
Download as PDF, PPTX







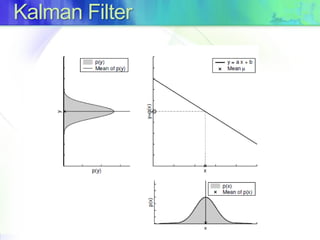
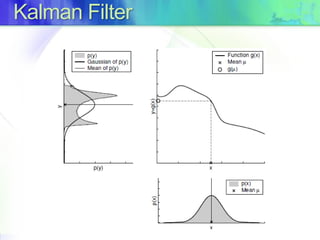

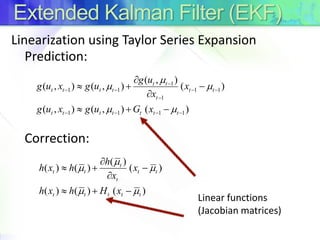
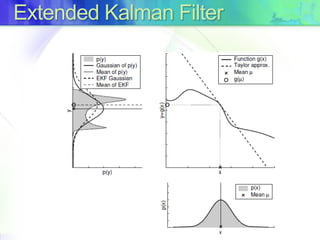



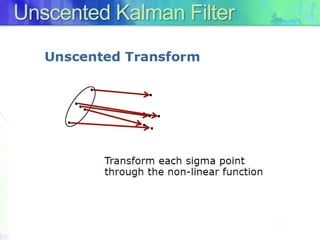
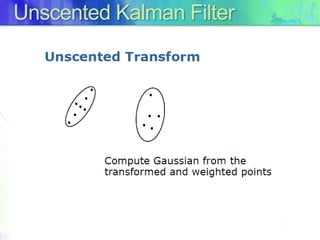
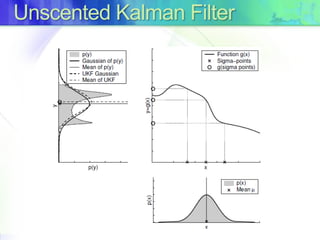

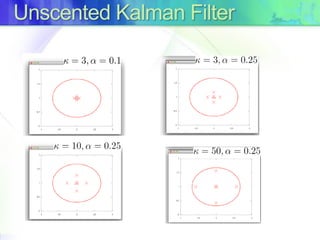

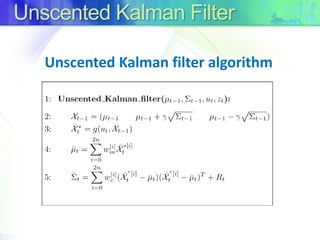
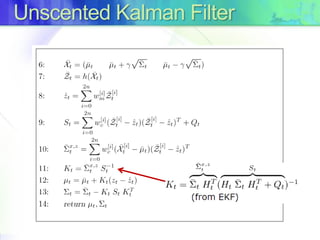

The document discusses Kalman filters and their applications in tracking and data prediction. It provides an overview of the basic Kalman filter, which works optimally for linear models. It then describes the extended Kalman filter (EKF) which uses Taylor series linearization to apply the Kalman filter to nonlinear systems. Finally, it introduces the unscented Kalman filter (UKF) which uses the unscented transform for better linearization compared to the EKF when nonlinearities are large.





























![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)






































