Downloaded 1,107 times



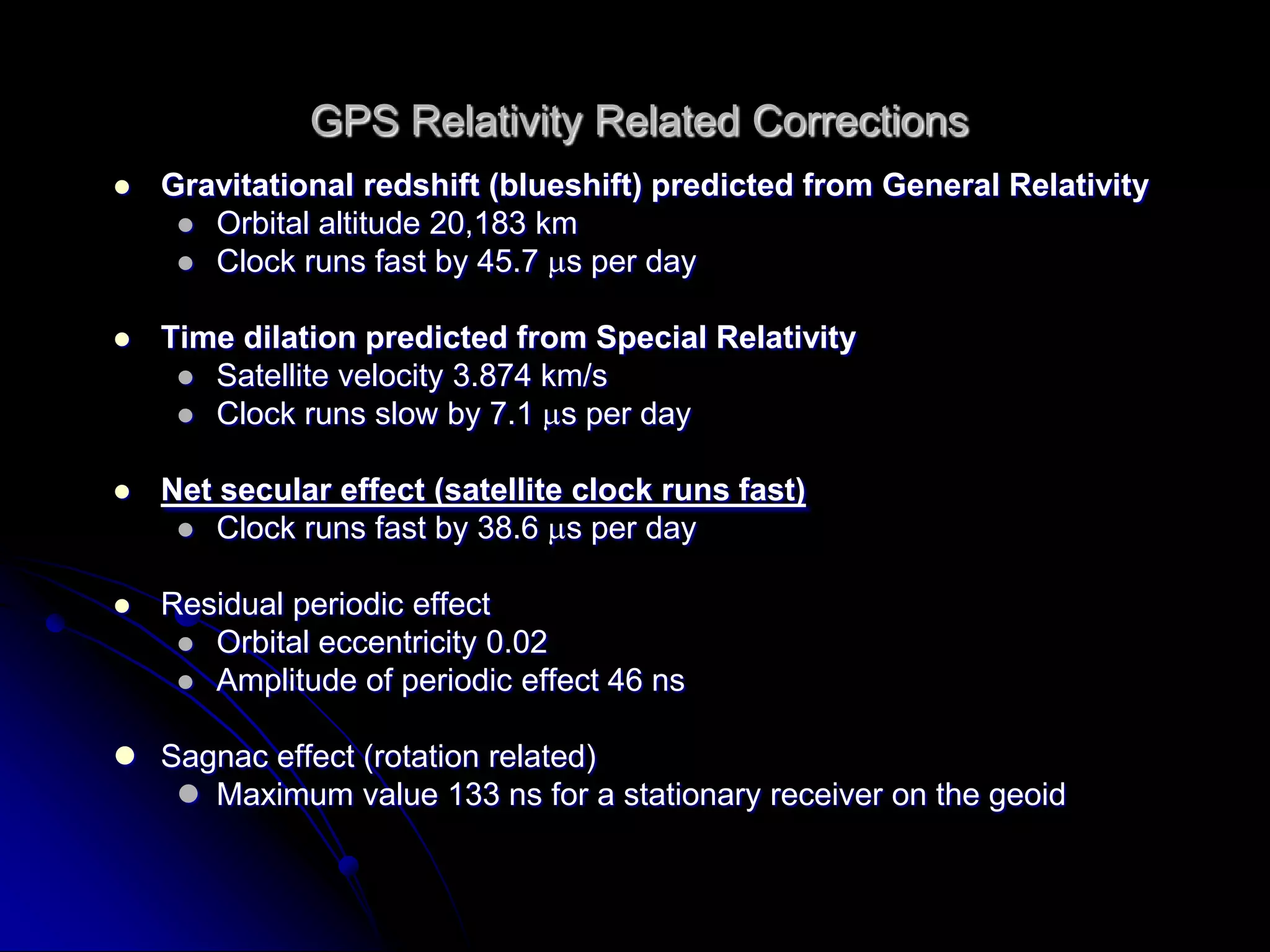
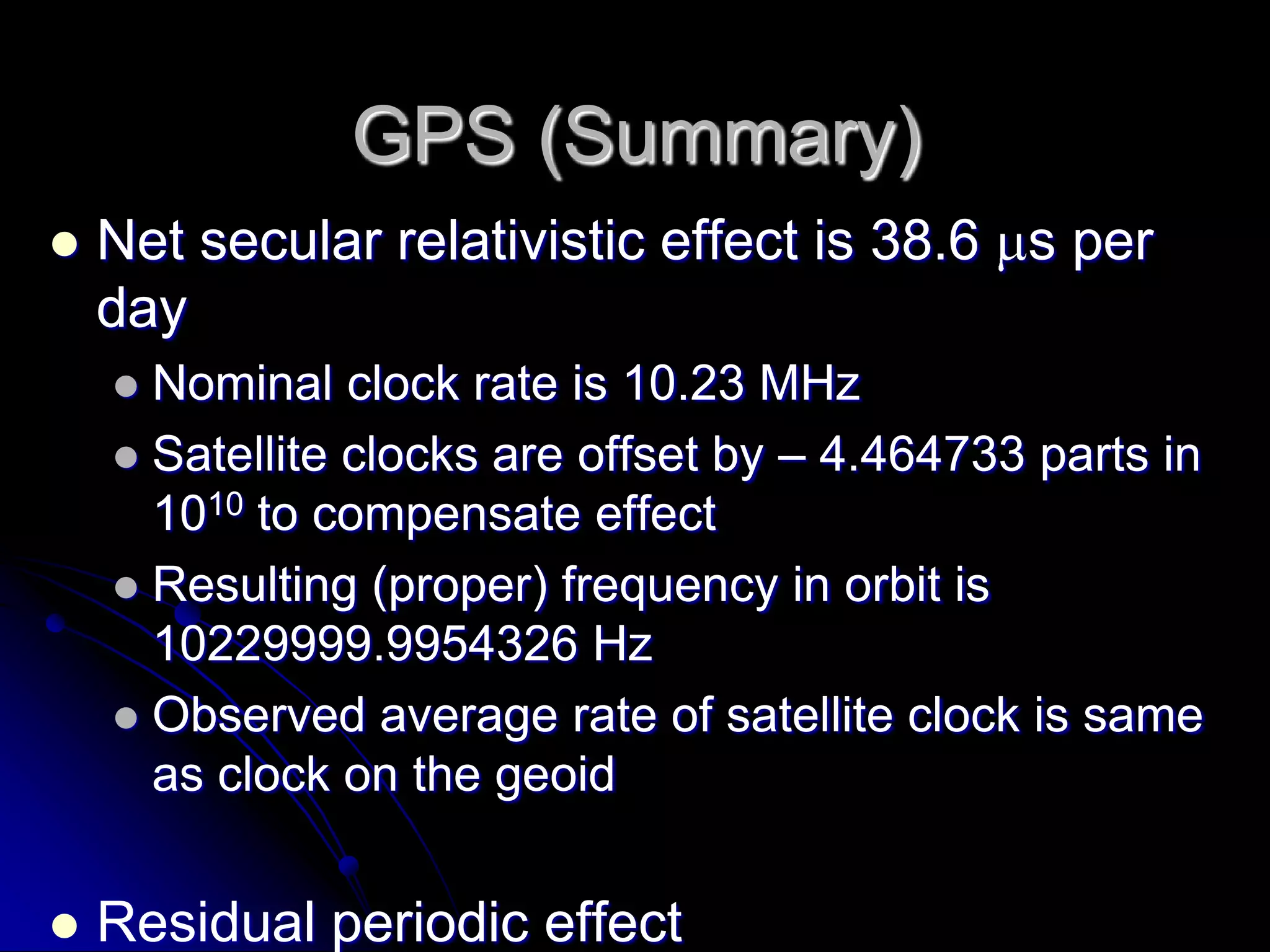




![Relativity is important in GPSAccording to the theory of relativity, due to their constant movement and height relative to the