Downloaded 322 times







![ISOCHRONOUS FREQ CONTROL
CONSIDER FOLL SEQUENCE OF EVENTS:
THREE TG SETS LOADED AT 27MW EACH, GRID AT 15MW I.E. TOTAL LOAD 96MW
CHEMICAL DIV. TRIPS (70MW LOAD THROW), BALANCE LOAD IS 96MW-70MW=26MW
GRID TRIPS (15MW) ON REV POWER
THE 3 TG SETS ARE ISLANDED IN DROOP MODE (DROOP=6%), CONNECTED LOAD = 26MW, I.E. 8.67MW PER TG
SO, FOR EACH TG SET % LOAD REDUCTION = [(27 - 8.67)/32]*100 = 57.28%
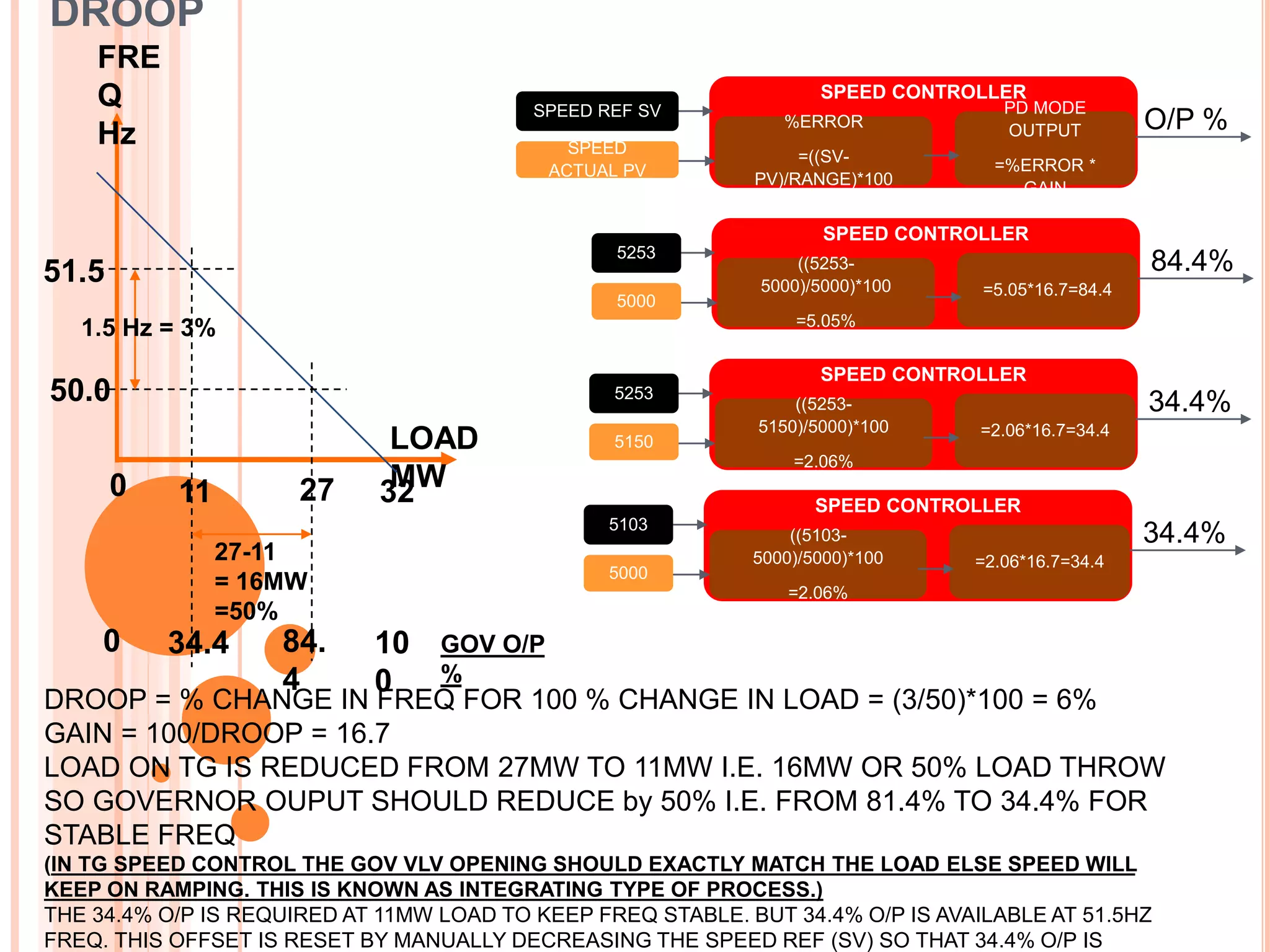
THE GOV O/P CHANGE = (%FREQ ERROR)*(GAIN)
So, % FREQ ERROR = 57.28/16.7 = 3.43% I.E. 3.43/2 = 1.7HZ
SO FINAL FREQ WILL STABILIZE AT 51.7HZ, WHICH WILL TRIP ALL TG SETS ON OVERFREQ
IF ONE TG IS IN ISOCHRONOUS FREQ CONTROL IN ISLAND MODE, THEN THIS TG SET WILL TRIP AFTER FULLY
UNLOADING & ONLY 2 TG SETS WITH DROOP WILL RUN I.E. 13MW PER TG SET
SO, FOR EACH TG SET % LOAD REDUCTION = [(27 - 13)/32]*100 = 57.28%
THE GOV O/P CHANGE = (%FREQ ERROR)*(GAIN)
So, % FREQ ERROR = 57.28/16.7 = 3.43% I.E. 3.43/2 = 1.7HZ](https://image.slidesharecdn.com/electrohydraulicgoverningsystem-160809195739/75/Electrohydraulic-governing-system-15-2048.jpg)

















The document presents a detailed overview of the Electro-Hydraulic Turbine Controller (EHTC) used for turbine operations, including various control functionalities and modes such as speed and load control. It discusses the operational sequences during startup, synchronization with the grid, islanding conditions, and the importance of droop control for frequency stabilization among turbine generators. Furthermore, it addresses issues encountered with the ratio setter and control system adjustments made to enhance performance and stability during island conditions.
Presentation introduction on Electro-Hydraulic Control System by Ashvani Shukla from Reliance.
