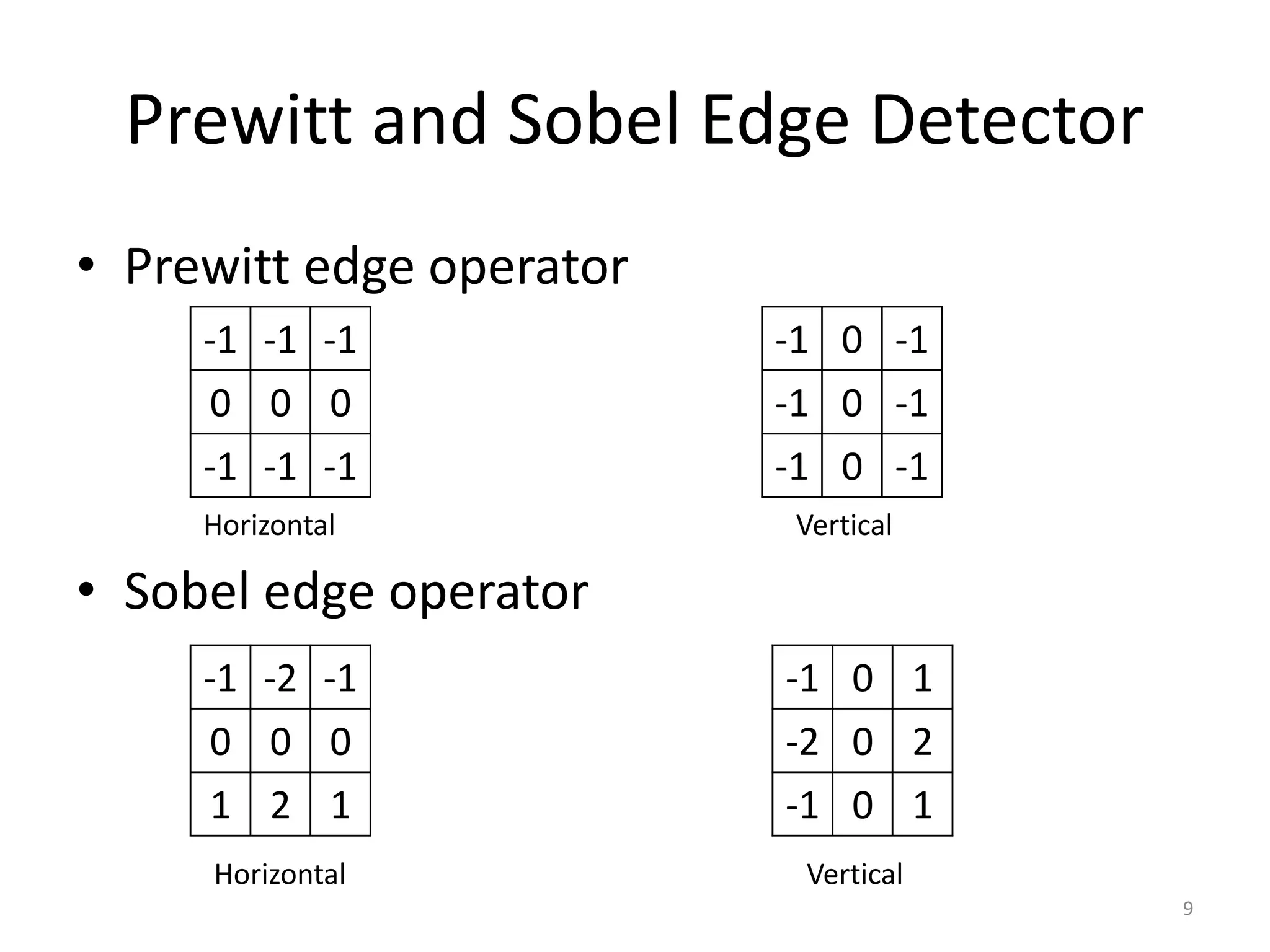
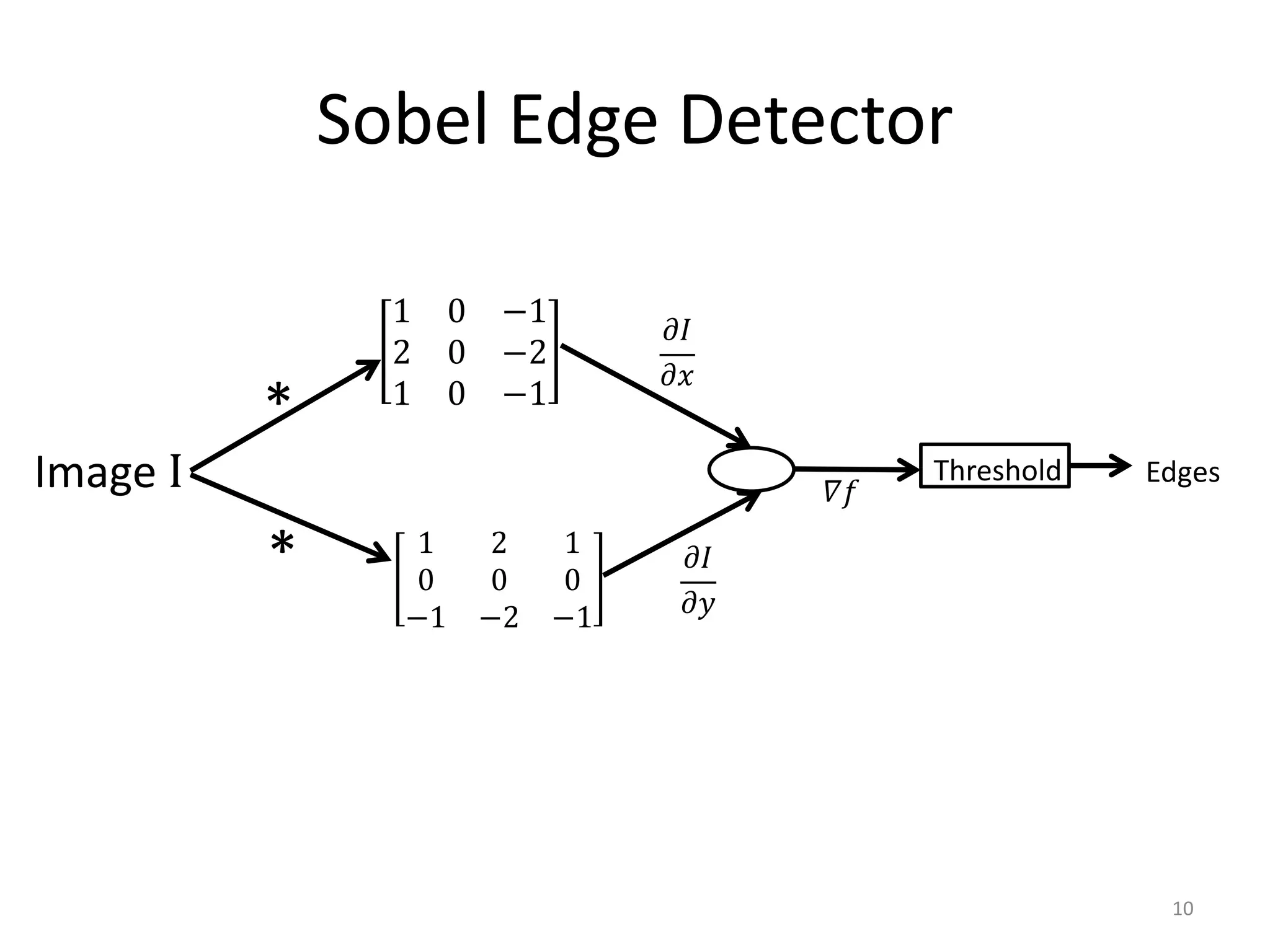
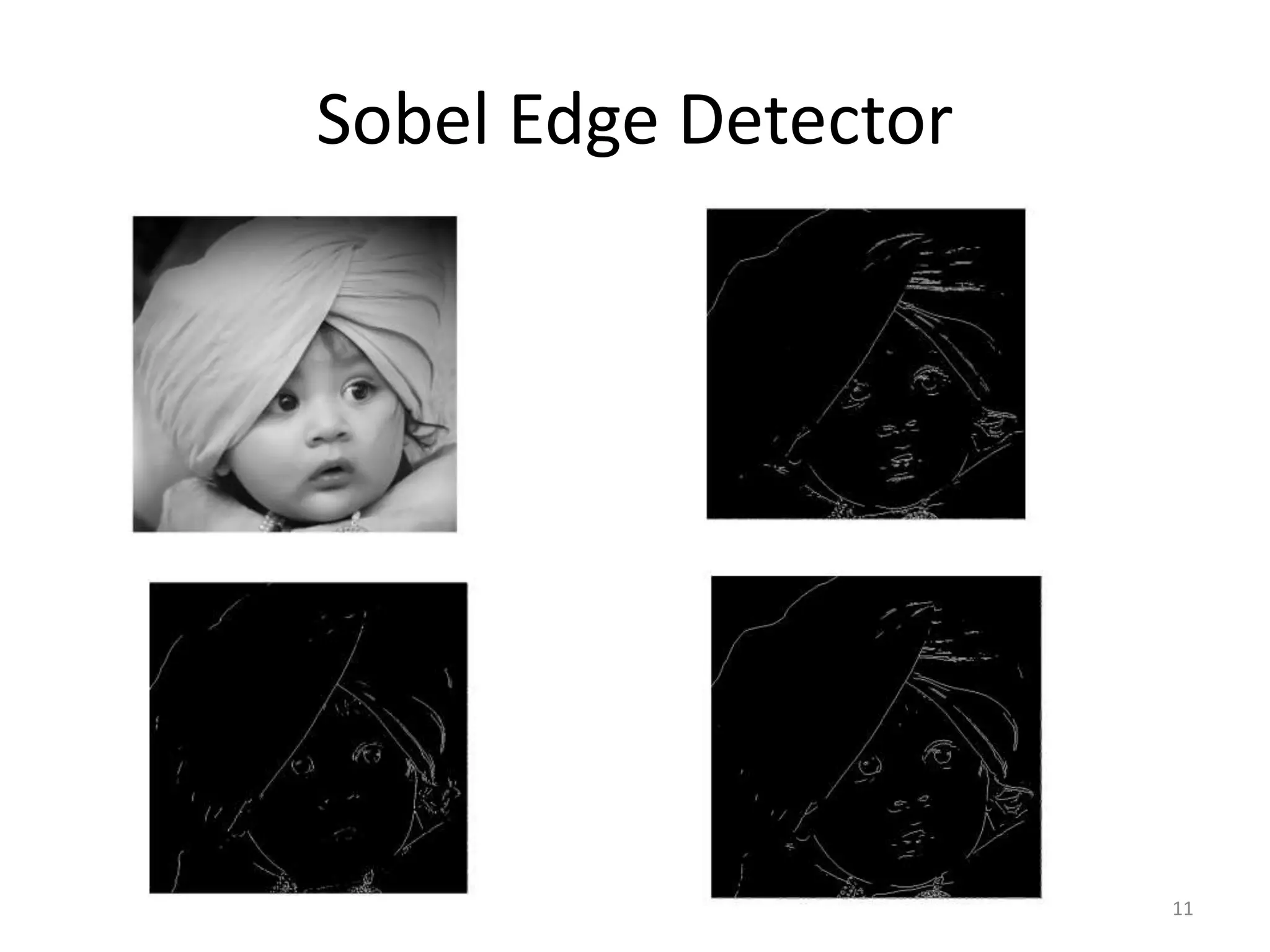
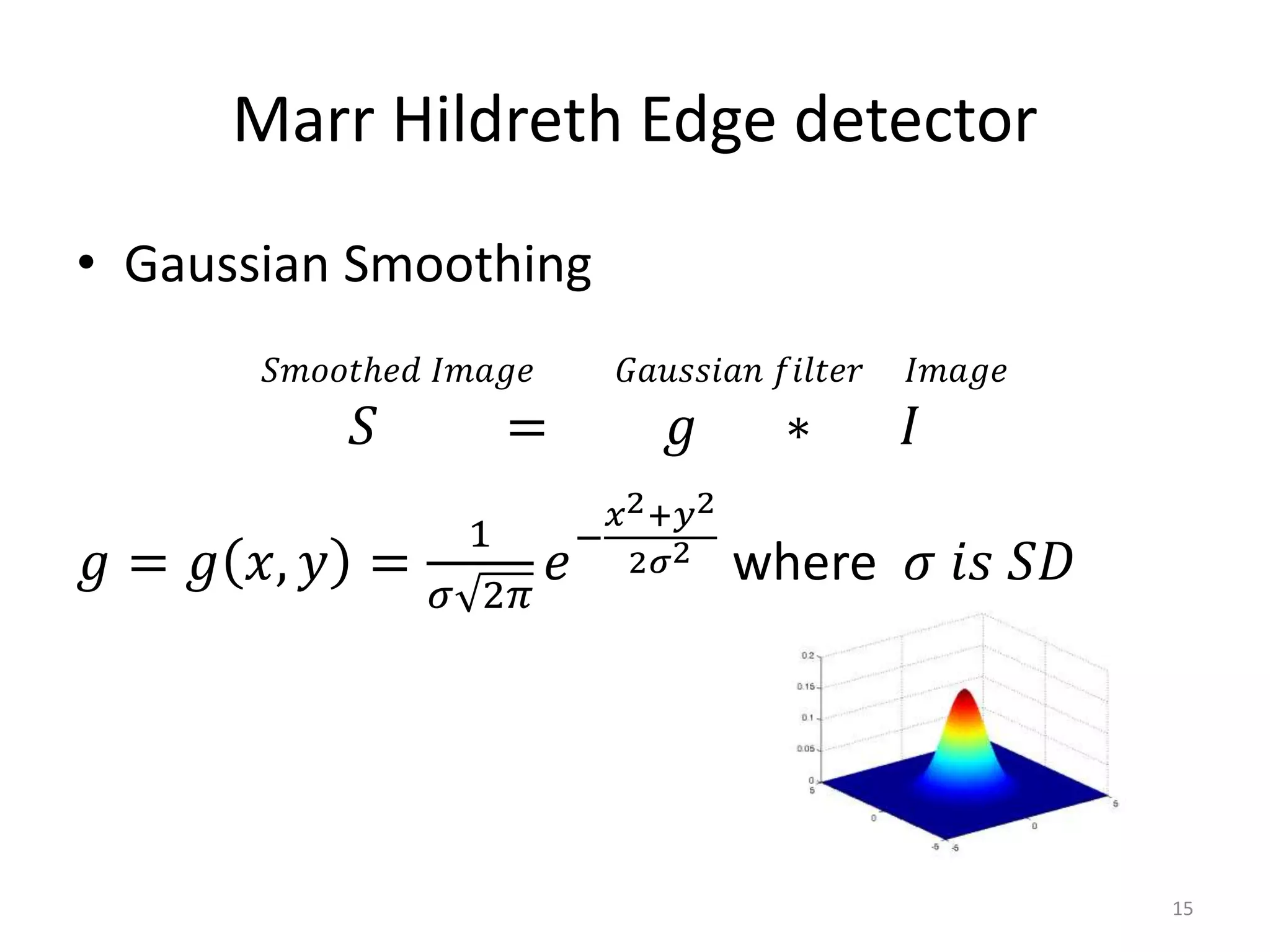