Earth-centered inertial reference frame, the clocks on the satellites are affected by their speed (special relativity) as well as their gravitational potential (general relativity). For the GPS satellites, general relativity predicts that the atomic clocks at GPS orbital altitudes will tick more rapidly, by about 45.9 microseconds (μs) per day, because they are in a weaker gravitational field than atomic clocks on Earth's surface. Special relativity predicts that atomic clocks moving at GPS orbital speeds will tick more slowly than stationary ground clocks by about 7.2 μs per day. When combined, the discrepancy is about 38 microseconds per day; a difference of 4.465 parts in 1010.[43]. To account for this, the frequency standard onboard each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[44] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.http://en.wikipedia.org/wiki/GPS](https://image.slidesharecdn.com/datumsandmapprojections02-090629170223-phpapp02/75/Map-Projections-Datums-GIS-and-GPS-for-Everyone-91-2048.jpg)









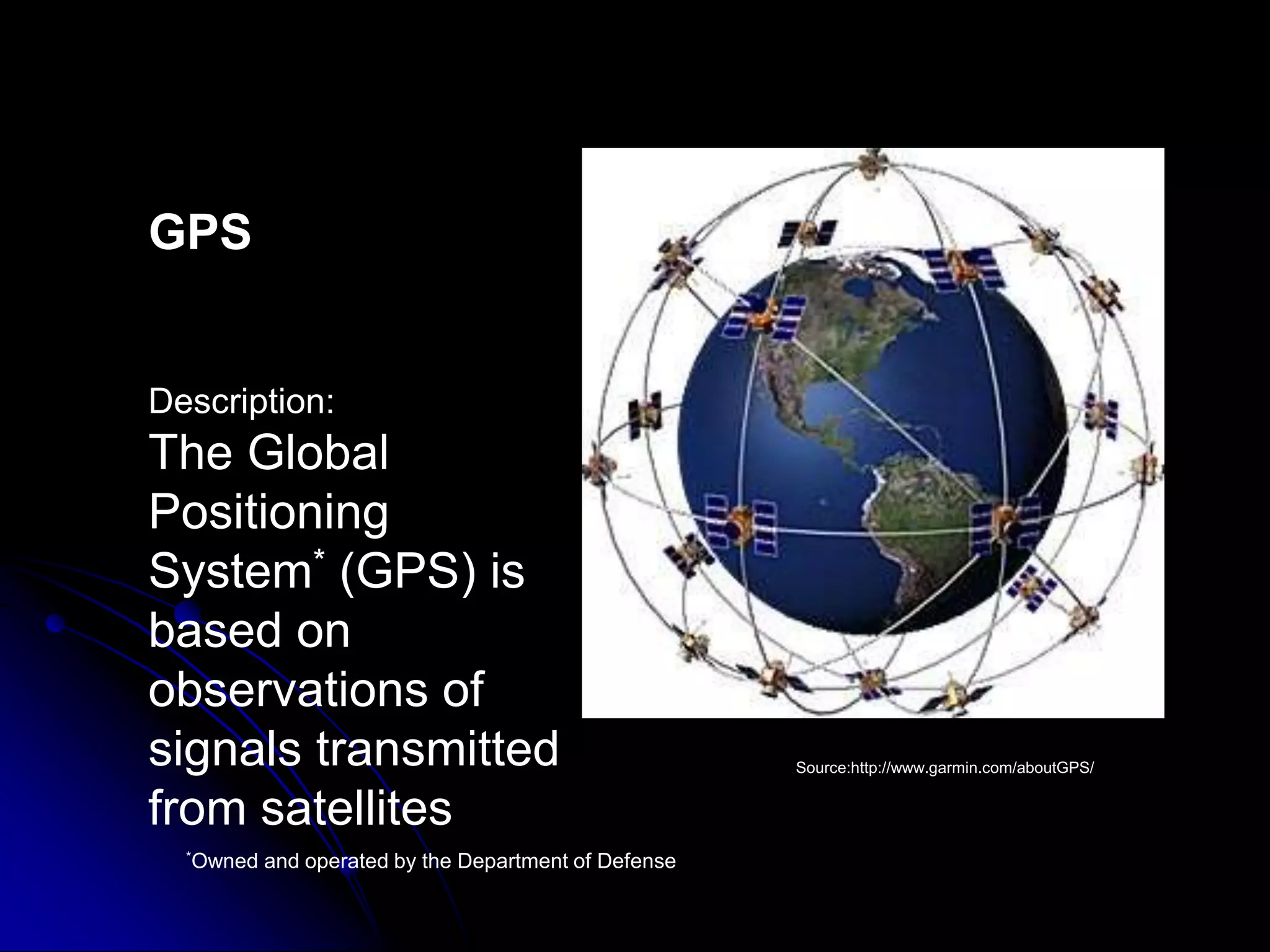
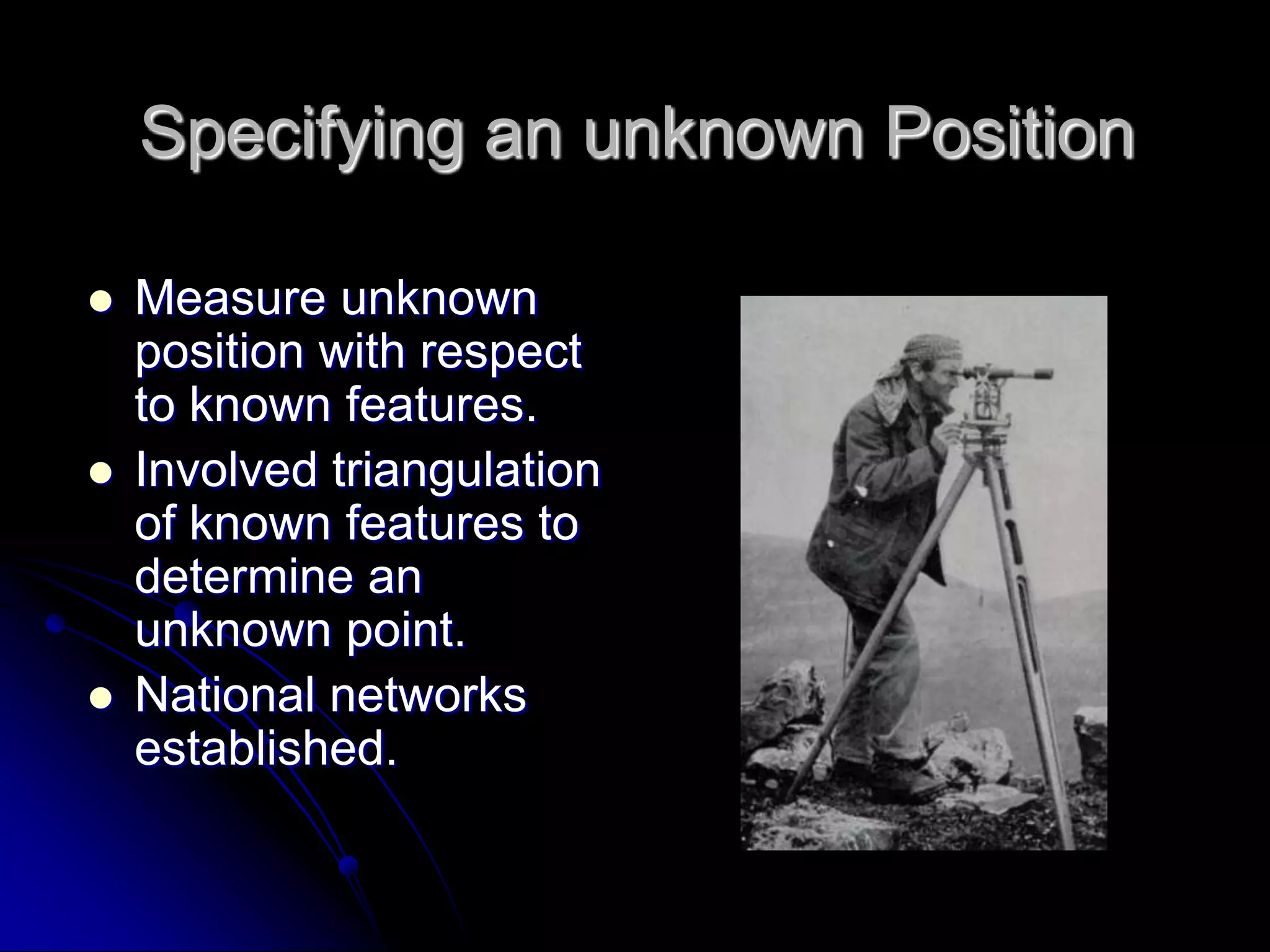
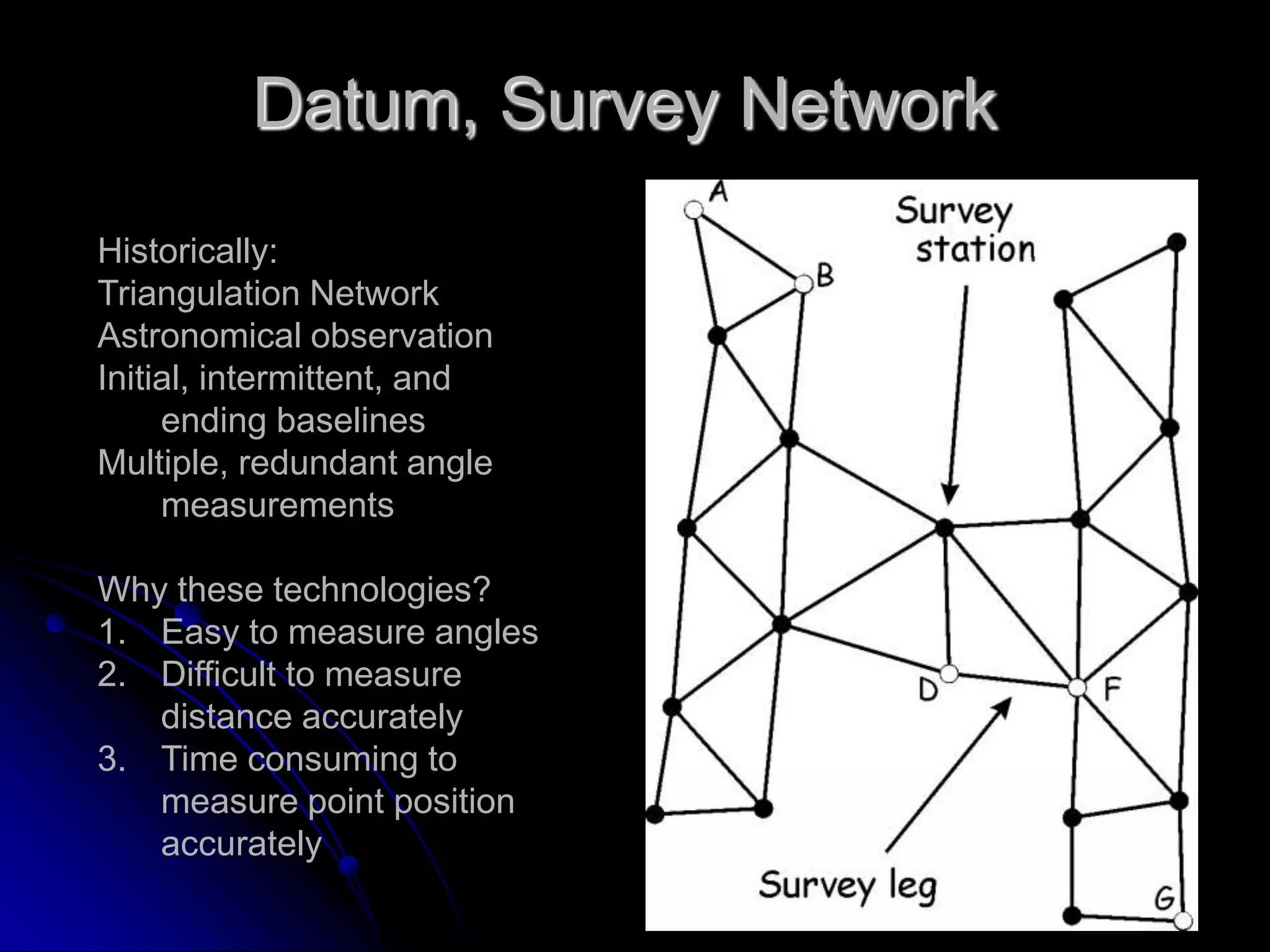
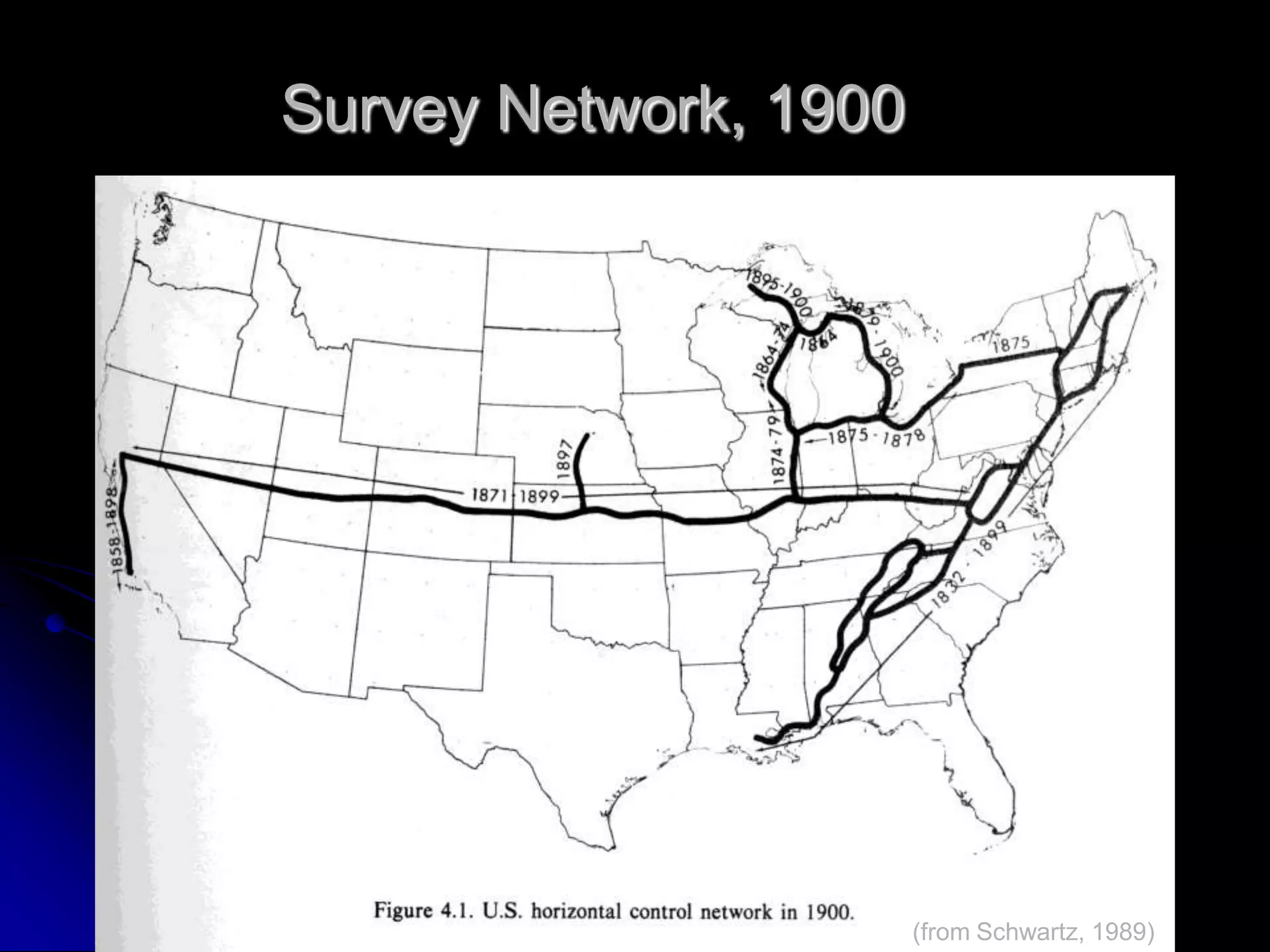
