Downloaded 73 times





![Adaptive Signal Processing
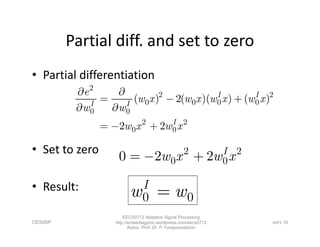
• Definition: Adaptive signal processing is the
design of adaptive systems for signal-
processing applications.
[http://encyclopedia2.thefreedictionary.com/adaptive+signal+pr
ocessing]
• Definition: Adaptive signal processing is the
design of adaptive systems for signal-
processing applications.
[http://encyclopedia2.thefreedictionary.com/adaptive+signal+pr
ocessing]
CESdSP
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon
ASP1-7](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-7-320.jpg)










![Input
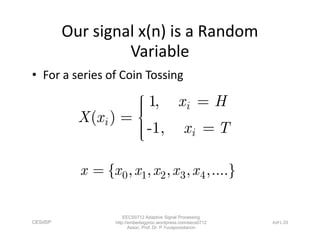
• From
• We construct the x as vector with first
element is the most recent
(3), (2), (1), (0), ( 1), ( 2),...x x x x x x
• From
• We construct the x as vector with first
element is the most recent
CESdSP
[ (3) (2) (1) (0)...]T
x x x xx
ASP1-20
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-20-320.jpg)

![Regression input signal vector
• If the current time is n, we have “Regression
input signal vector”
[ ( ) ( 1) ( 2) ( 3)...]T
x n x n x n x n x
CESdSP
[ ( ) ( 1) ( 2) ( 3)...]T
x n x n x n x n x
ASP1-22
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-22-320.jpg)
![0
0 1
1
[ ]T
w
w ww
w
CESdSP
0
0 1
1
[ ]T
w
w ww
w
0
0 1
1
ˆ [ ]
I
I I T
I
w
w w
w
w
ASP1-23
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-23-320.jpg)


![• We can use a vector-matrix multiplication
• For example, for n=3 we construct y(3) as
• For example, for n=1 we construct y(1) as
0 1 0 1
(3)
(3) (3) (2) [ ] (3)
(2)
T
x
y w x w x w w
x
w x
• We can use a vector-matrix multiplication
• For example, for n=3 we construct y(3) as
• For example, for n=1 we construct y(1) as
CESdSP
0 1 0 1
(3)
(3) (3) (2) [ ] (3)
(2)
T
x
y w x w x w w
x
w x
0 1 0 1
(1)
(1) (1) (0) [ ] (1)
(0)
T
x
y w x w x w w
x
w x
ASP1-26
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-26-320.jpg)
![0 1 0 1
0 1 0 1
0 1 0 1
0 1 0 1
(3)
(3) (3) (2) [ ] (3)
(2)
(2)
(2) (2) (1) [ ] (2)
(1)
(1)
(1) (1) (0) [ ] (1)
(0)
(2)
(0) (0) ( 1) [ ] (0
(1)
T
T
T
T
x
y w x w x w w
x
x
y w x w x w w
x
x
y w x w x w w
x
x
y w x w x w w
x
w x
w x
w x
w x )
CESdSP
0 1 0 1
0 1 0 1
0 1 0 1
0 1 0 1
(3)
(3) (3) (2) [ ] (3)
(2)
(2)
(2) (2) (1) [ ] (2)
(1)
(1)
(1) (1) (0) [ ] (1)
(0)
(2)
(0) (0) ( 1) [ ] (0
(1)
T
T
T
T
x
y w x w x w w
x
x
y w x w x w w
x
x
y w x w x w w
x
x
y w x w x w w
x
w x
w x
w x
w x )
ASP1-27
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-27-320.jpg)













![Cumulative Distribution Function
CESdSP
( ( )) Pr[ ( )]P x n X x n x
ASP1-43
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-43-320.jpg)






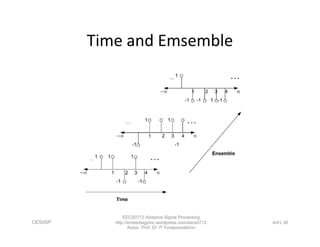
![Ensemble Average
i ensembles
1 1 2 2Ensemble Average of (1) (1)Pr[ (1)] (1)Pr[ (1)]
(1)Pr[ (1)]N N
x x x x x
x x
1 ensemble
CESdSP
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon
ASP1-50
i ensembles](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-50-320.jpg)








![Covariance
( , ) {[ ( ) ( )][ ( ) ( )]}c n m E x n n x m m xx
CESdSP
EECS0712 Adaptive Signal Processing
http://embedsigproc.wordpress.com/eecs0712
Assoc. Prof. Dr. P.Yuvapoositanon
ASP1-59
( , ) {[ ( ) ( )][ ( ) ( )]}c n m E x n n x m m xx](https://image.slidesharecdn.com/eecs07122of25581-160510025725/85/Introduction-to-adaptive-signal-processing-59-320.jpg)














This document outlines an introduction to adaptive signal processing. It discusses how adaptive signal processing designs adaptive systems for signal processing applications. The course covers adaptive algorithm families including Newton's method, steepest descent, LMS, RLS, and Kalman filtering. It also covers applications in communications and blind equalization. The evaluation is based on assignments, a midterm, and a final exam.