1-Basic components of a control system-15-07-2024.pptx
1.
CONTROL SYSTEMS
Dr. NishaJ S
Assistant Professor Senior Grade.1
School of Electronics Engineering
Vellore Institute of Technology
4.
Text book
Norman Nise– Control System Engg.
Reference books
1.Smarajit Ghosh, “ Control Systems (Theory
And Applications)”, Pearson Education,2005
2.Benjamin C Kuo. “Automatic Control System.”
8th Edition, John Wiley &Sons,2003.
3.R.C. Dorf And R.H. Bishop, “Modern Control Systems
(Examples And Design Problems)”, Pearson Education, 2004
4. M. Gopal, “Control Systems-Principles
And Design”,
Control Engineering”,
Pearson
Tata McGrawhill – 3nd Edn. 2002.
5. K. Ogata, “Modern
Edition.
5.
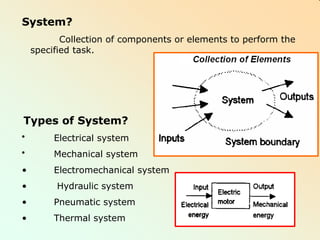
System?
Collection of componentsor elements to perform the
specified task.
Types of System?
• Electrical system
• Mechanical system
•
•
•
•
Electromechanical system
Hydraulic system
Pneumatic system
Thermal system
6.
is controlled by
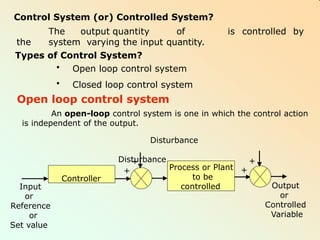
ControlSystem (or) Controlled System?
The output quantity of
the system varying the input quantity.
Input
or
Reference
or
Set value
Controller
Process or Plant
to be
controlled
+
+
+
+
Output
or
Controlled
Variable
Types of Control System?
• Open loop control system
• Closed loop control system
Open loop control system
An open-loop control system is one in which the control action
is independent of the output.
Disturbance
Disturbance
7.
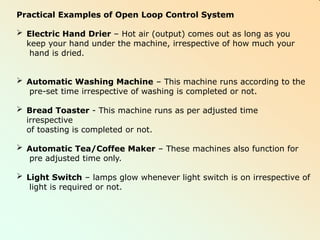
Practical Examples ofOpen Loop Control System
Electric Hand Drier – Hot air (output) comes out as long as you
keep your hand under the machine, irrespective of how much your
hand is dried.
Automatic Washing Machine – This machine runs according to the
pre-set time irrespective of washing is completed or not.
Bread Toaster - This machine runs as per adjusted time
irrespective
of toasting is completed or not.
Automatic Tea/Coffee Maker – These machines also function for
pre adjusted time only.
Light Switch – lamps glow whenever light switch is on irrespective of
light is required or not.
8.
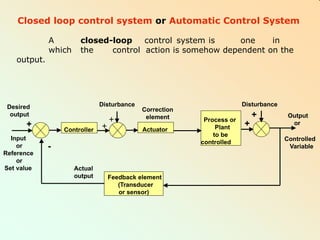
Closed loop controlsystem or Automatic Control System
A closed-loop control system is one in
which the control action is somehow dependent on the
output.
Controller
Process or
Plant
to be
controlled
Disturbance
+
+
Disturbance
+
+
Output
or
-
Feedback element
(Transducer
or sensor)
Desired
output
+
Input
or
Reference
or
Set value Actual
output
Controlled
Variable
Actuator
Correction
element
9.
Practical Examples ofClosed
Loop Control System
Automatic Electric Iron – Heating
elements are controlled by output
temperature of the iron.
Servo Voltage Stabilizer – Voltage
controller operates depending upon
output voltage of the system.
10.
Water Level Controller–Input
water is controlled by water level of
the reservoir.
An Air Conditioner – An air
conditioner functions depending upon
the temperature of the room.
operates depending upon
Cooling System in Car – It
the
temperature which it controls.
11.
Open loop controlsystem
Advantages
Always a stable system
Economic system
Disadvantages
Inaccurate output
Unreliable output
Closed loop control system
Advantage
Accurate output
Reliable output
Disadvantages
Costlier
Designing a stable CL system is
tedious
12.
Classifications of
Control
System
Continuous TimeFeedback
System
If the signals in all parts of a control system are continuous
functions of time, the system is classified as continuous time
feedback control system.
13.
Classifications of
Control
System
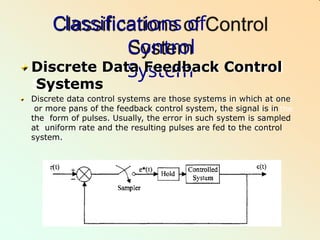
Discrete DataFeedback Control
Systems
Discrete data control systems are those systems in which at one
or more pans of the feedback control system, the signal is in
the form of pulses. Usually, the error in such system is sampled
at uniform rate and the resulting pulses are fed to the control
system.
Classifications of
Control
System
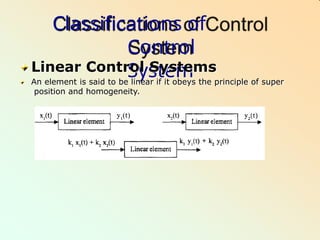
Non-Linear ControlSystems
Any system which does not obey superposition principle is said to
be a non-linear system. Physical systems are in general non-linear
and analysis of such systems is very complicated. Hence these
systems are usually linearised.
16.
Classifications of
Control
System
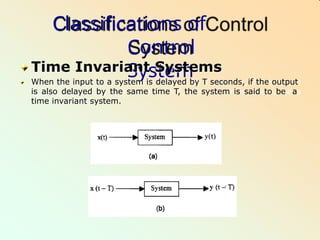
Time InvariantSystems
When the input to a system is delayed by T seconds, if the output
is also delayed by the same time T, the system is said to be a
time invariant system.
17.
Mathematical
Modeling
if a systemis composed of linear, lumped and time invariant
elements, its behaviour can be modelled by either linear algebraic
equations or linear differential equations with constant
coefficients.
If the input output relations are algebraic, the system is said to be
a static system.
if the relations are described by differential equations (the most
used) , the system is said to be a dynamic system.
Another most useful and common mathematical model is the
Transfer function' of the system.
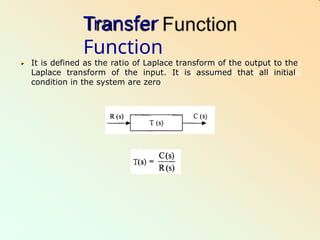
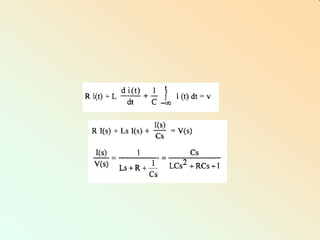
18.
Transfer
Function
It is definedas the ratio of Laplace transform of the output to the
Laplace transform of the input. It is assumed that all initial
condition in the system are zero