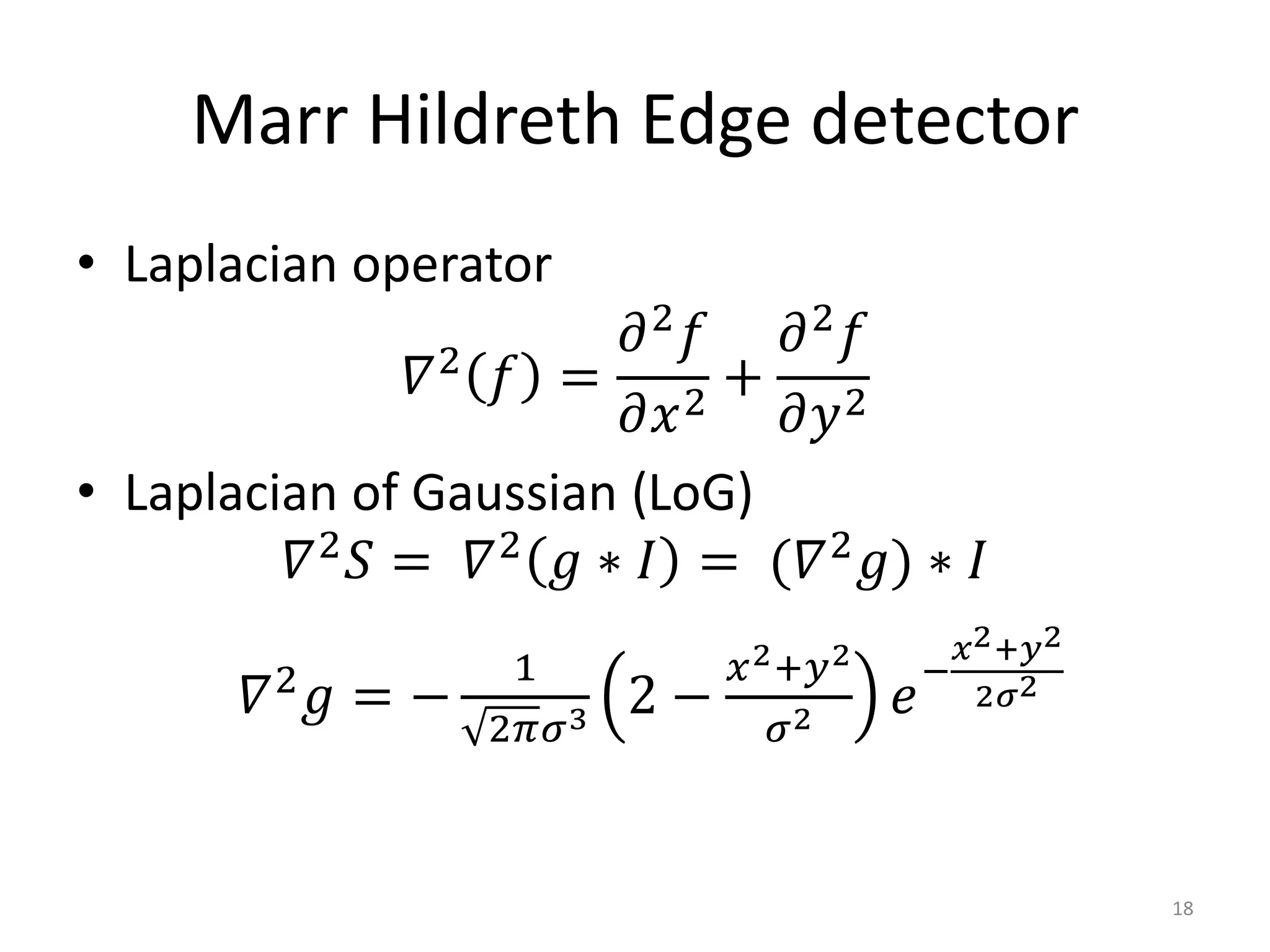
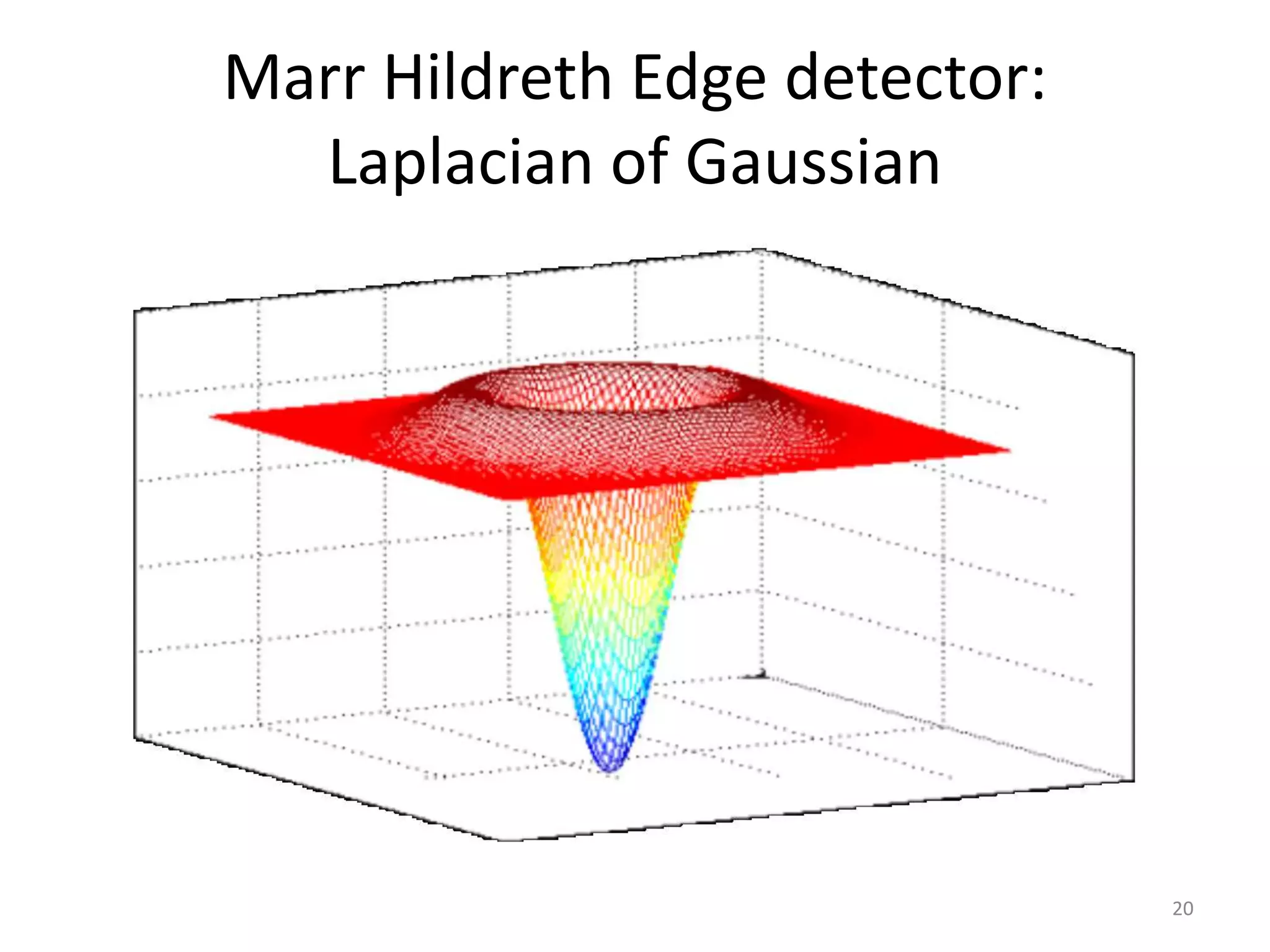
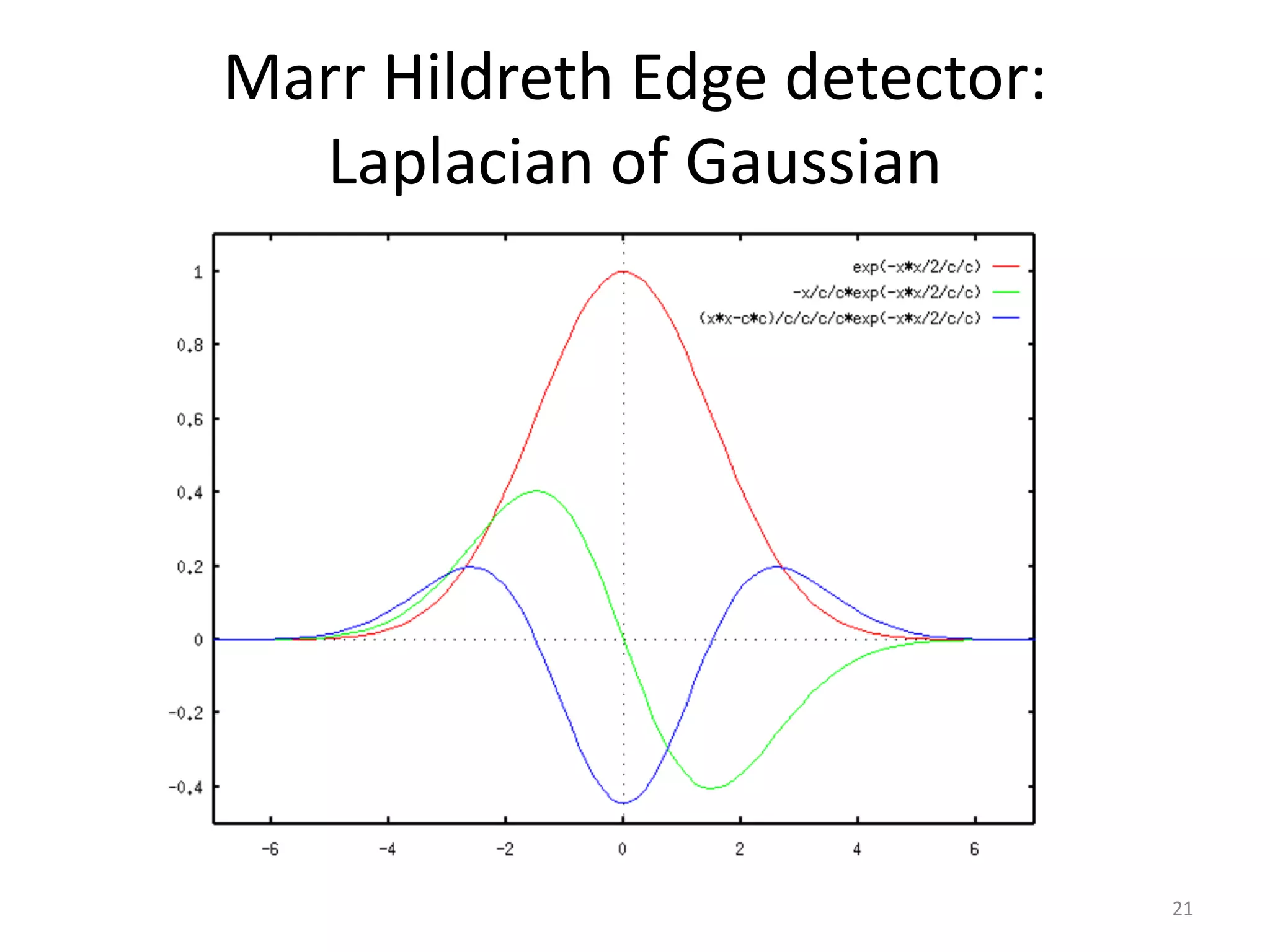
