Download as PDF, PPTX














![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-28-320.jpg)
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-29-320.jpg)
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-30-320.jpg)
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-31-320.jpg)
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-32-320.jpg)
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://image.slidesharecdn.com/ch7kalmanfiltergeneralizations-200715034919/85/Sensor-Fusion-Study-Ch7-Kalman-Filter-Generalizations-33-320.jpg)

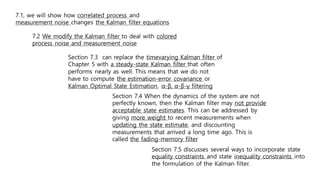
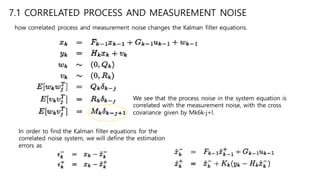
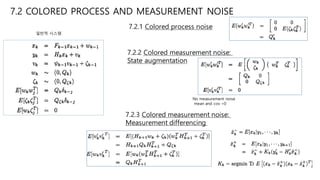
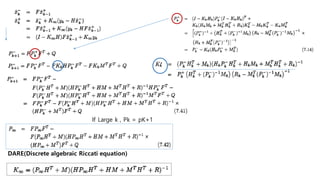
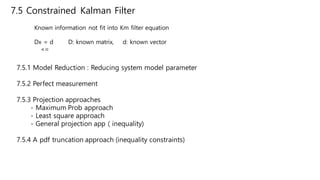
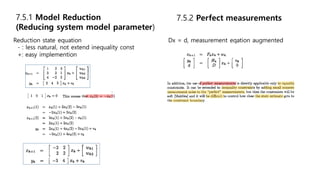
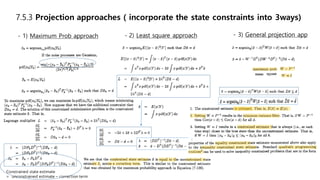
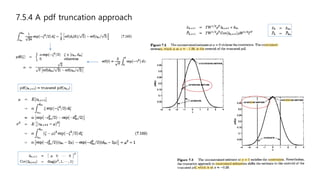
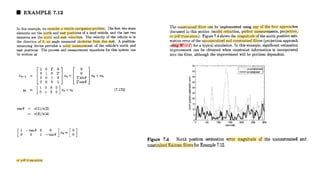
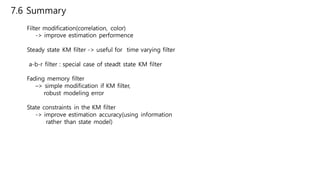
This document discusses several generalizations and modifications that can be made to the standard Kalman filter. Section 7.3 describes how a steady-state Kalman filter can be used instead of a time-varying filter when system dynamics are time-invariant. Section 7.4 discusses a fading memory filter that discounts older measurements to address cases when system dynamics are imperfectly known. Section 7.5 presents several approaches to incorporate state equality and inequality constraints into the Kalman filter formulation, including model reduction, projection approaches, and probability density function truncation.
![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch5. The discrete-time Kalman filter [박정은]](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-200712161939-thumbnail.jpg?width=640&height=640&fit=bounds)

![Sensor Fusion Study - Ch8. The Continuous-Time Kalman Filter [이해구]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter8-thecontinuoustimekalmanfilter-200715035017-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch15. The Particle Filter [Seoyeon Stella Yang]](https://cdn.slidesharecdn.com/ss_thumbnails/particlefilter-200815094542-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch3. Least Square Estimation [강소라, Stella, Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter3-200521130800-thumbnail.jpg?width=640&height=640&fit=bounds)







































![Sensor Fusion Study - Real World 2: GPS & INS Fusion [Stella Seoyeon Yang]](https://cdn.slidesharecdn.com/ss_thumbnails/gpsins-200817095309-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch14. The Unscented Kalman Filter [Sooyoung Kim]](https://cdn.slidesharecdn.com/ss_thumbnails/ukf-200817092334-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Real World 1: Lidar radar fusion [Kim Soo Young]](https://cdn.slidesharecdn.com/ss_thumbnails/lidarradarfusion-200815095222-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch12. Additional Topics in H-Infinity Filtering [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/ch12-200815075328-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch11. The H-Infinity Filter [김영범]](https://cdn.slidesharecdn.com/ss_thumbnails/11h-inf-200815075146-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch9. Optimal Smoothing [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/optimalsmoothing-200815074615-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch6. Alternate Kalman filter formulations [Jinhyuk Song]](https://cdn.slidesharecdn.com/ss_thumbnails/ch6alternative-200712162741-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch4. Propagation of states and covariance [김동현]](https://cdn.slidesharecdn.com/ss_thumbnails/optimisticstudychapter4-200520224531-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch2. Probability Theory [Stella]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter2-200424170905-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch1. Linear System [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/osech1slide-200424170544-thumbnail.jpg?width=640&height=640&fit=bounds)





