Introduction of EHTC as the governor for turbine and its various controllers like speed, isochronous frequency, and load controllers.
Detailed EHTC block diagram showcasing components like speed controllers and pressure controllers.
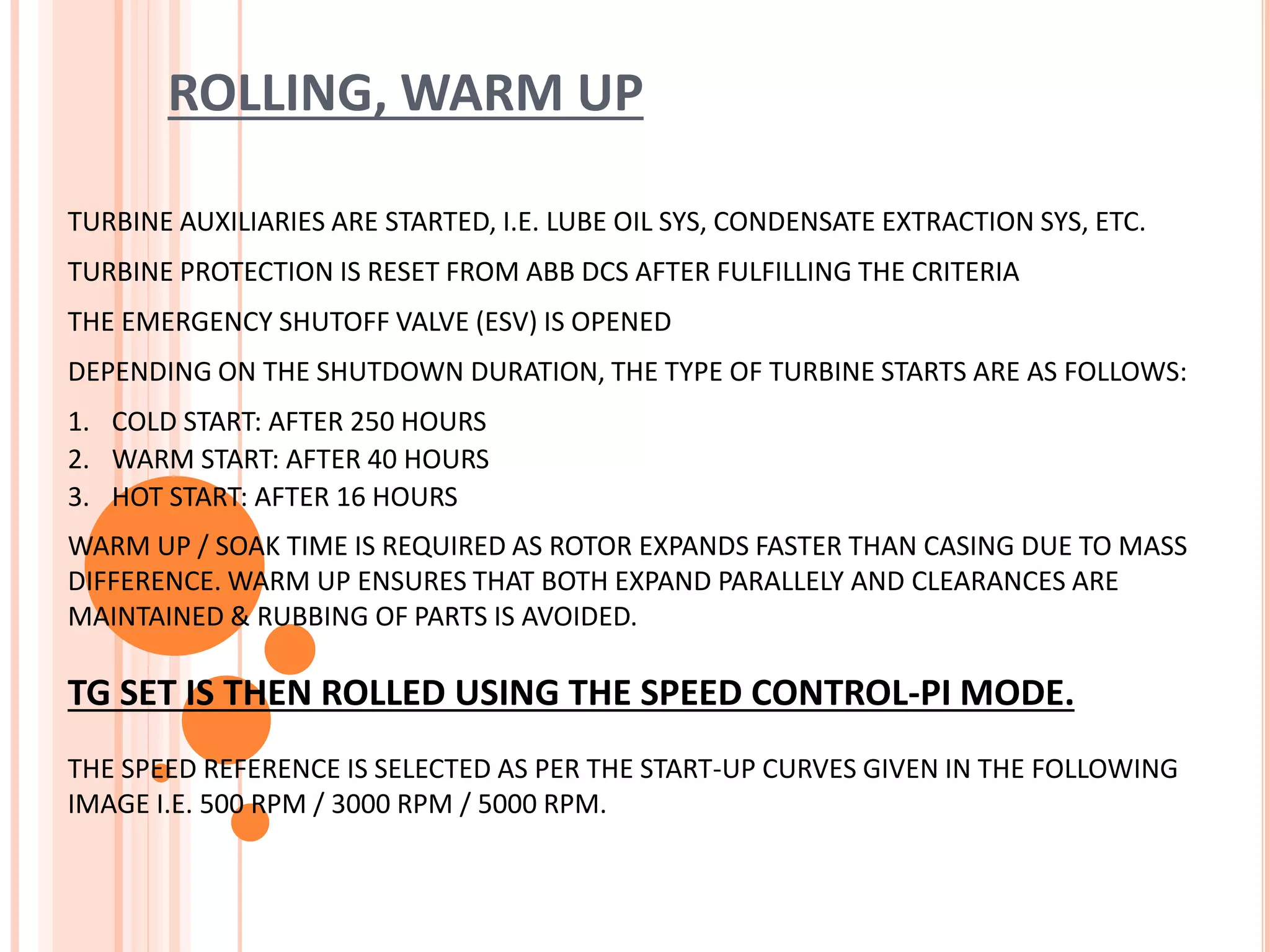
Outline of EHTC functions including rolling, warm up, critical speed avoidance, and load/speed control.