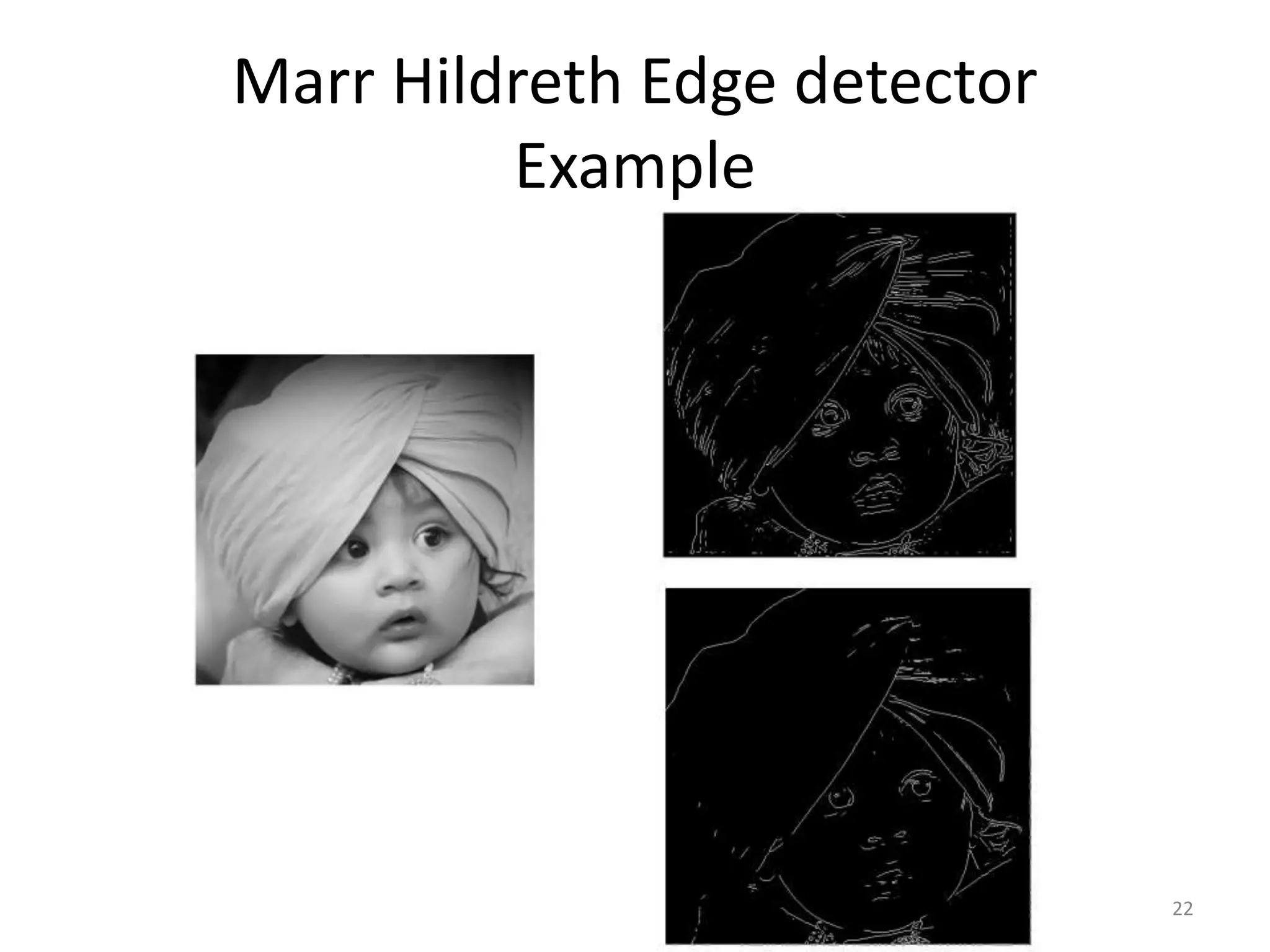
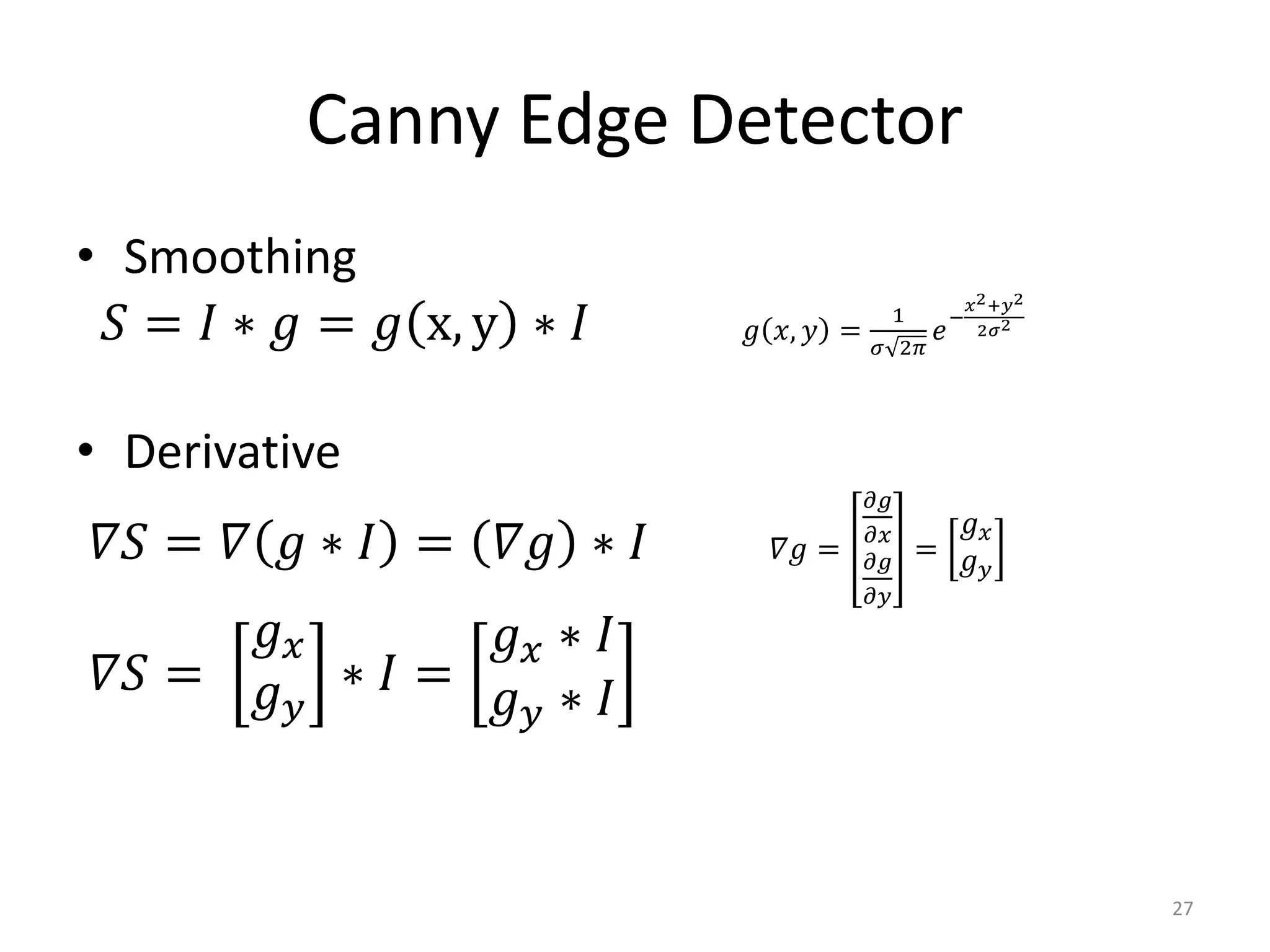
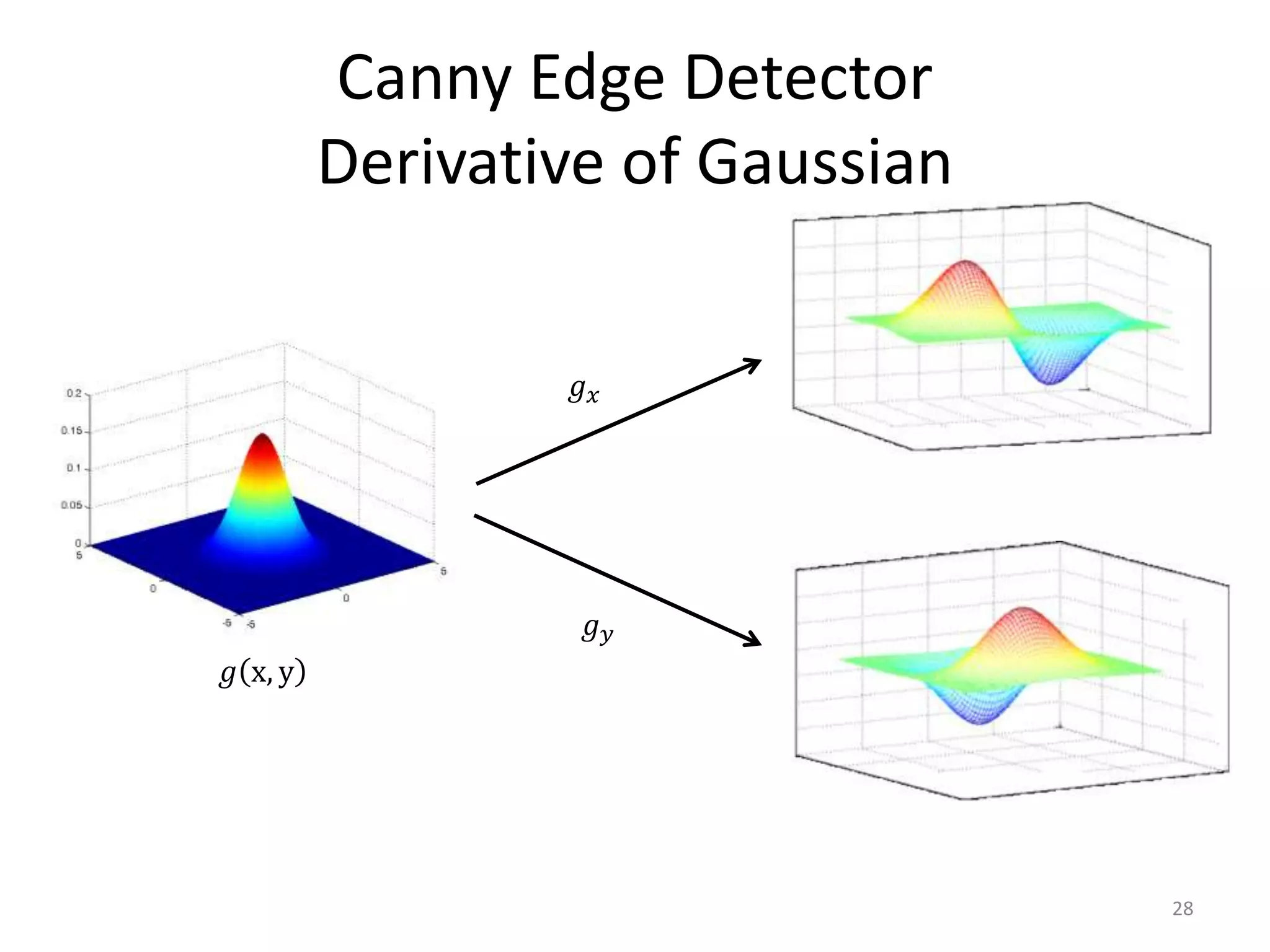
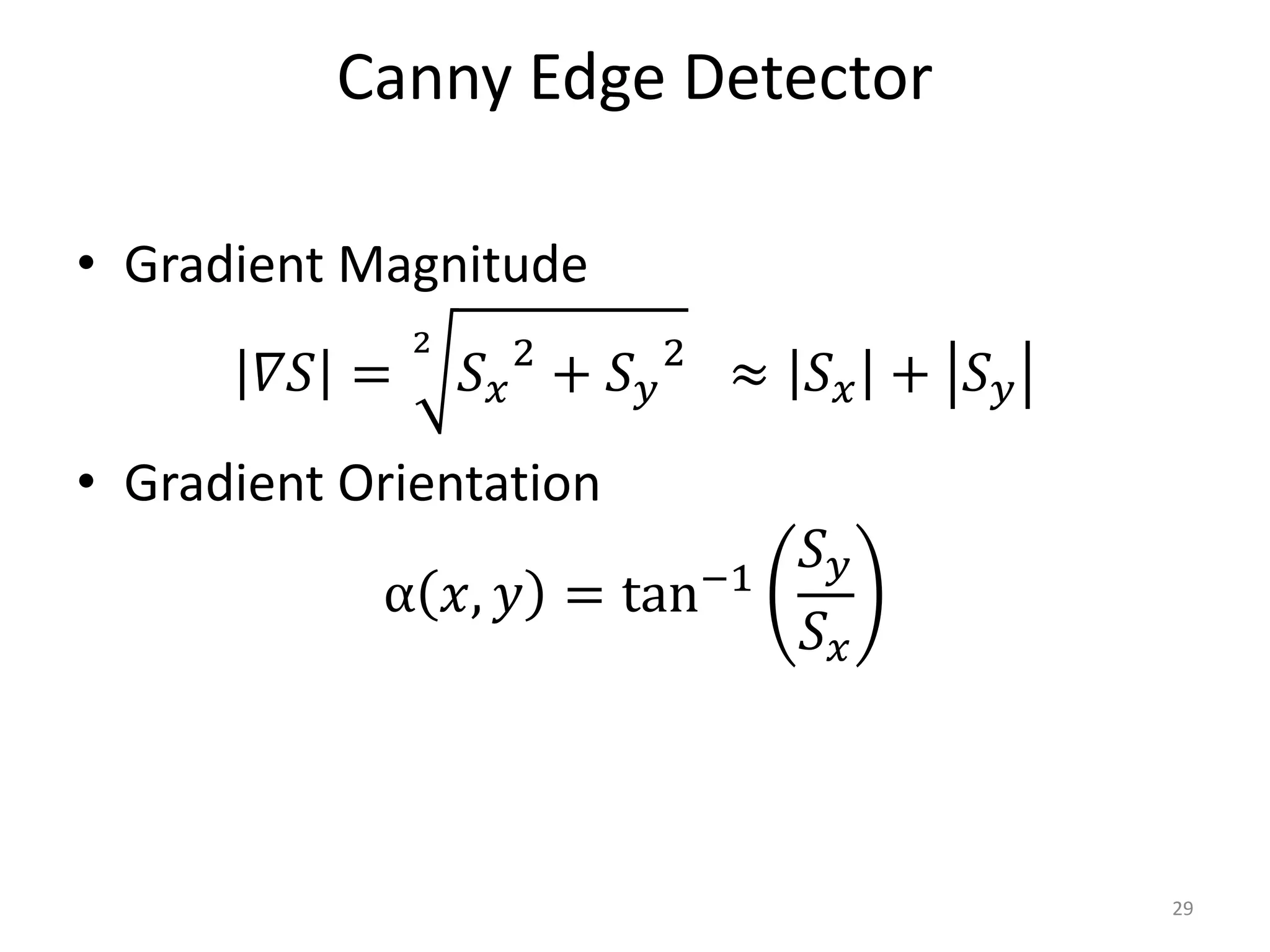
