Downloaded 39 times
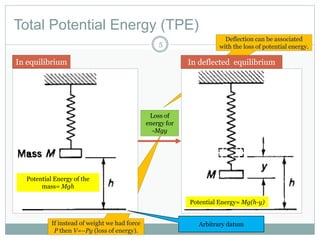
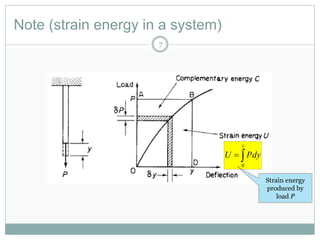
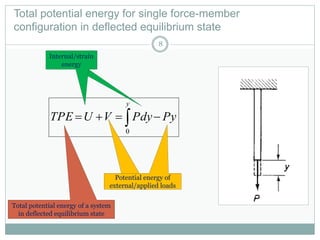
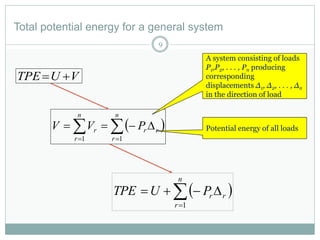
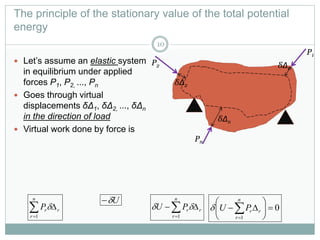
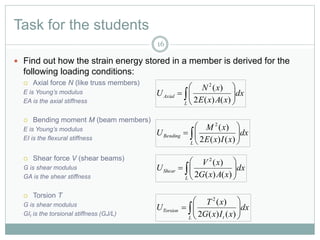
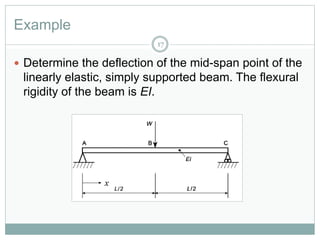
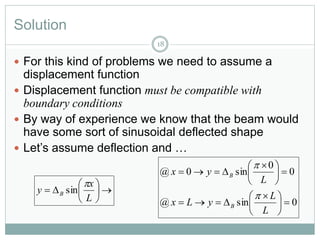
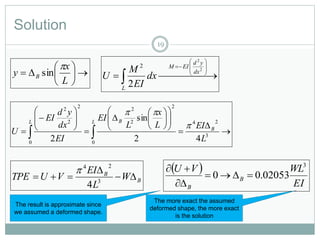
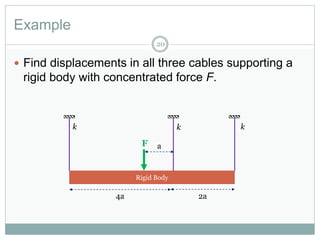
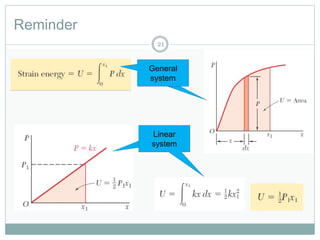
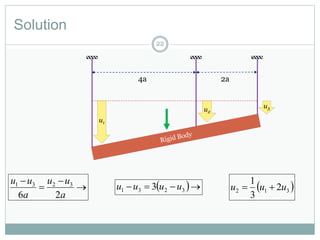
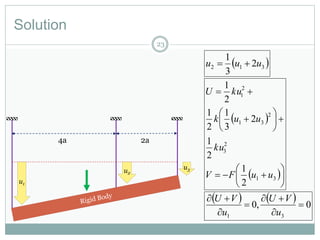
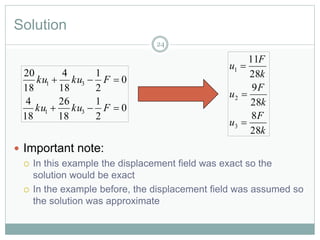
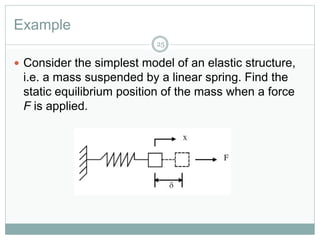
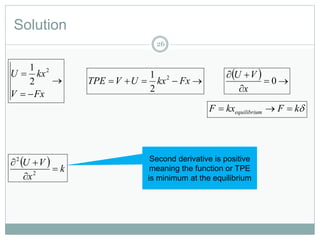
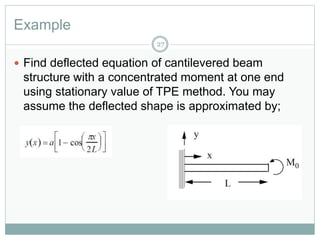
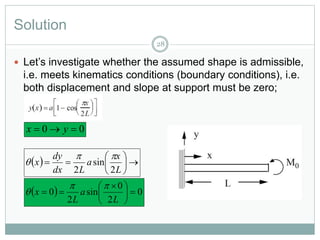
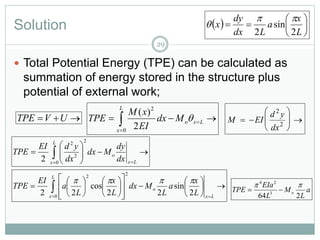
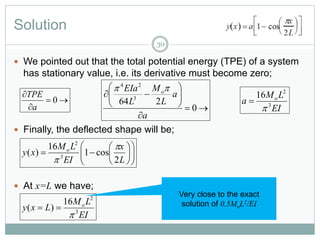

The document discusses energy methods for structural analysis, including the total potential energy method. It provides examples of deriving the strain energy stored in different structural members under different loading conditions such as axial force, bending moment, shear force, and torsion. It also provides examples of using the principle of stationary total potential energy to solve for displacements in determinate structures by assuming a displacement function and minimizing the total potential energy.