Process of starting turbine auxiliaries and different types of turbine starts based on duration.
Methodologies for avoiding critical speed bands during turbine operations to ensure safety.
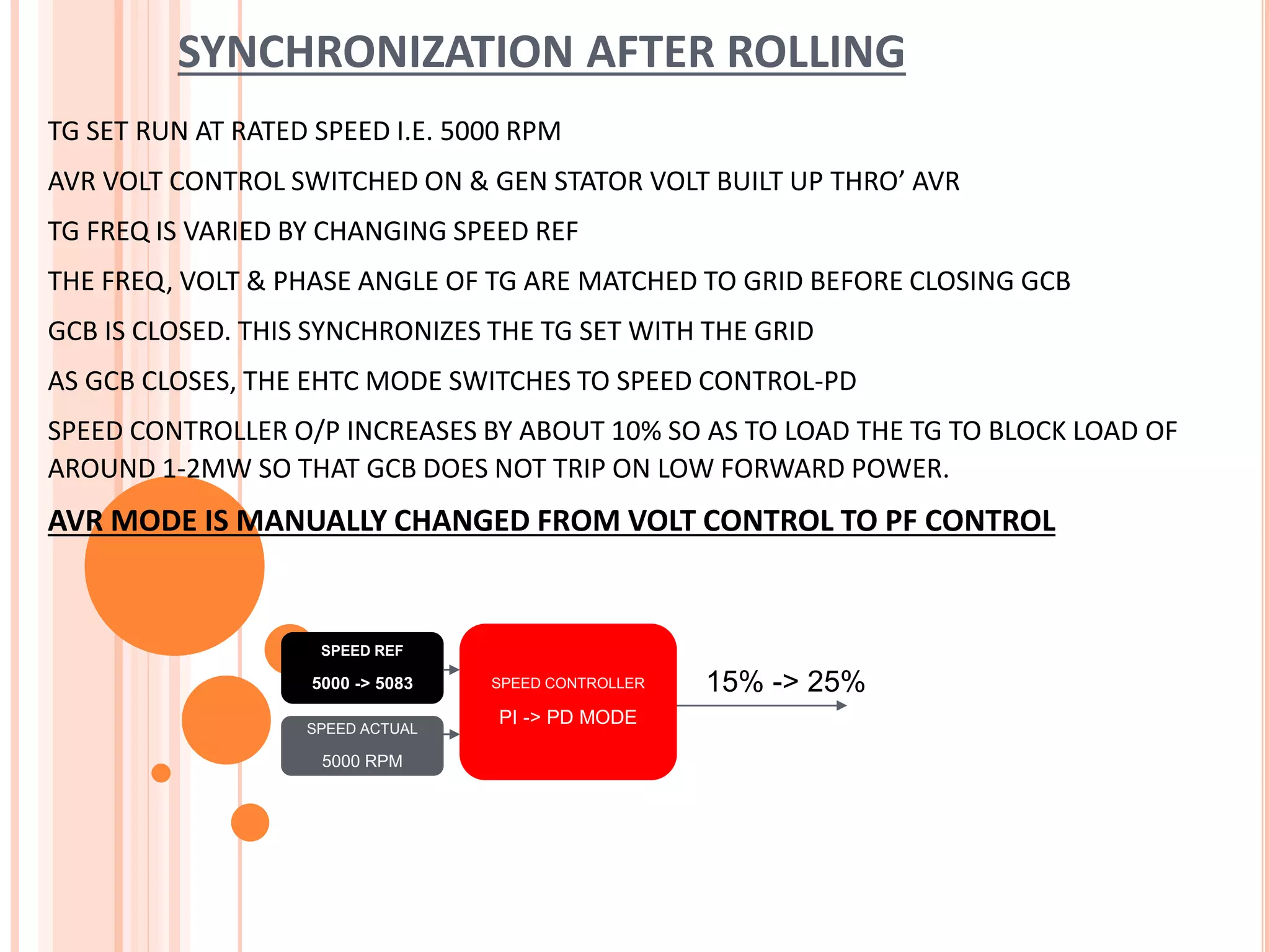
Steps to synchronize the turbine generator with the grid, detailing frequency and load adjustments.
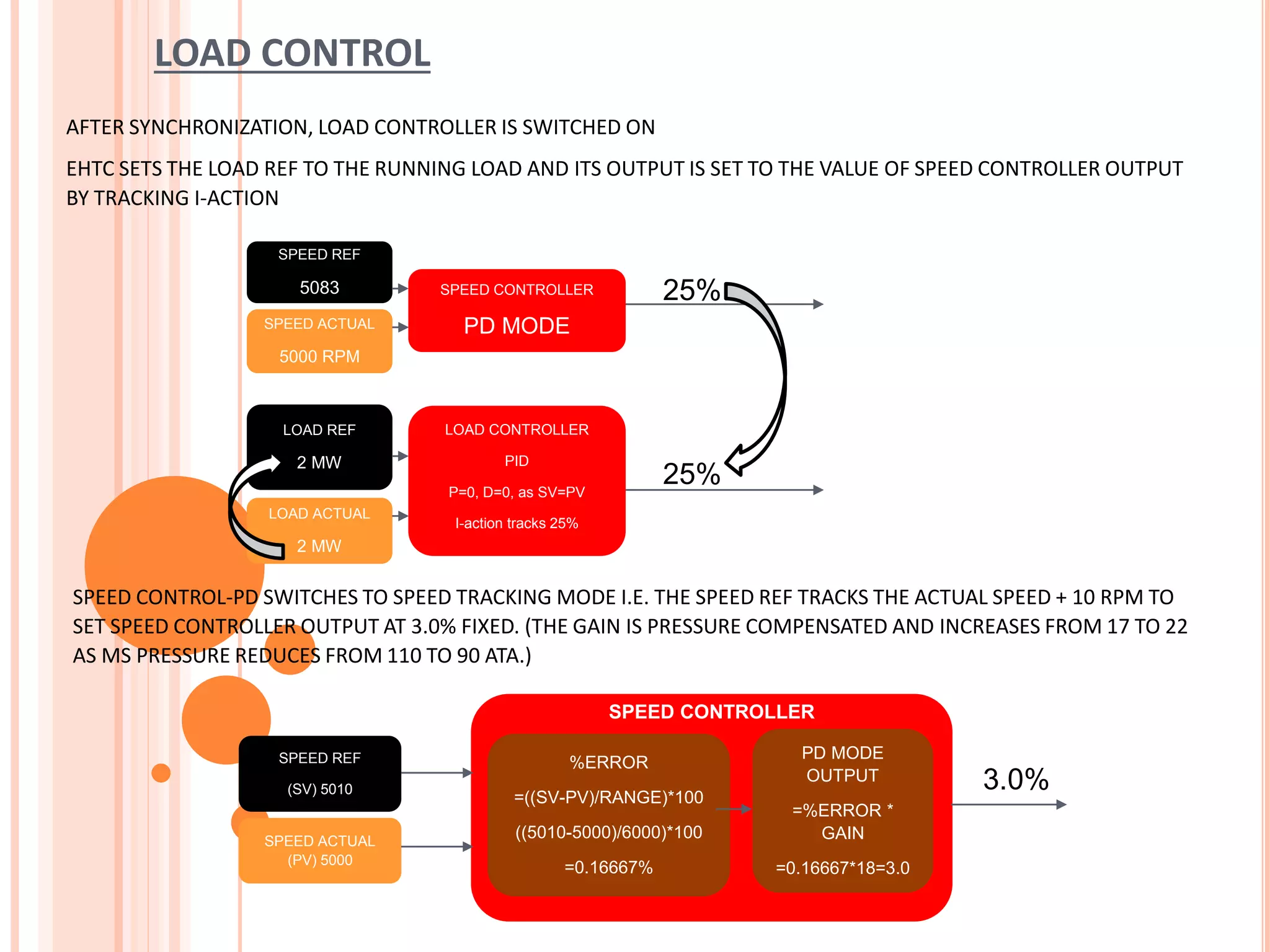
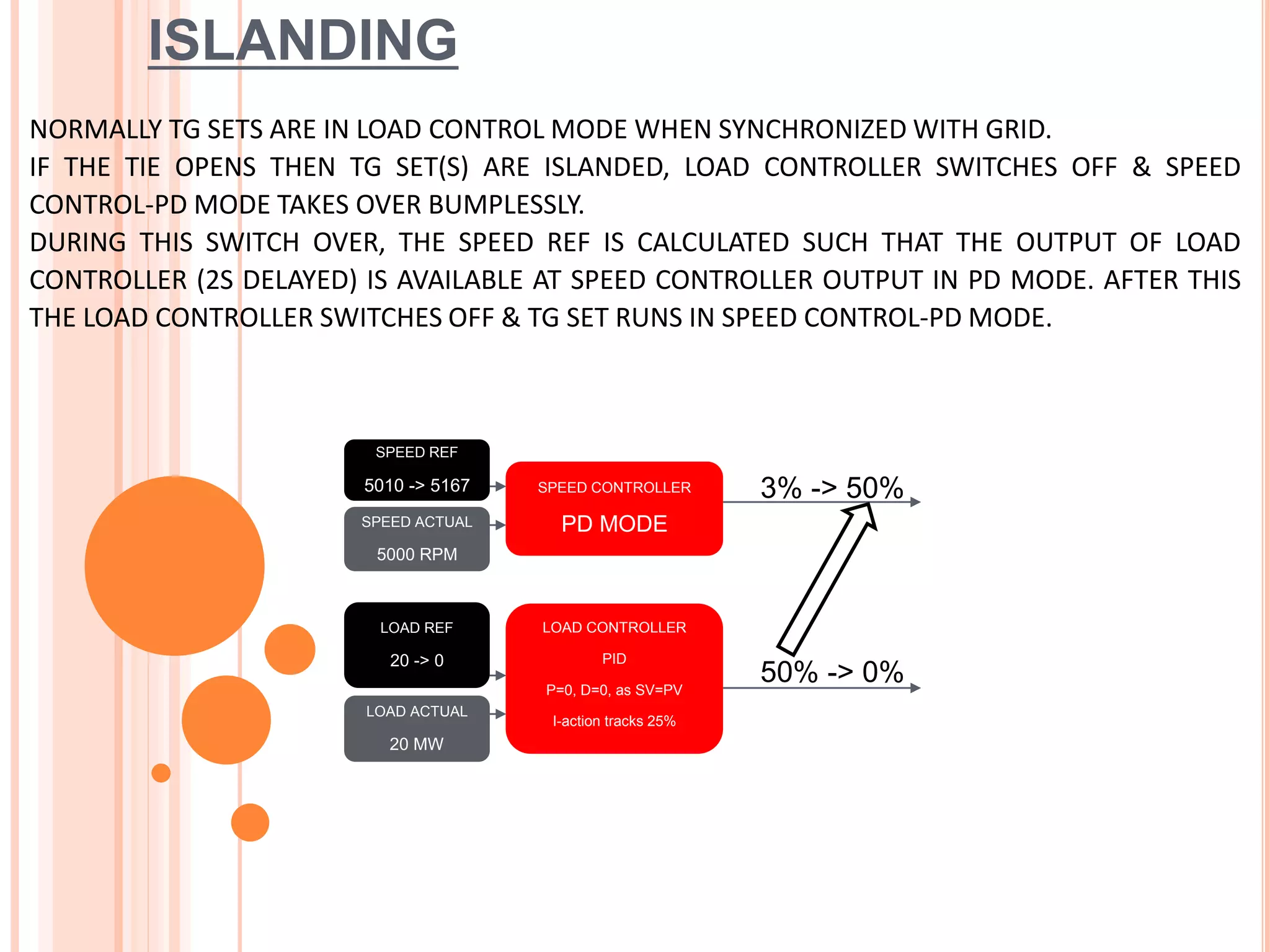
