Downloaded 33 times

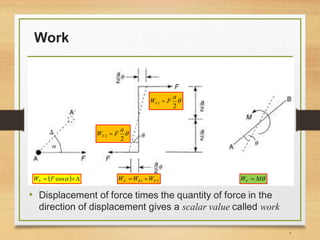
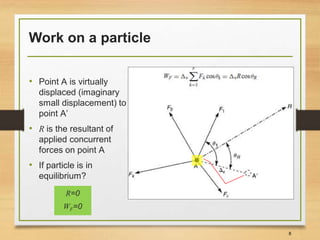
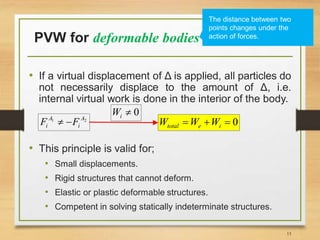
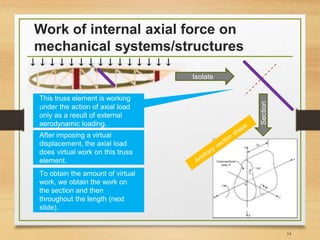
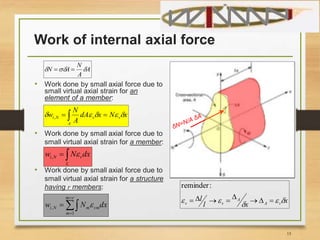
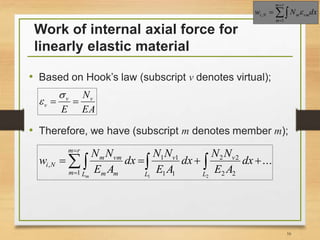


The document summarizes the principle of virtual work (PVW) used in structural analysis. It defines work done by forces and virtual work done by internal forces in structures during small imaginary displacements. It provides examples of using PVW to determine bending moment, axial force, and slope of indeterminate structures by equating virtual work done by internal and external forces. The key concepts are defined in less than 3 sentences.






































](https://cdn.slidesharecdn.com/ss_thumbnails/virtualworkmodifiedcompatibilitymode1-160126134241-thumbnail.jpg?width=640&height=640&fit=bounds)














































