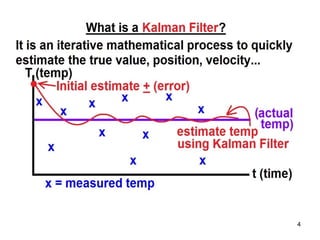
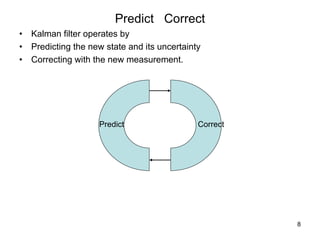
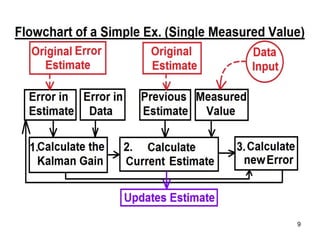
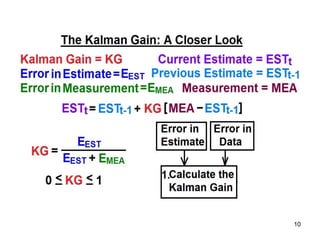
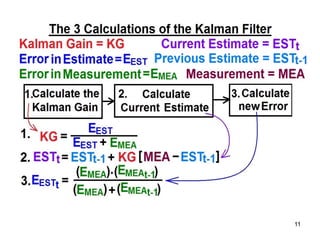
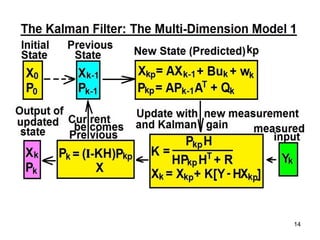
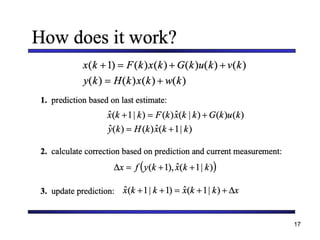
The Kalman filter is a mathematical algorithm that uses a series of measurements observed over time, containing statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more precise than those based on a single measurement alone. It is effective at combining noisy sensor outputs to estimate the state of a dynamic system. Since its introduction in 1960, the Kalman filter has become widely used in applications like navigation systems, tracking objects, and computer vision. It works by predicting the new state and uncertainty, then correcting with a new measurement in a recursive manner.
![27
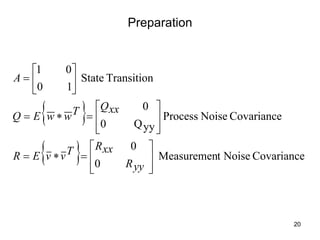
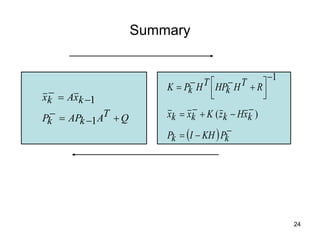
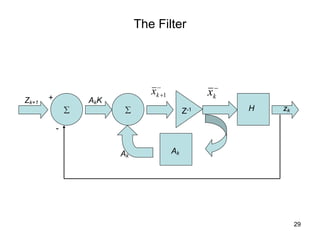
Kalman Predictor Update Equation
( )
[ ]
-
-
-
+ -
+
=
= k
k
k
k
k x
H
z
K
x
A
x
A
x 1
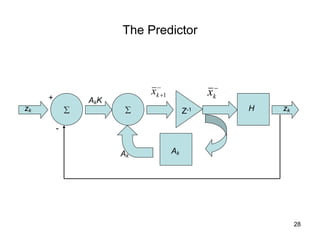
Prior estimate of xk
system.
actual
the
like
much
looks
that
system
a
be
out to
turn
will
predictor
The](https://image.slidesharecdn.com/kf-220809135241-5b1bae6e/85/Kalman-filter-pdf-27-320.jpg)







































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)