Overview of load controller functioning post-synchronization and maintaining output based on speed controller.
Process and implications of islanding during grid disconnection and the transition of control modes.
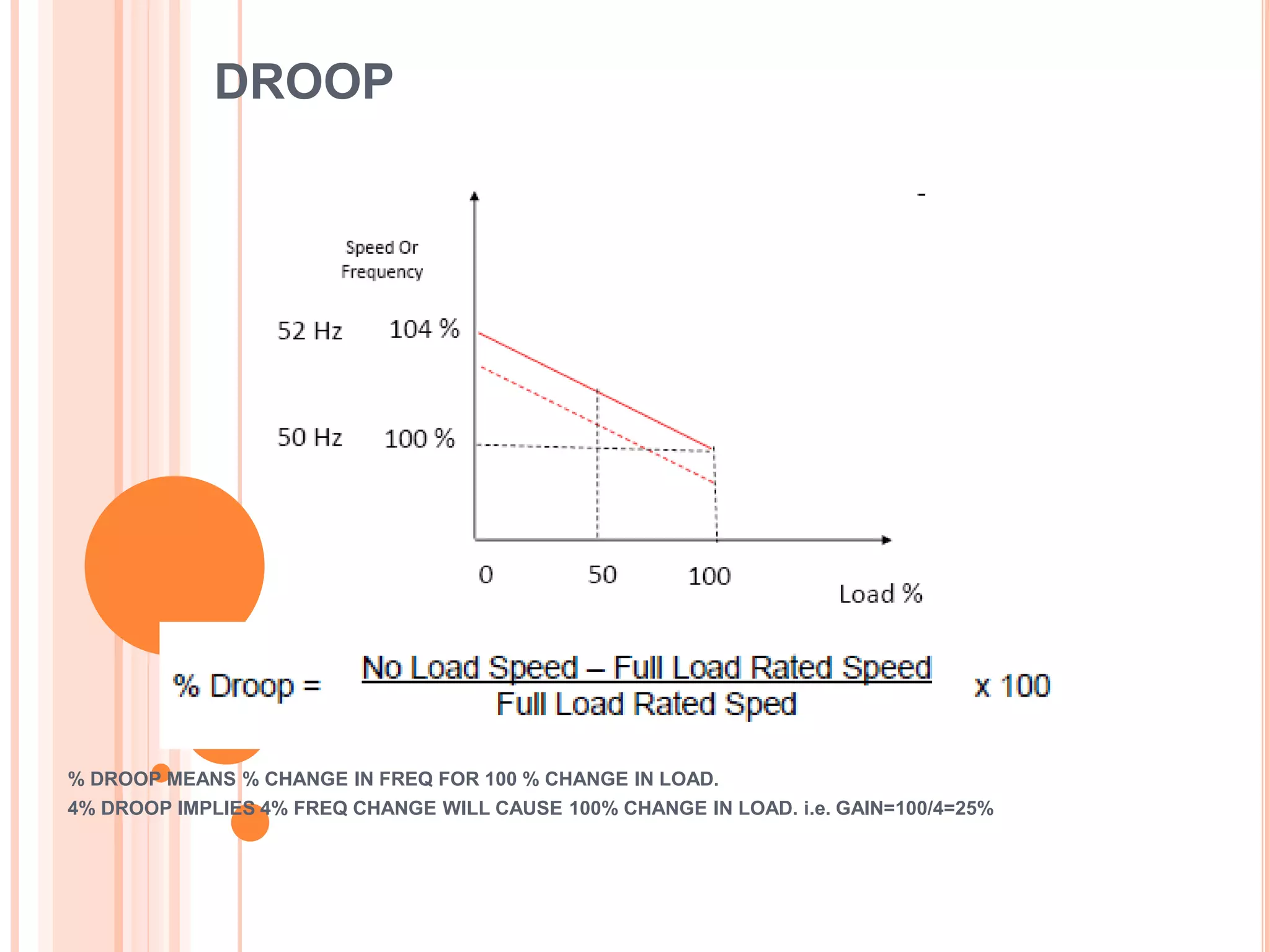
Explanation of droop control in systems with multiple turbines, emphasizing its necessity for frequency stability.