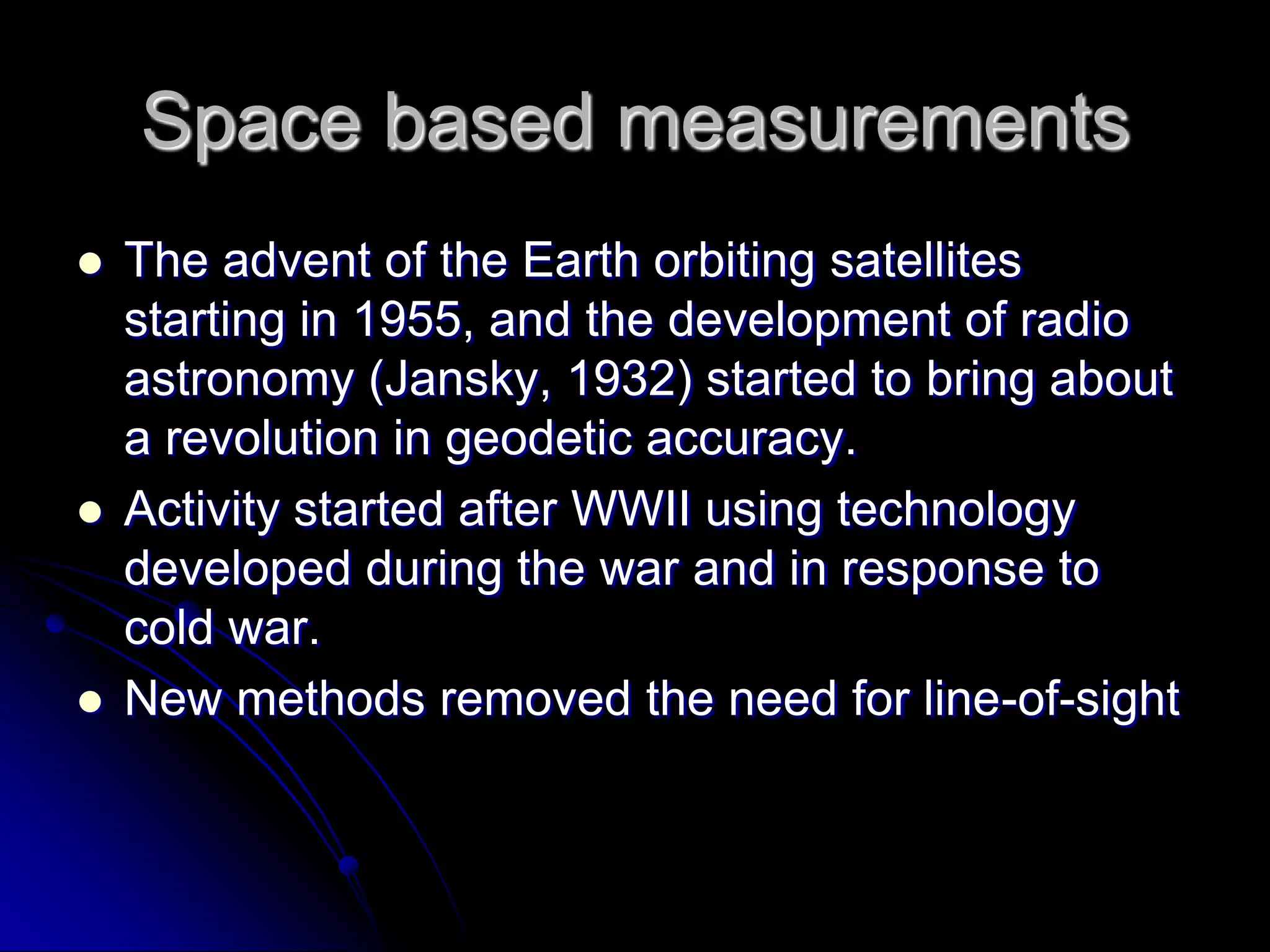
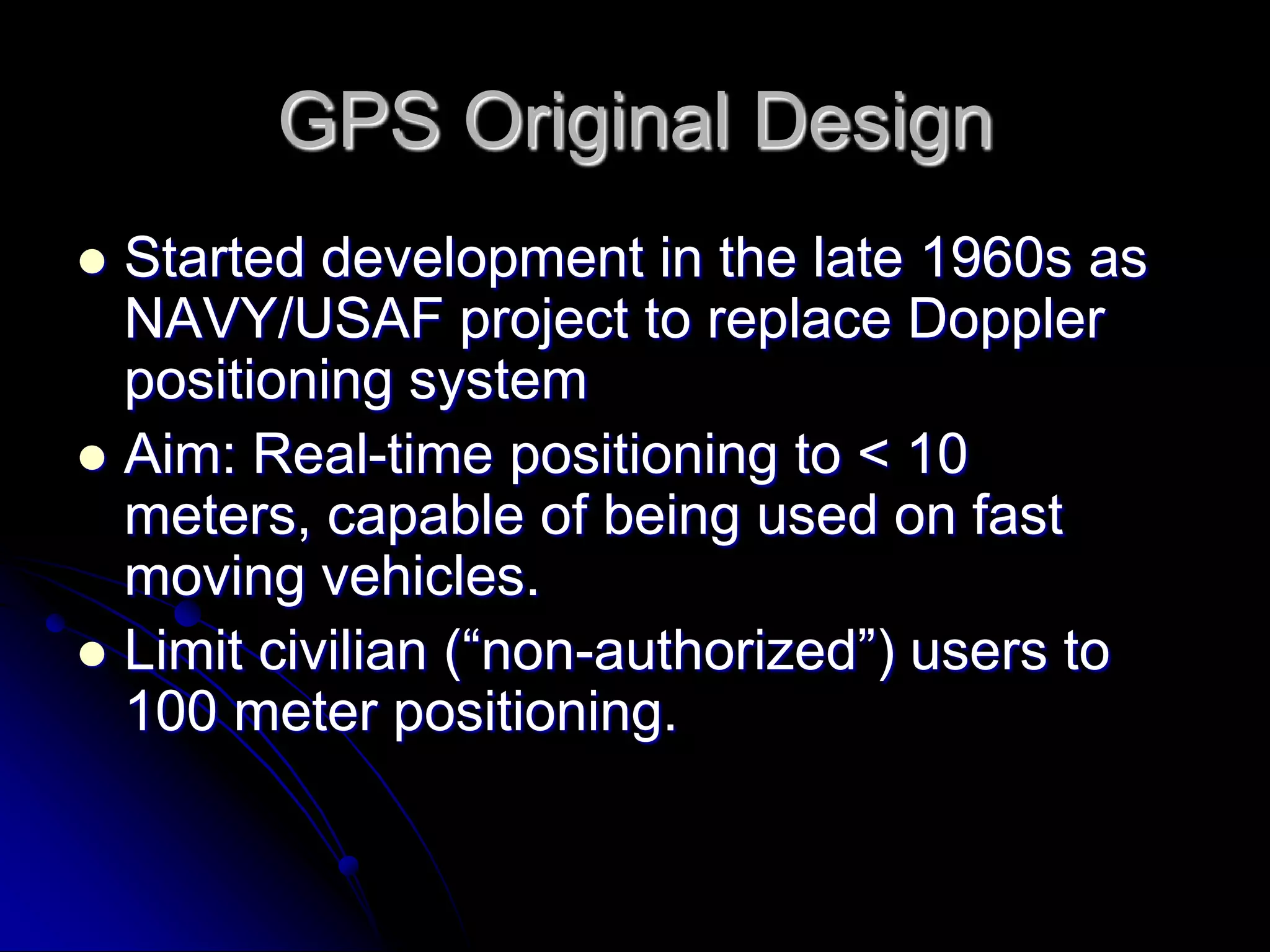
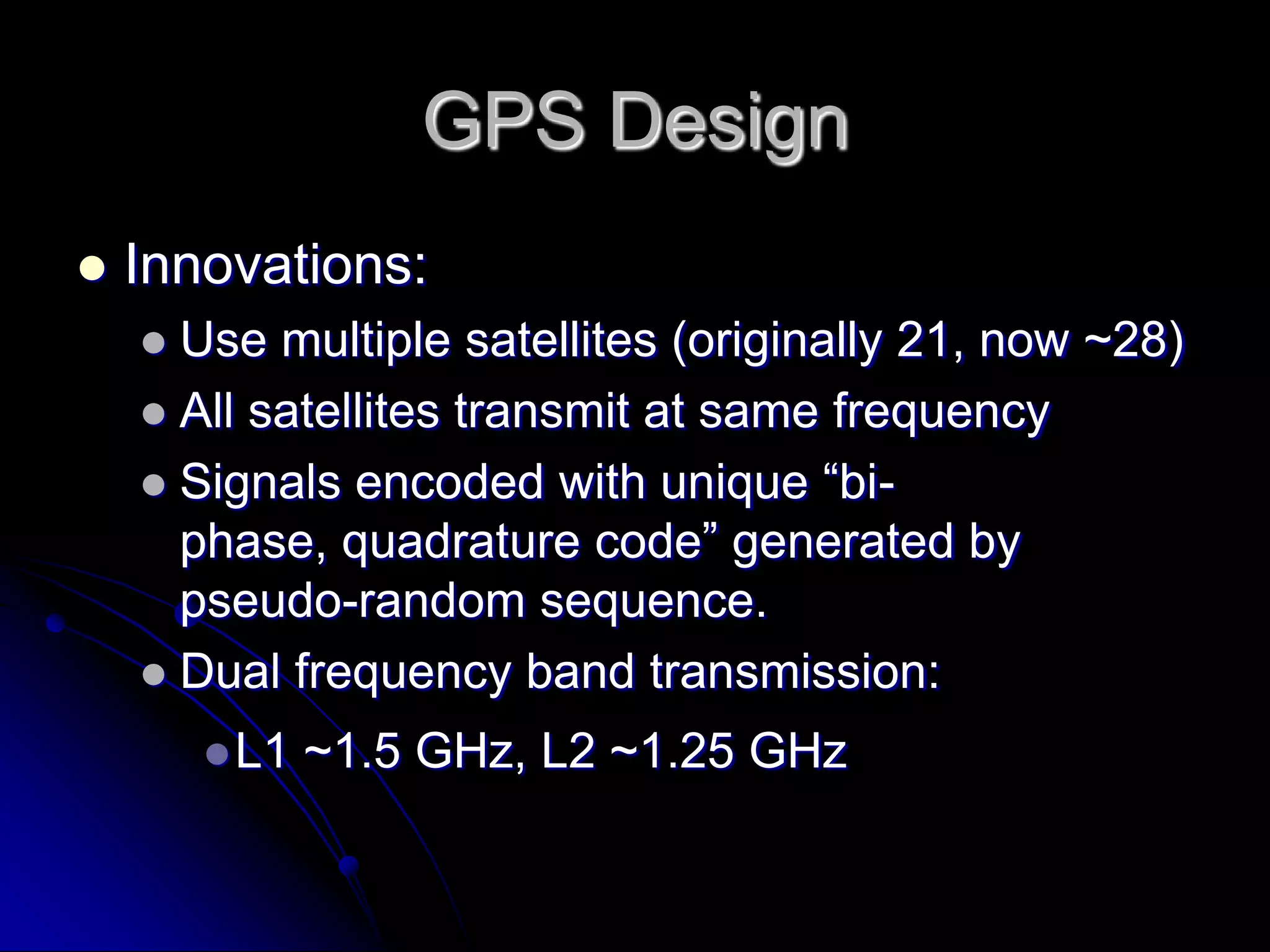
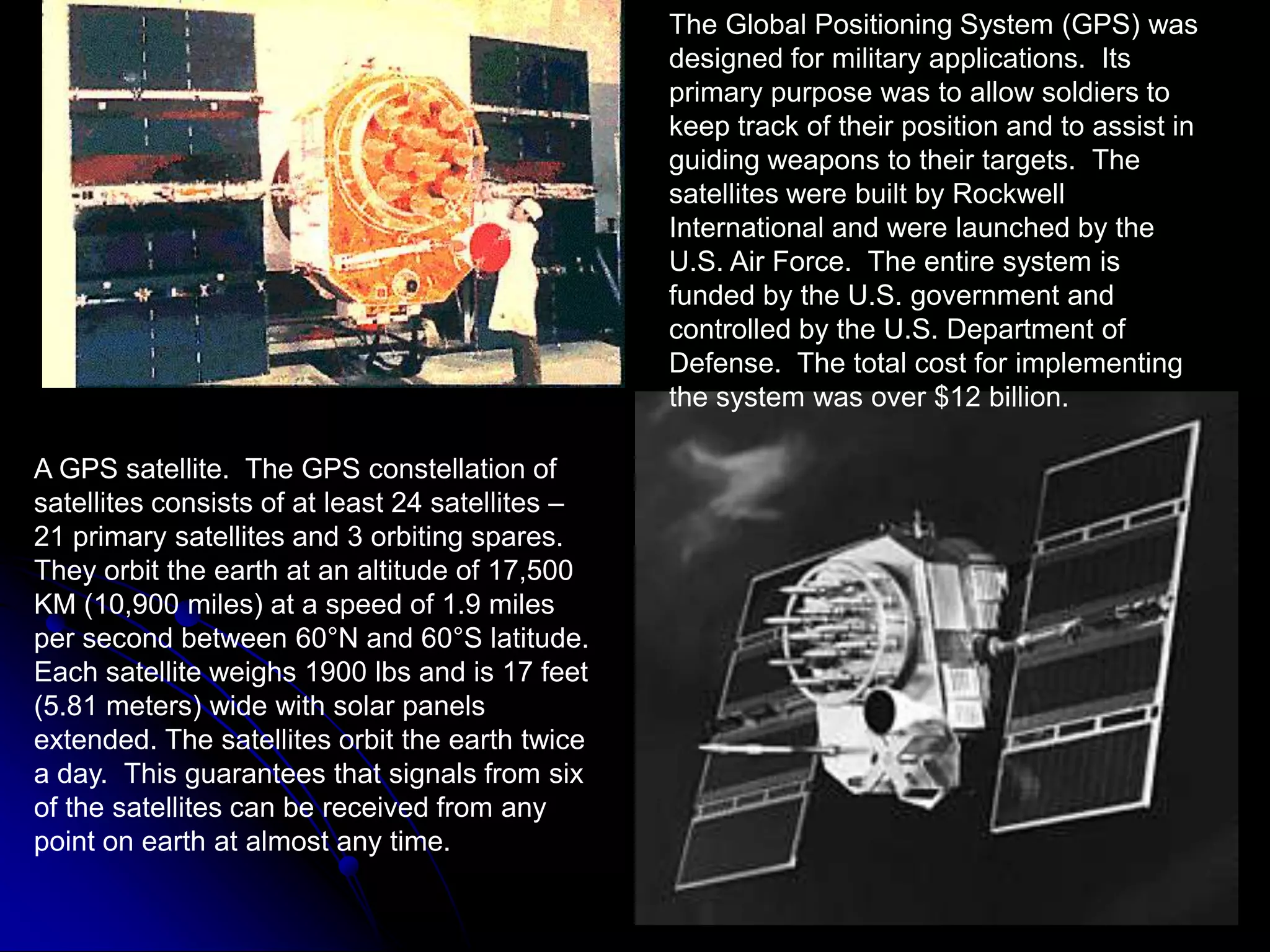
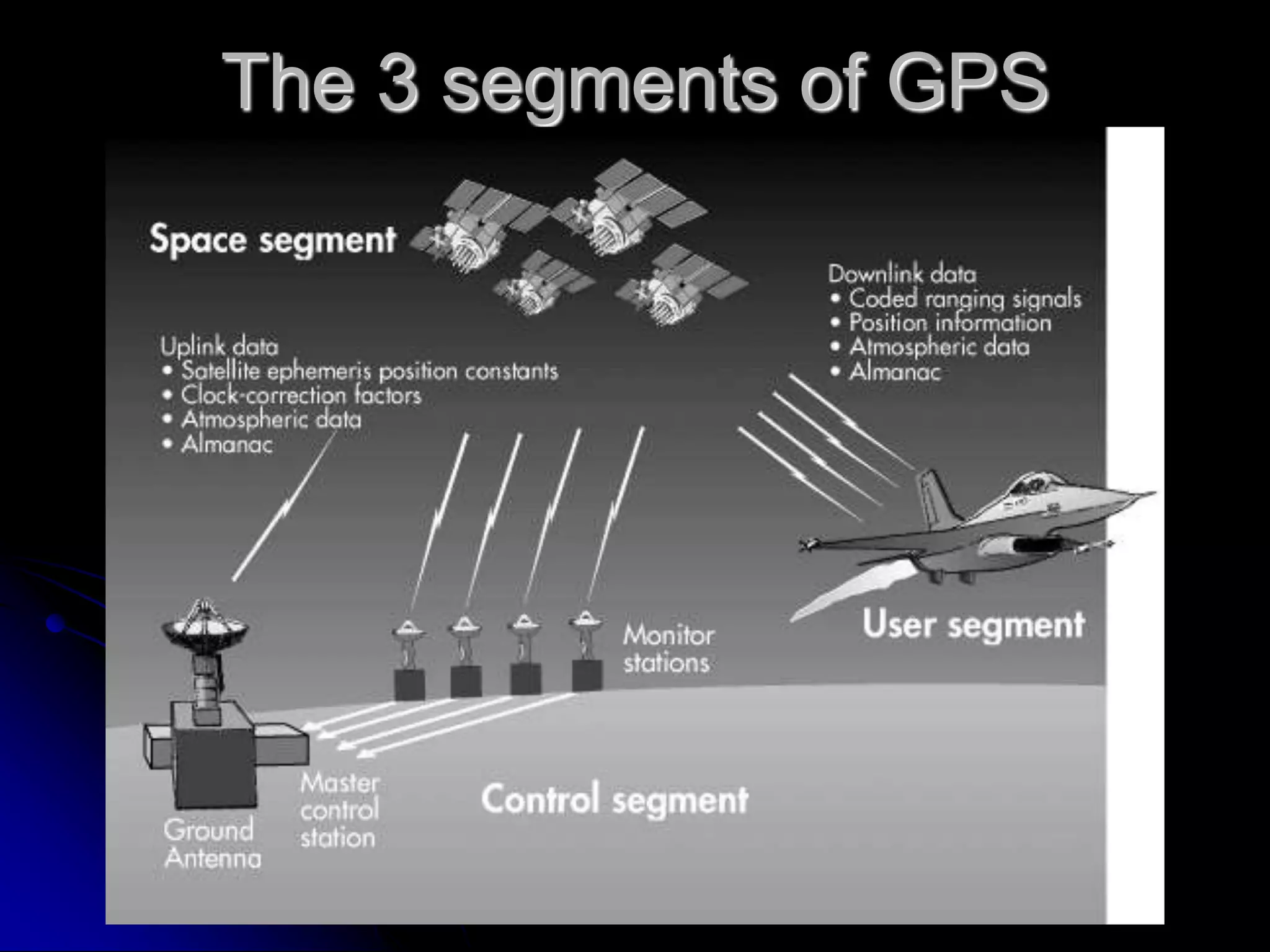
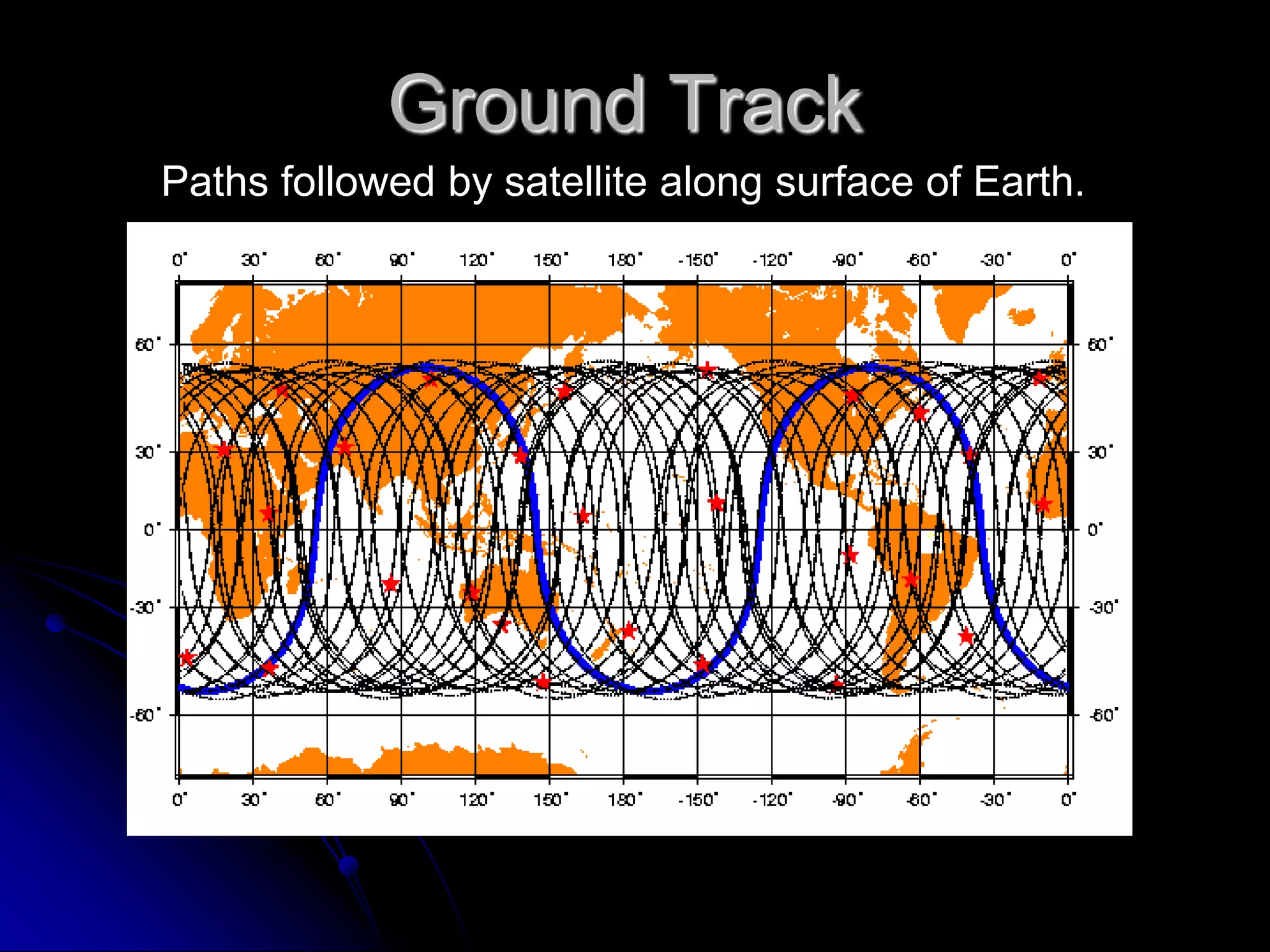
