Downloaded 167 times

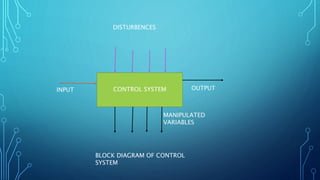
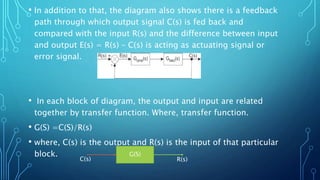

This document provides an introduction to control engineering. It discusses several key points: 1) Control engineering deals with designing systems to control dynamic processes and improve response speed, accuracy, and stability. This includes analyzing both classical and modern control methods. 2) Modern control engineering uses state-space and eigenvector approaches to model multi-input multi-output systems as sets of first-order differential equations. 3) Automatic control systems are commonly used, where a controlled variable is measured and compared to a setpoint to generate an output that achieves the desired result. This reduces costs and improves quality and productivity over manual control.




















































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)


