Initiation and implications of isochronous frequency control within islanded turbine systems.
Mechanics of load shedding to prevent turbine tripping during abrupt grid changes and overloading.
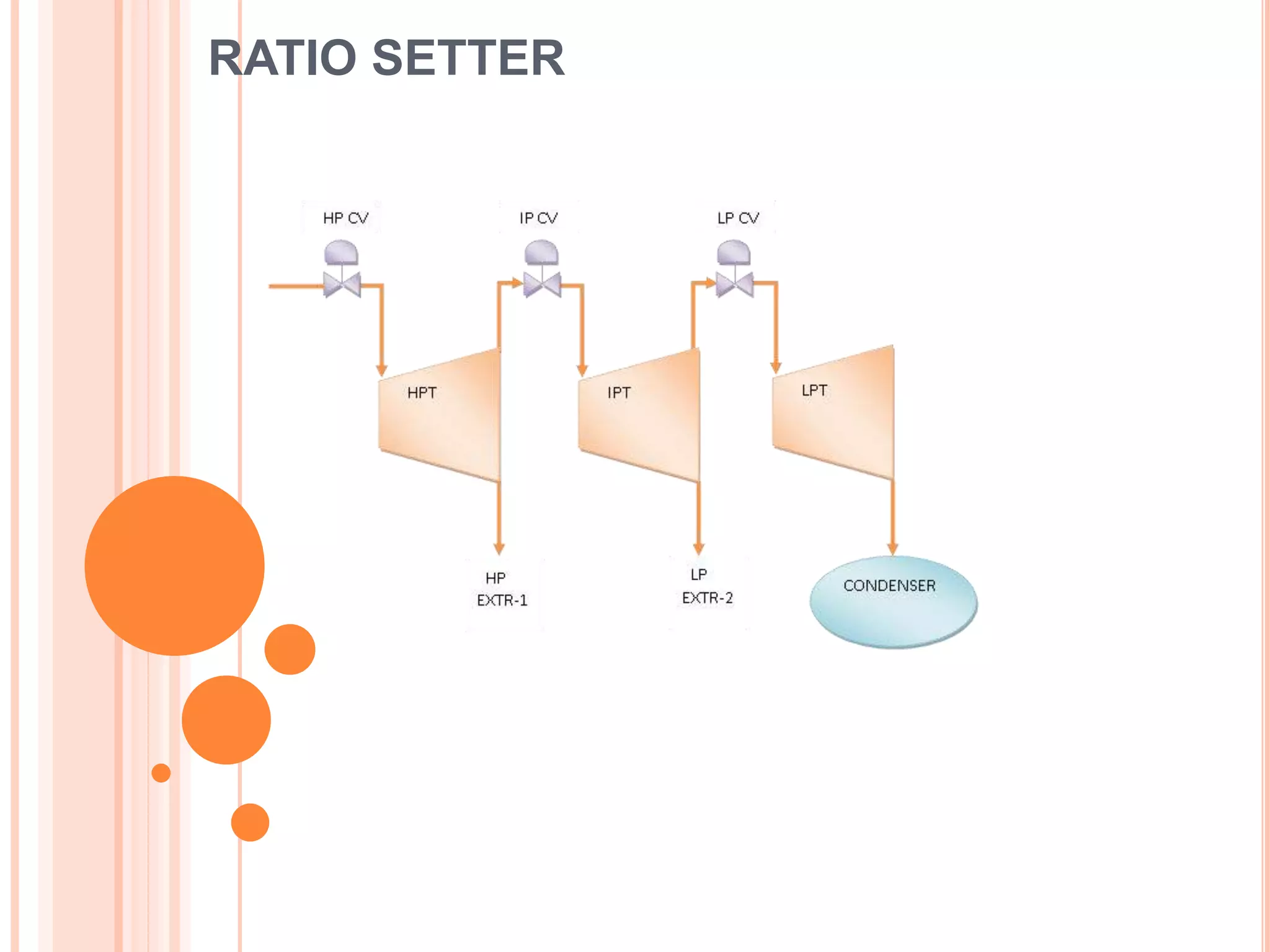
Function and details of the ratio setter in maintaining internal pressure and operational stability.
