Download to read offline
![• How can we differentiate a digital image F[x,y]?
– Option 1: reconstruct a continuous image, f, then
compute the derivative
– Option 2: take discrete derivative (finite difference)
1 -1
How would you implement this as a linear filter?
Image derivatives
-1
1
: :
Source: S. Seitz](https://image.slidesharecdn.com/lec02edge-200719134756/85/Computer-vision-edge-detection-8-320.jpg)
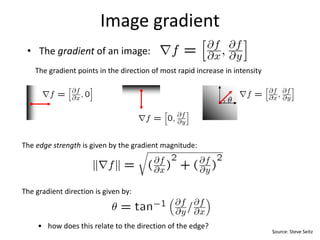
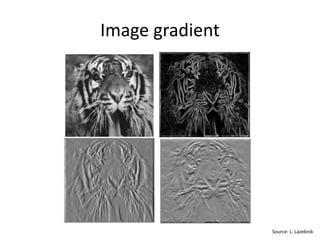
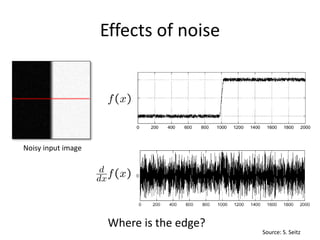
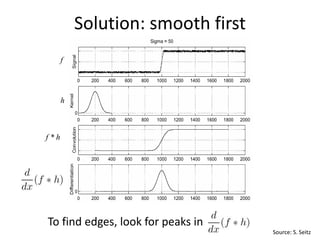
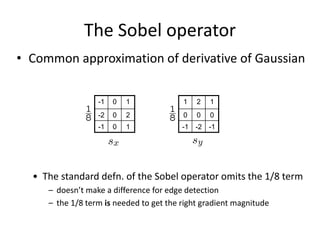
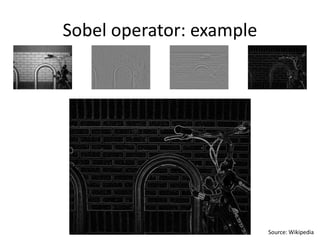
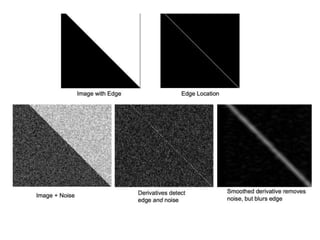
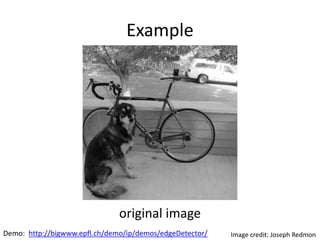
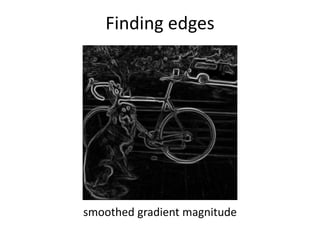
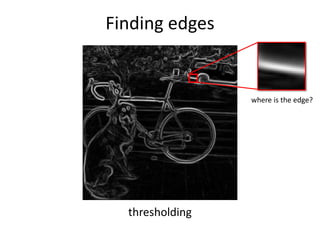
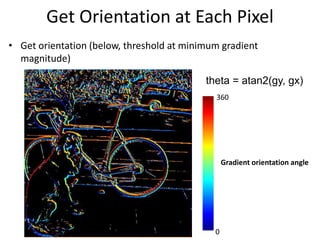
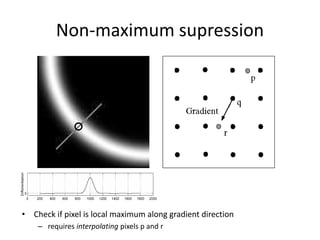
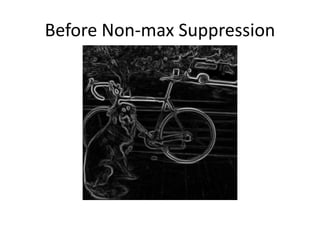
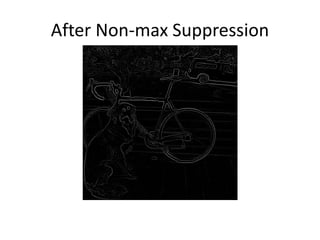
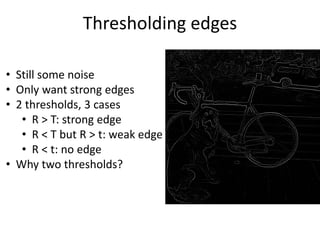
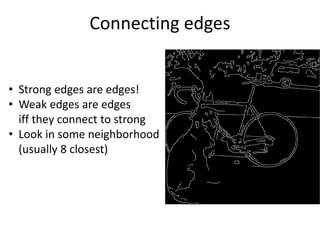
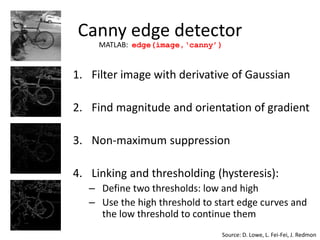
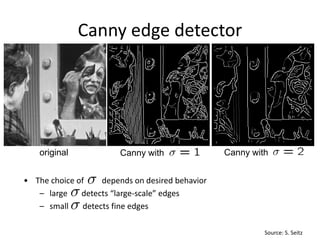
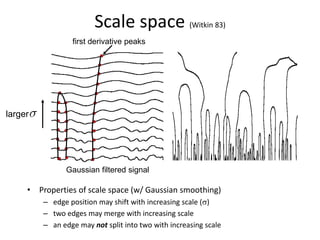

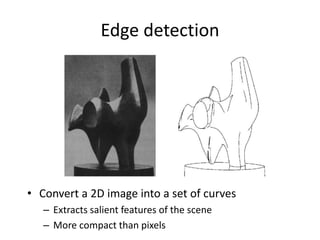
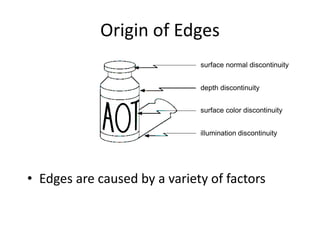
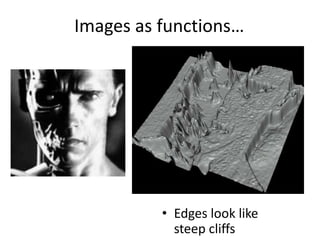
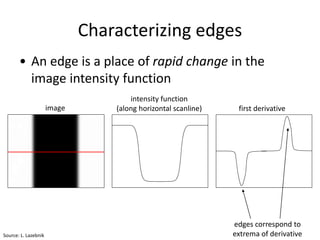
This document summarizes a lecture on edge detection in computer vision. It discusses how edges can be detected by finding places of rapid change in image intensity using derivatives and gradient filters like the Sobel operator. It also covers non-maximum suppression to thin edges and Canny edge detection, which uses two thresholds to link edges after filtering the image with derivatives of Gaussians. The Canny edge detector is presented as the standard computer vision pipeline for edge detection.