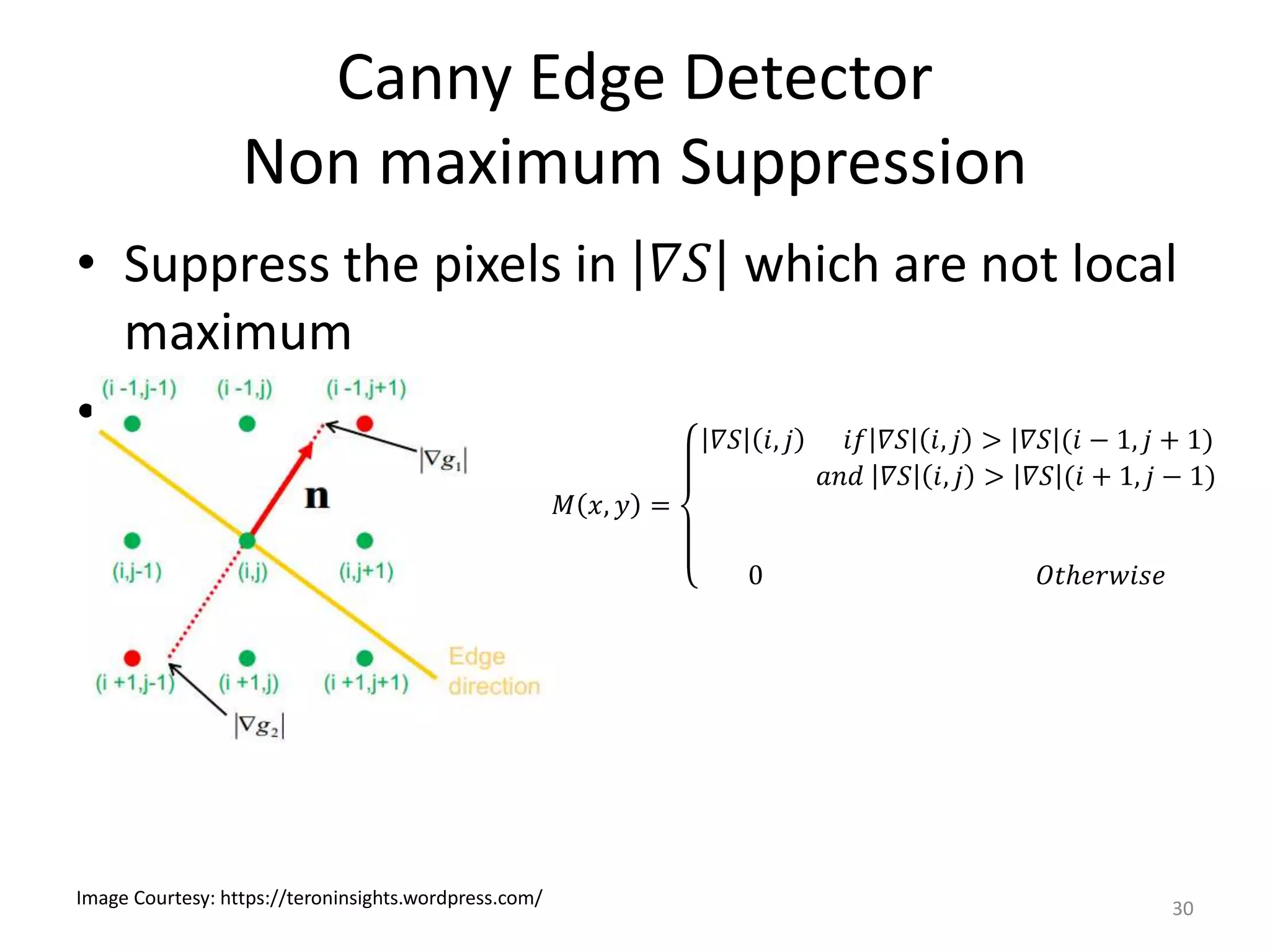
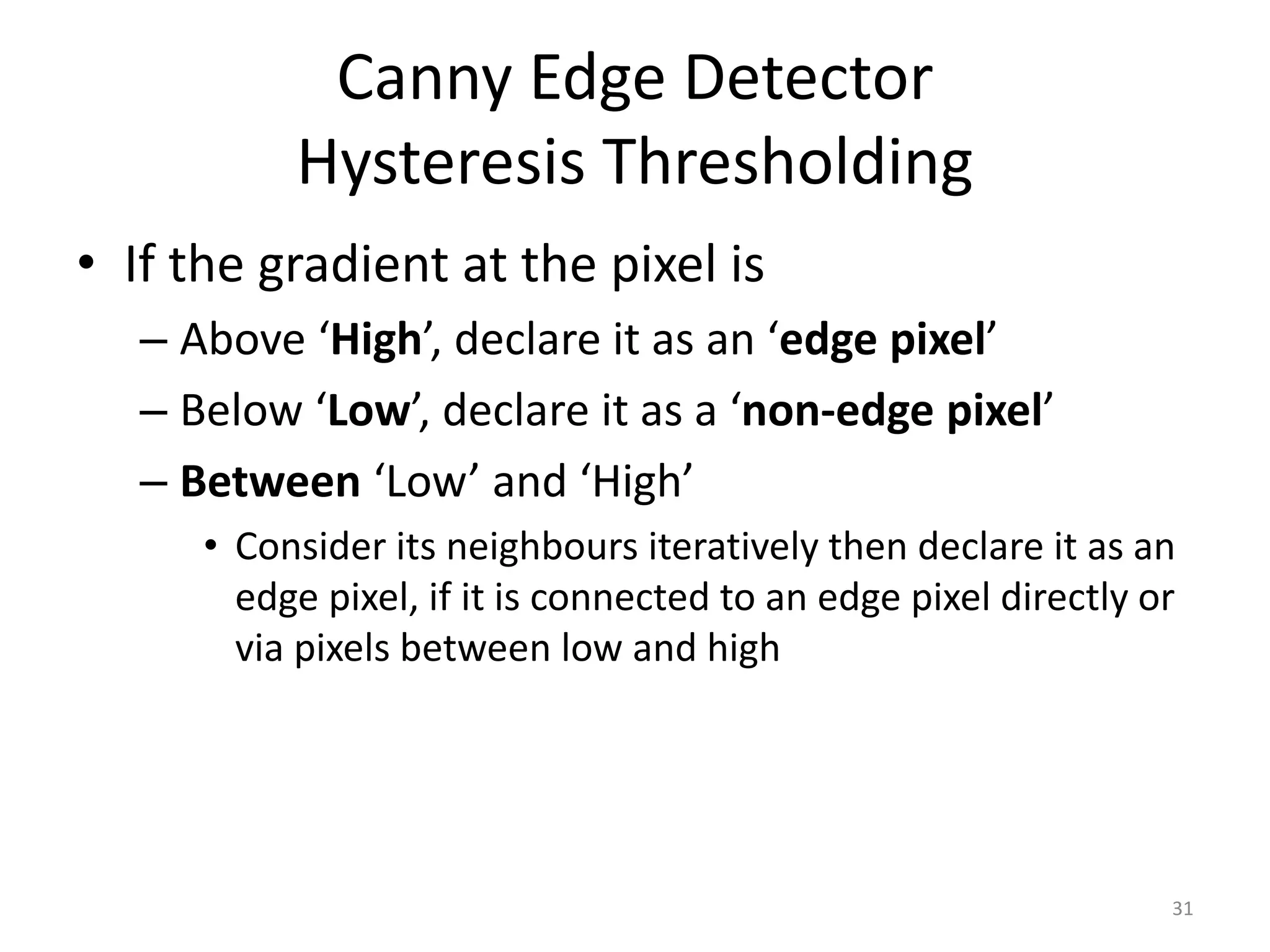
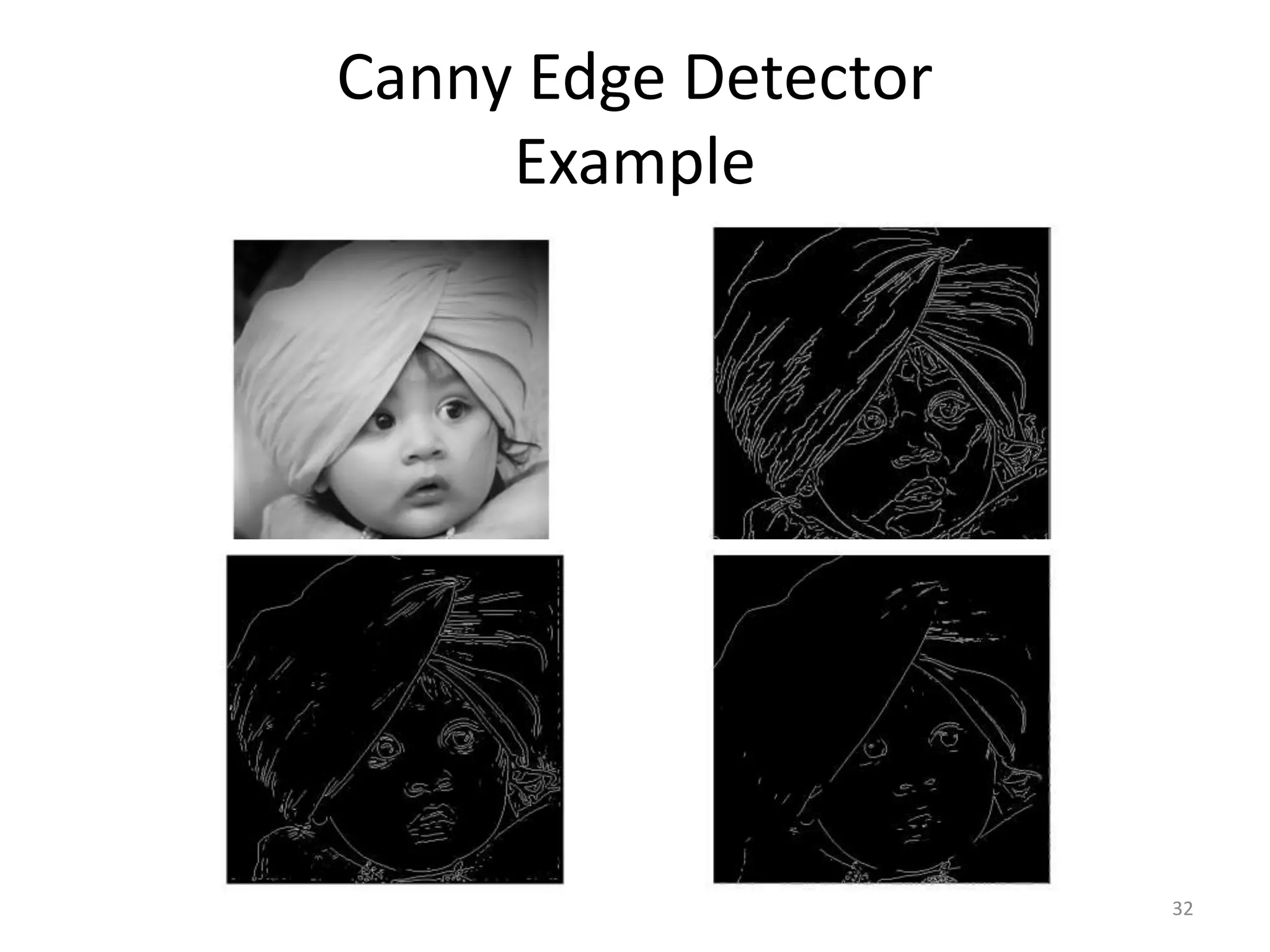

Edge detection algorithms identify points in a digital image where the image brightness changes sharply or has discontinuities. Common edge detection methods include gradient operators like Prewitt and Sobel, the Laplacian of Gaussian (LoG) used in Marr-Hildreth edge detection, and the Canny edge detector. The Canny edge detector applies smoothing, finds the image gradient, performs non-maximum suppression and double thresholding to detect edges with good localization and a single response to each edge.

















































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)