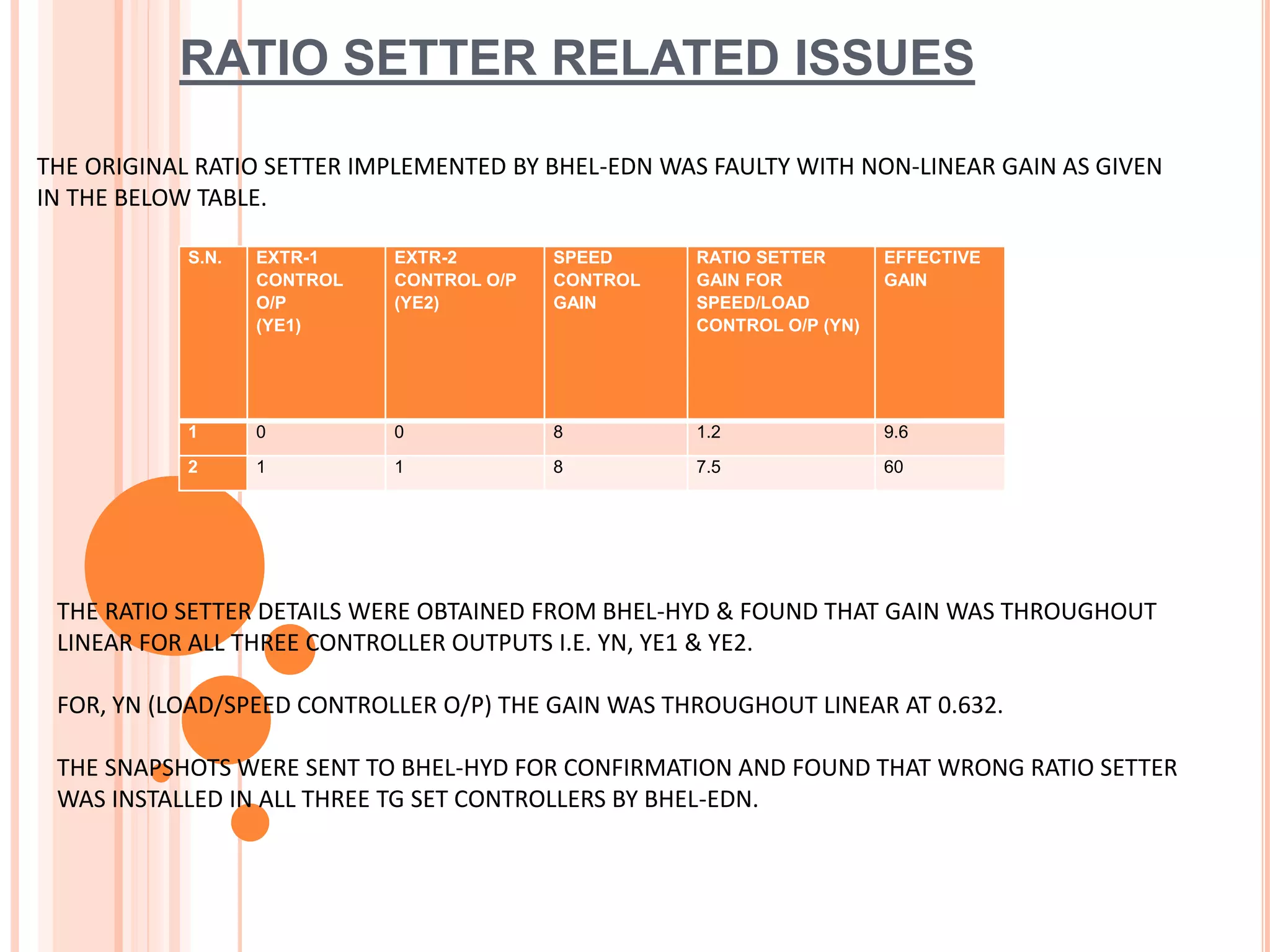
Major issues and changes implemented in the turbine governing system related to island conditions.
