Downloaded 196 times
![Introduction to Adaptive Filter [Efea 541]
• An adaptive filter is a digital filter with self-
adjusting characteristics.
• It adapts, automatically, to changes in its
input signals.
• A variety of recursive algorithms have been
developed for the operation of adaptive
filters, e.g., LMS, RLS, etc.
02/03/13 15:14 A.H. 4](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-4-320.jpg)
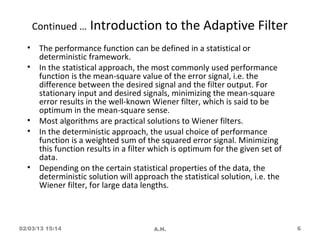
![Continued … Introduction to the Adaptive Filter
[Far 2]
• The figure shows a filter emphasizing the way it is used in
typical problems.
• The filter is used to reshape certain input signals in such a
way that its output is a good estimate of the given desired
signal.
• The process of selecting or adapting in this case the filter
parameters (coefficients) so as to achieve the best match
between the desired signal and the filter output is often
done by optimizing an appropriately defined performance
function.
02/03/13 15:14 A.H. 5](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-5-320.jpg)

![Adaptive Filter Structure [Far 3]
M −1
y (n) = ∑ wi (n) x(n − i )
i =0
02/03/13 15:14 A.H. 9](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-9-320.jpg)

![Adaptive Filter Algorithms [Ifea 648]
• LMS – Least Mean Square
• RLS – Recursive Least Squares
• Kalman Filter Algorithms
LMS
• The most efficient in terms of computation and storage
requirements
• Does not suffer from the numerical instability problem.
• Popular
02/03/13 15:14 A.H. 11](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-11-320.jpg)
![The LMS Algorithm
[Far 138, Ifea 654, Hay 299, Proa 902-905]
02/03/13 15:14 A.H. 12](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-12-320.jpg)
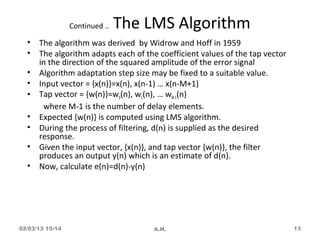
![Continued .. The LMS Algorithm
We write here 3 basic relations of the LMS
algorithm [Hay 303, Far 141]
1. Filter output y ( n) = w T ( n) x ( n)
2. Estimation error e( n ) = d ( n ) − y ( n )
3. Tap-weight update w (n + 1) = w (n) + µx (n)e(n)
02/03/13 15:14 A.H. 14](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-14-320.jpg)
![Summary of the LMS Algorithm [Far 141]
02/03/13 15:14 A.H. 15](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-15-320.jpg)
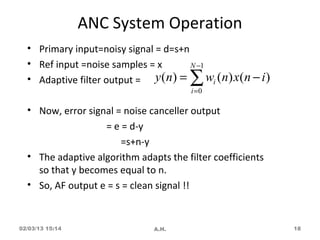
![AF Application: Noise Cancellation
[Hay 48, Far 21, Proa 896]
• Adaptive Noise Cancelling (ANC) is performed by
subtracting noise from a signal (where noise has
been mixed) for the purpose of improved signal-
to-noise ratio.
• The filtering and subtraction are controlled by the
adaptive process.
• Basically an adaptive noise canceller is a dual
input, closed adaptive control system.
02/03/13 15:14 A.H. 16](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-16-320.jpg)

![HOME WORKS
• Application of Adaptive filtering to system
identification(System Modeling) problem [Proa
P882].
• Adaptive Channel Equalization [Proa 883].
• Adaptive Echo Canellation [Proa 887].
02/03/13 15:14 A.H. 19](https://image.slidesharecdn.com/dsplecturevol-7adaptivefilter-130203091414-phpapp02/85/Dsp-lecture-vol-7-adaptive-filter-19-320.jpg)

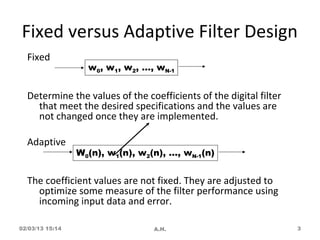
This document provides an overview of adaptive filters, including: - Adaptive filters have coefficients that are adjusted based on input data to optimize performance, unlike fixed filters. - The LMS algorithm is commonly used to adjust coefficients to minimize the mean square error between the filter output and a desired signal. - Key applications of adaptive filters include noise cancellation, system identification, channel equalization, and echo cancellation.