Downloaded 116 times
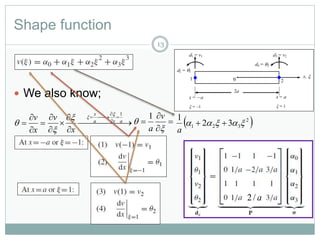
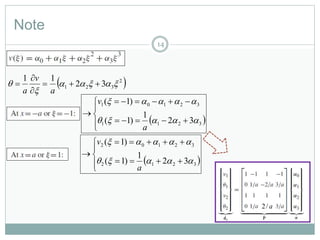
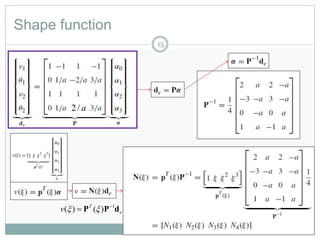
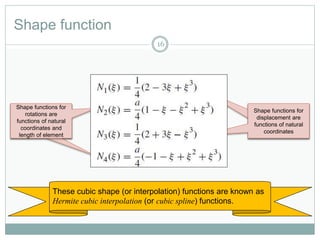
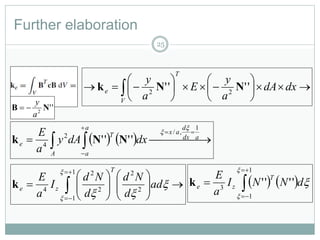
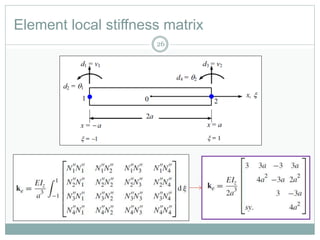
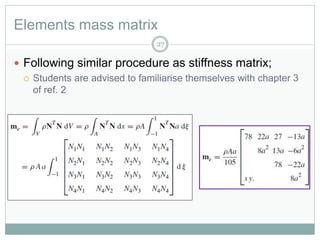
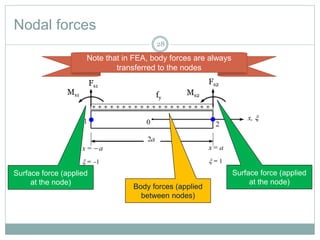
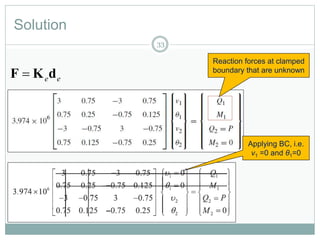
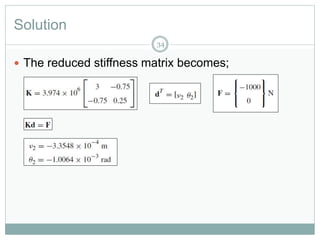
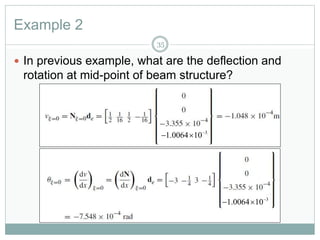

This document provides an introduction to using the finite element method to analyze beam structures. It discusses the basic theory behind discretizing beams into finite elements, including defining the element geometry, determining the shape functions, and assembling the element stiffness matrix. It then provides examples of using the method to calculate deflections and rotations of beams under different loading conditions. Tutorial problems are included to have students apply the concepts by modeling beam problems in Abaqus finite element software.





















































