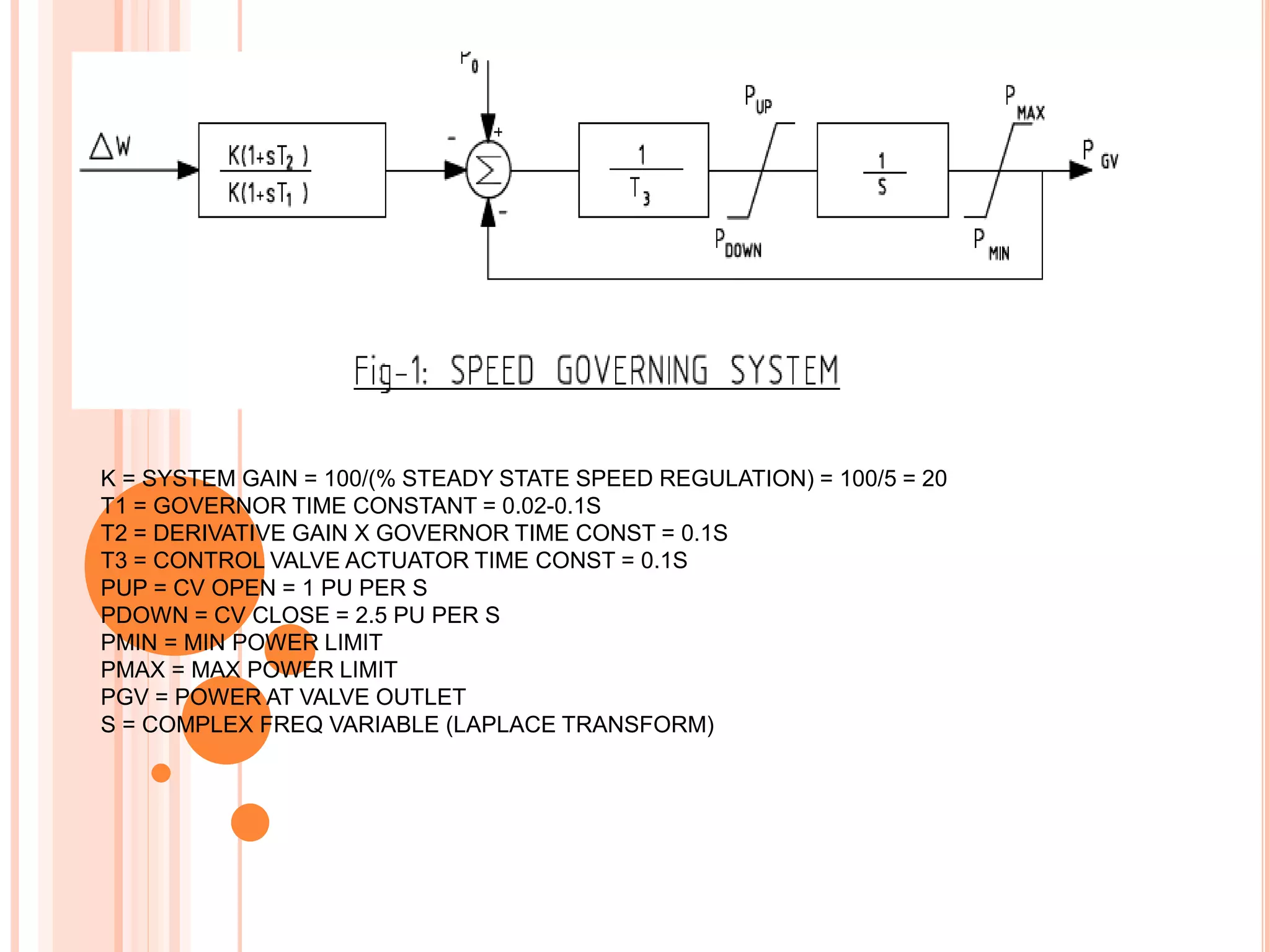
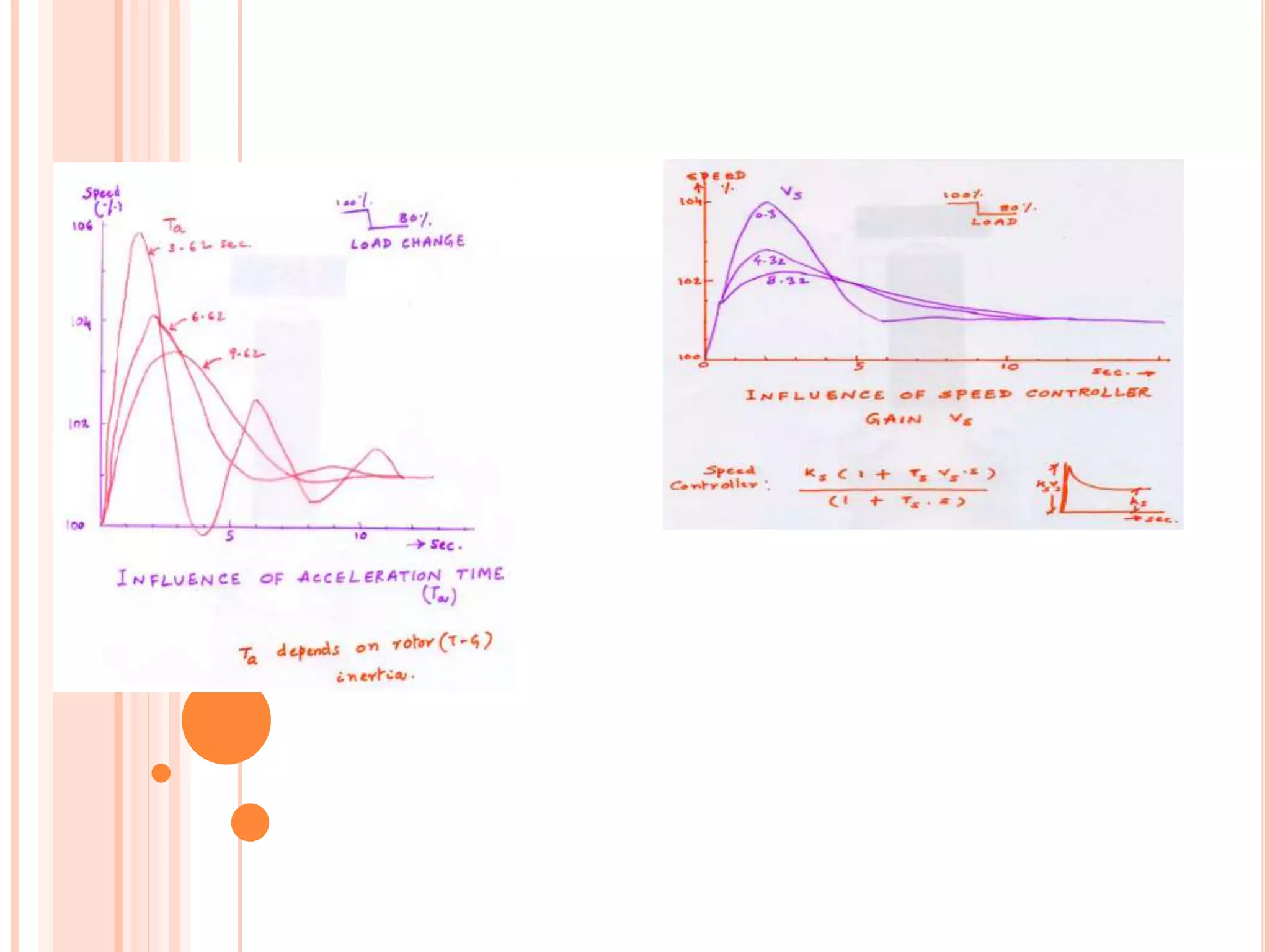
Presentation of control parameters, system gain calculations, and turbine time constants.
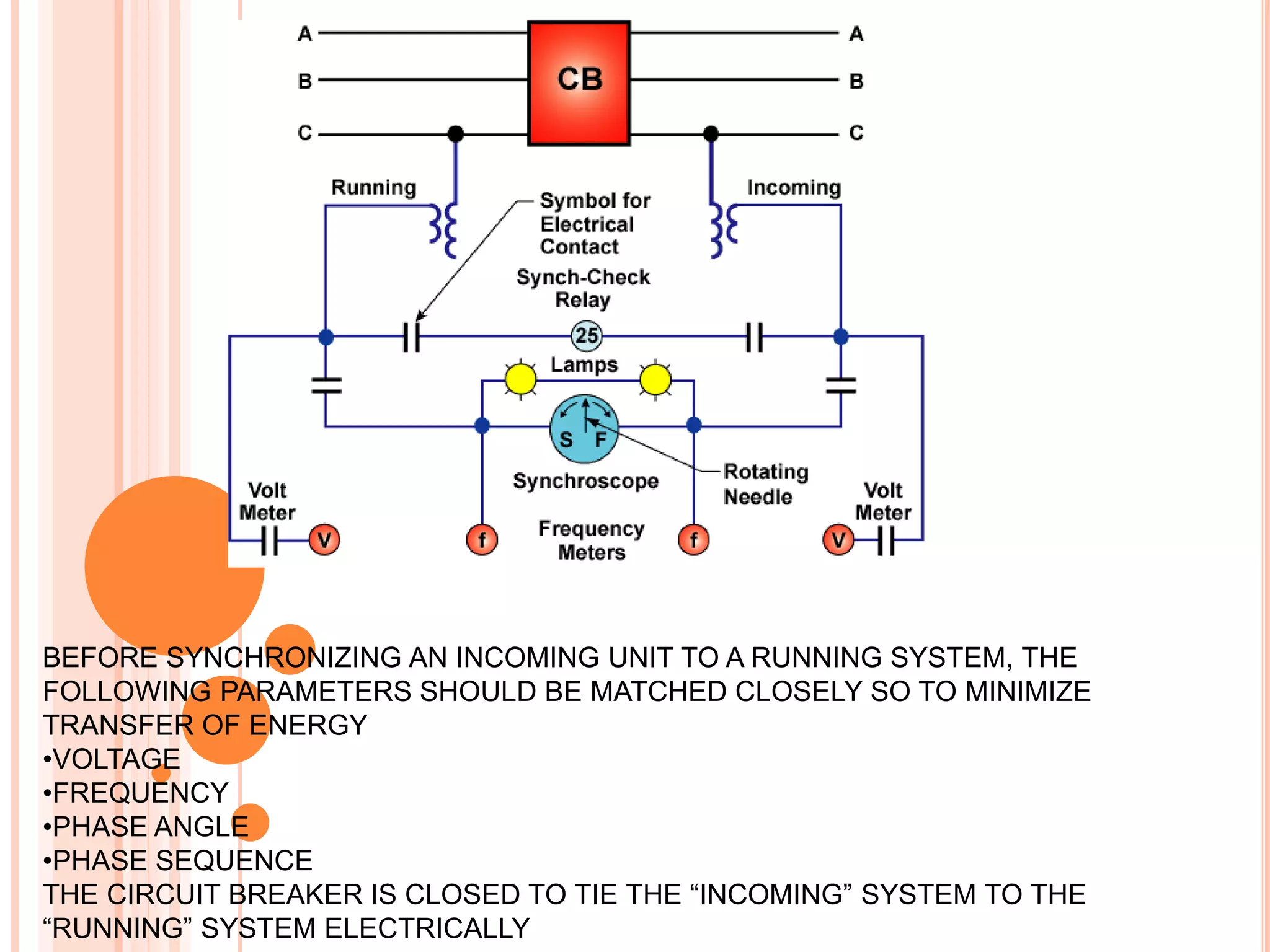
Parameters to match for minimizing energy transfer when synchronizing a new unit.
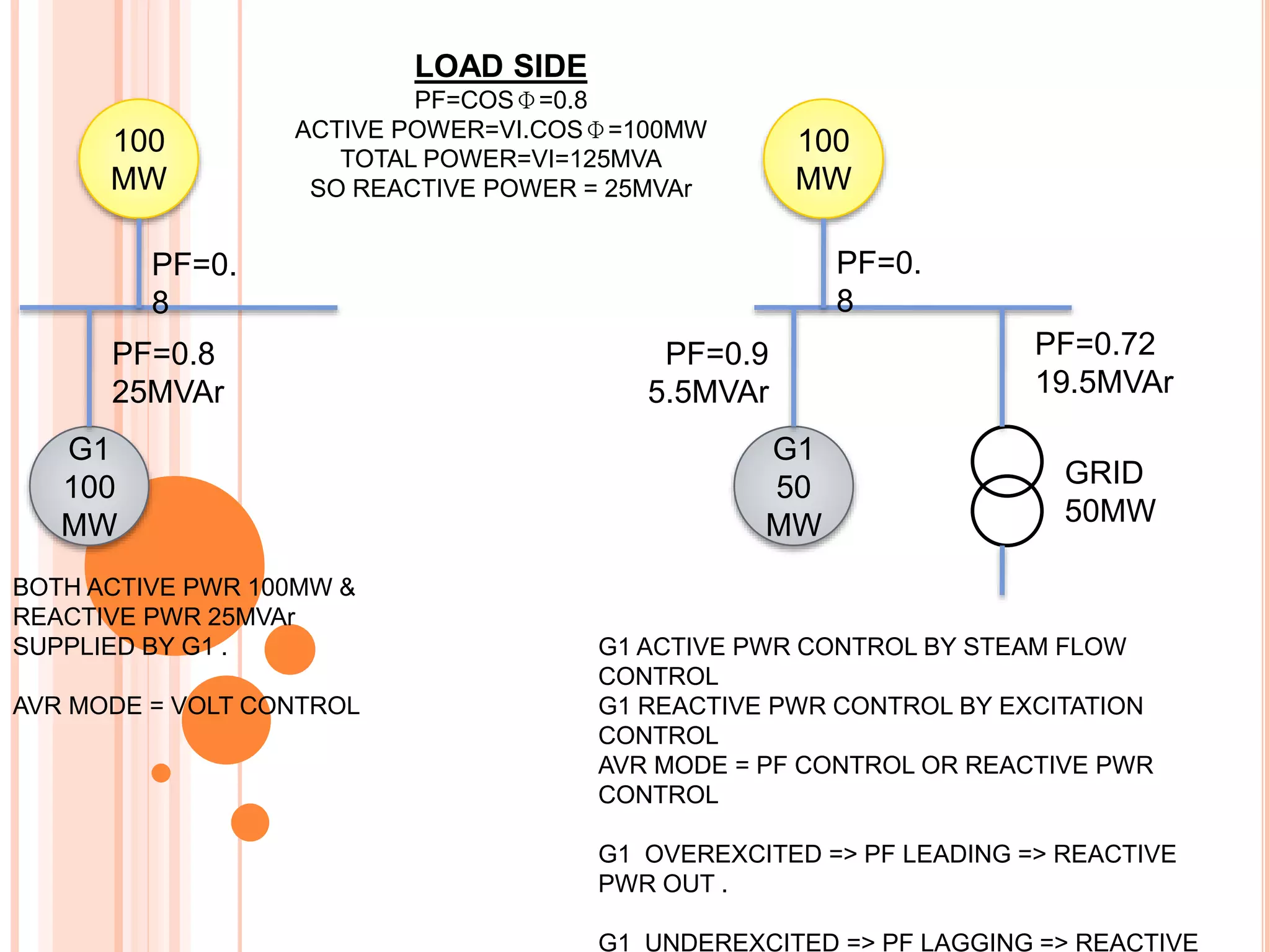
Functioning of generator electrical fields, calculations for power factor, and reactive power.
Discussion on capability curve zones and their thermal and operational implications on generators.
Closing thanks and wrap-up of the presentation.