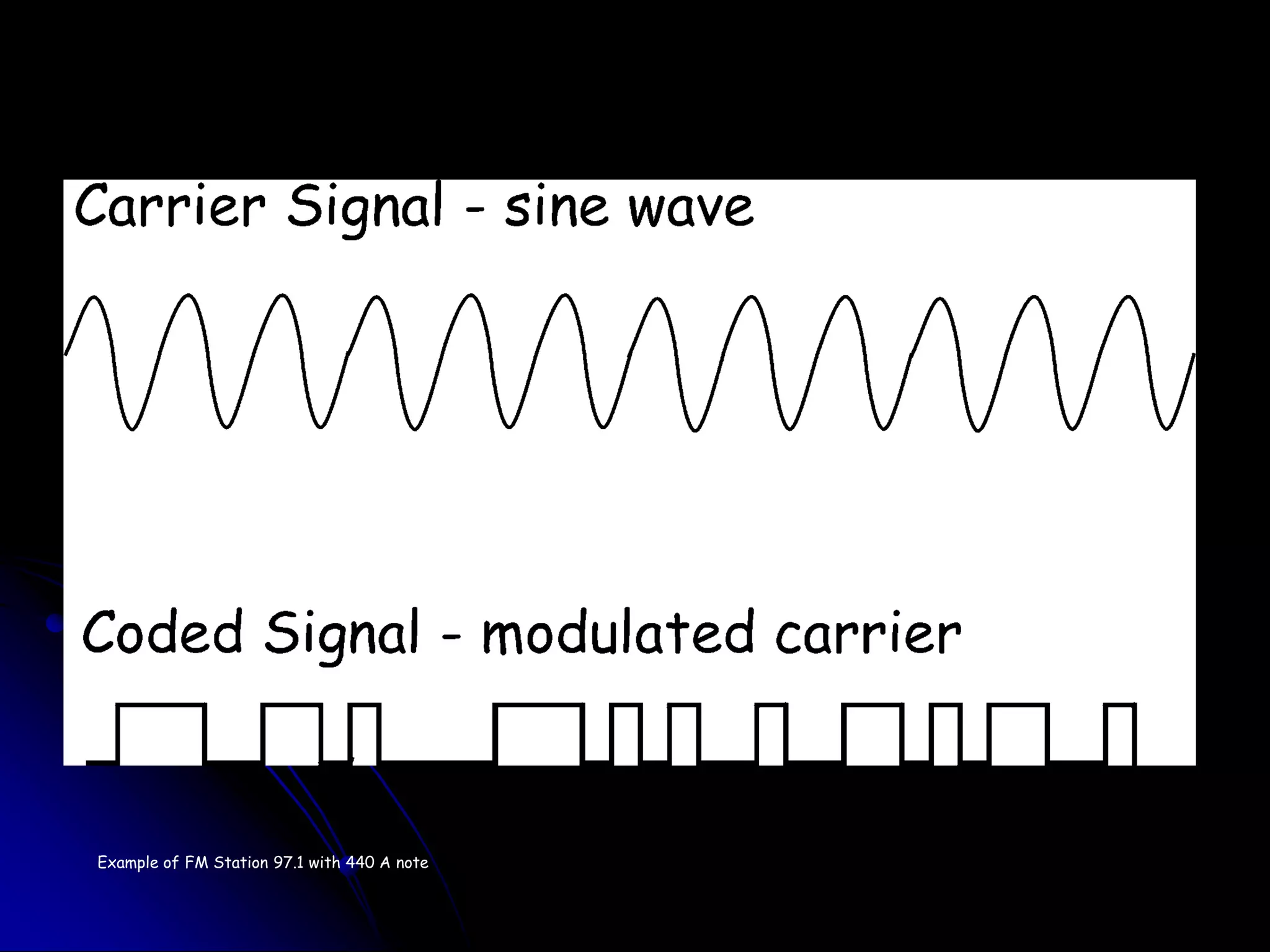
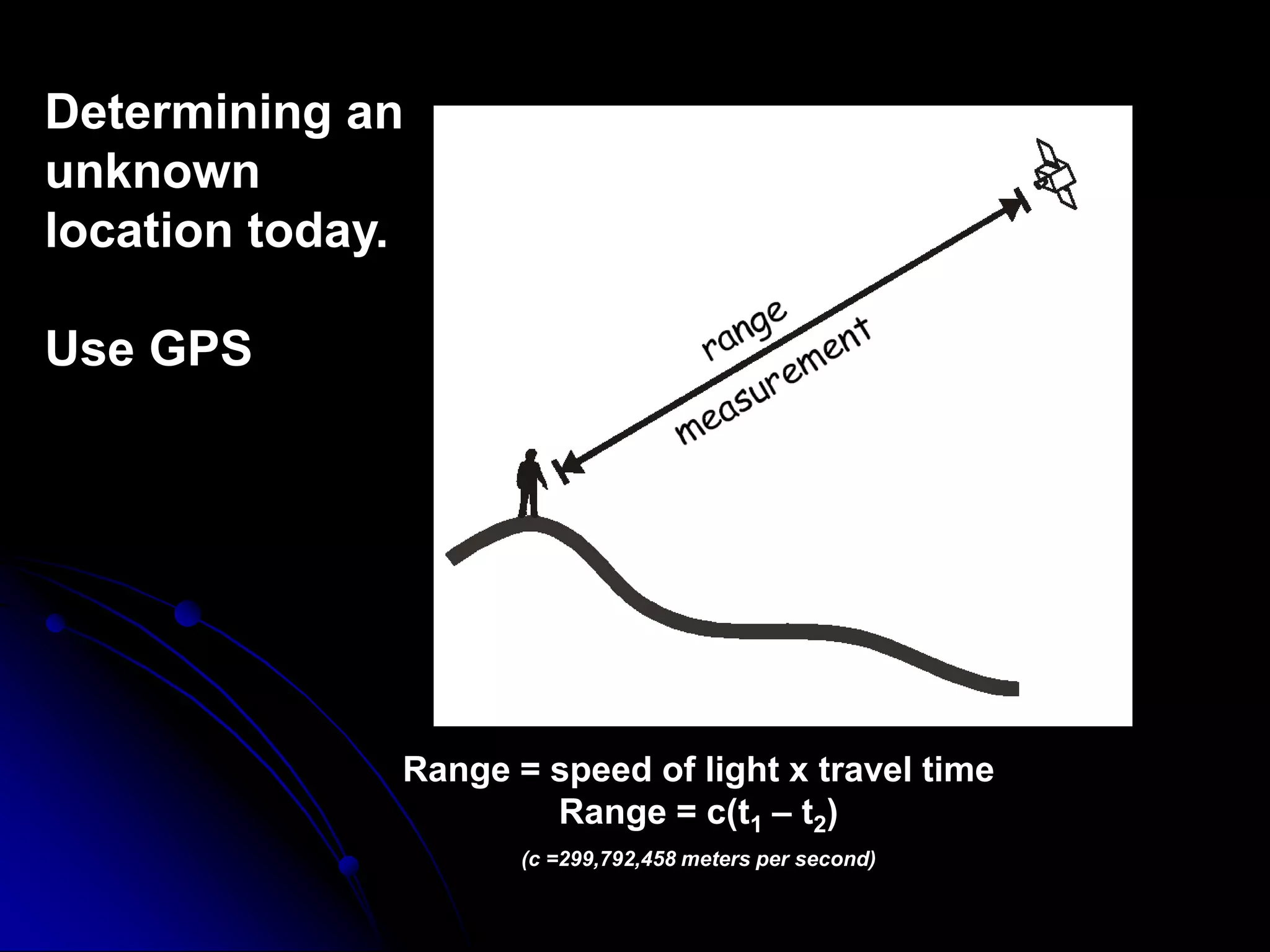
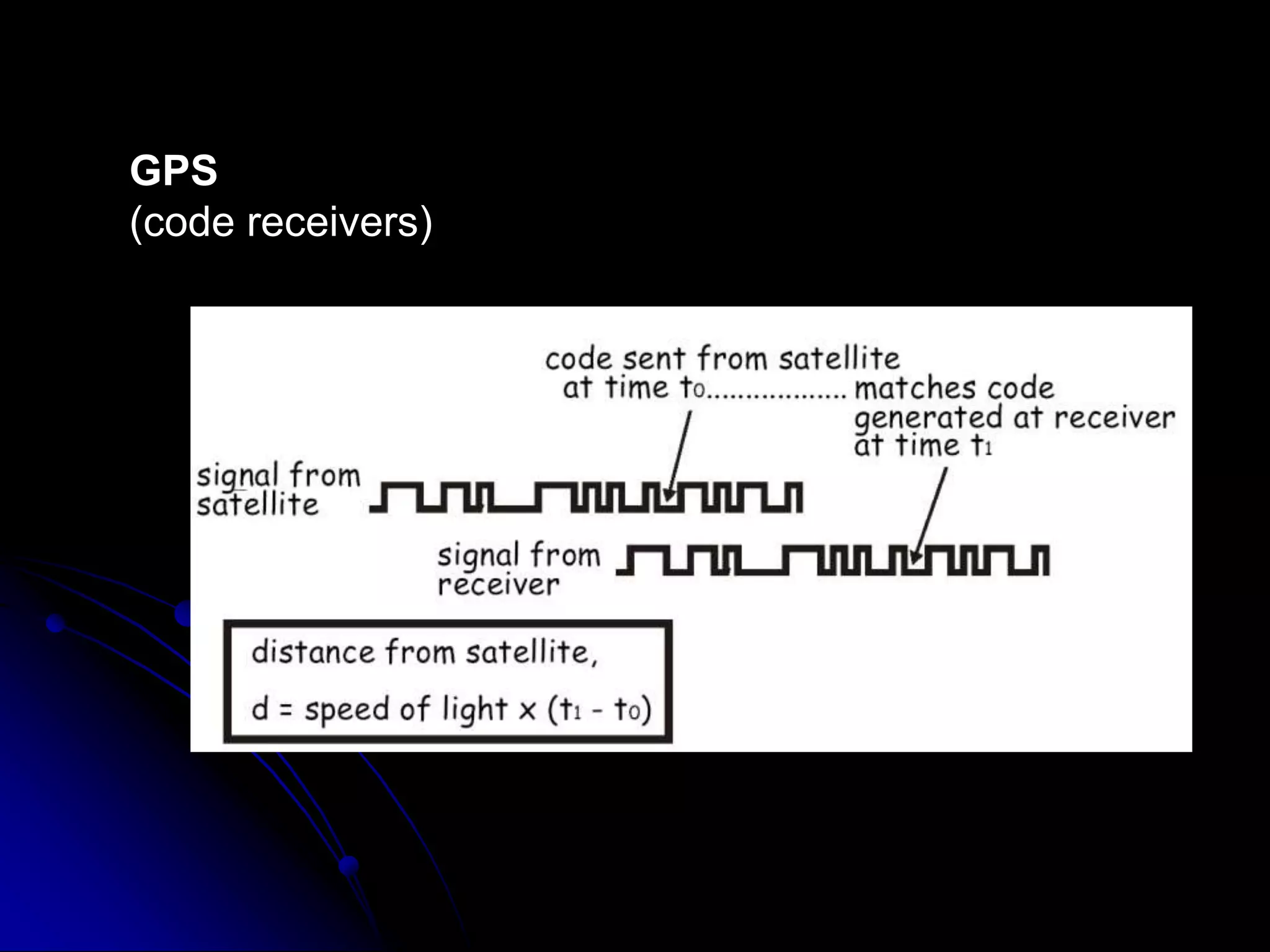
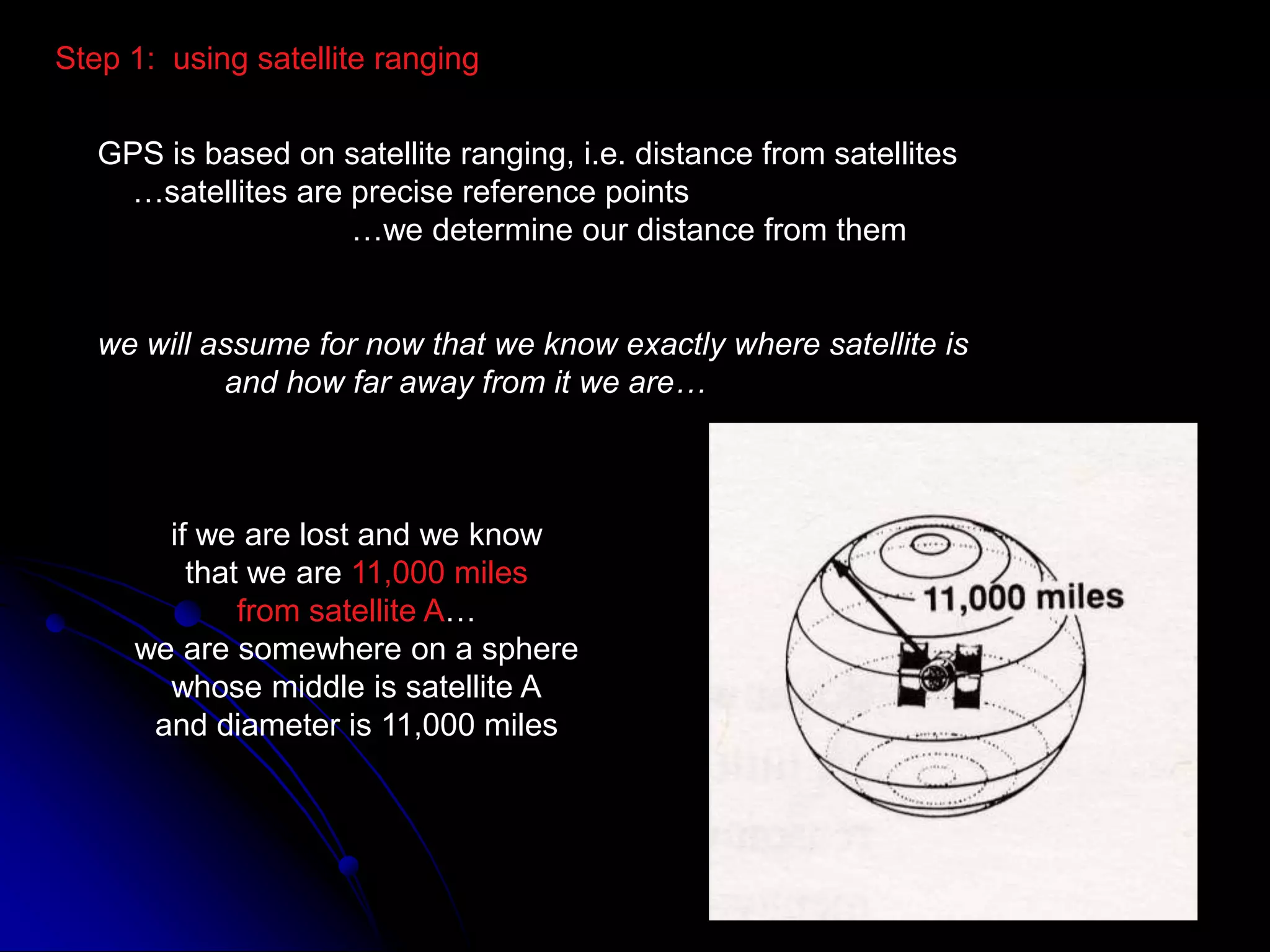
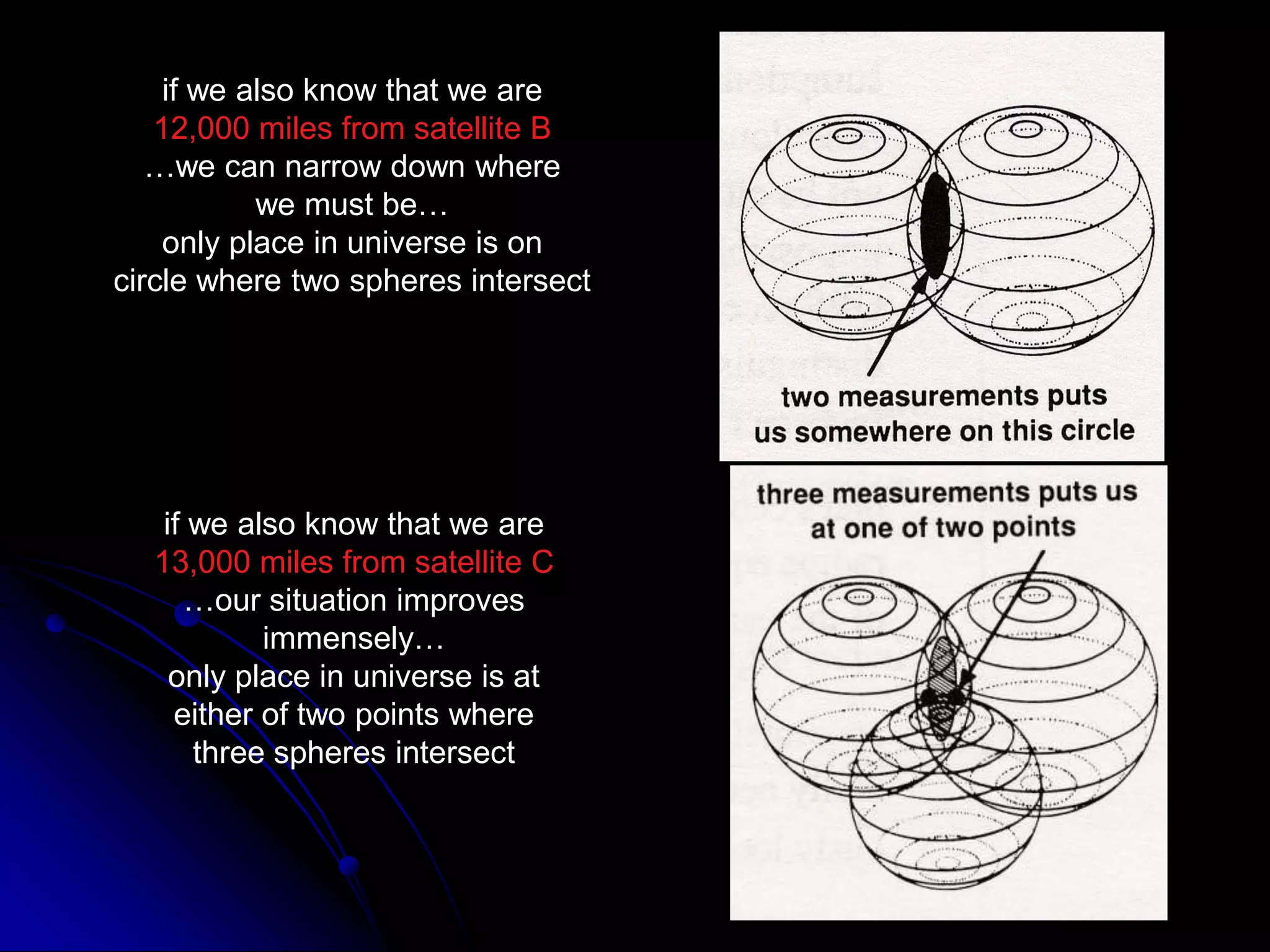
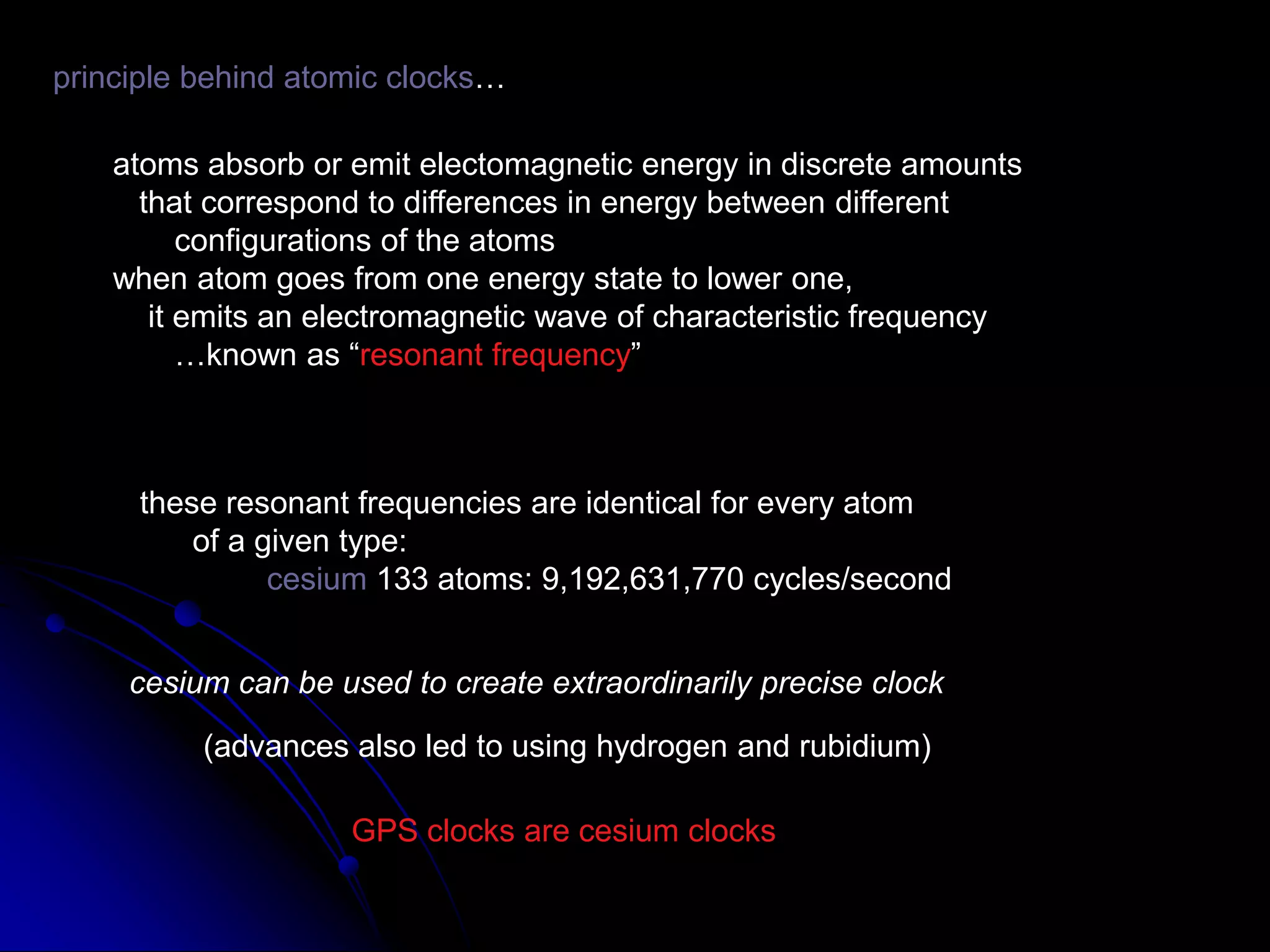
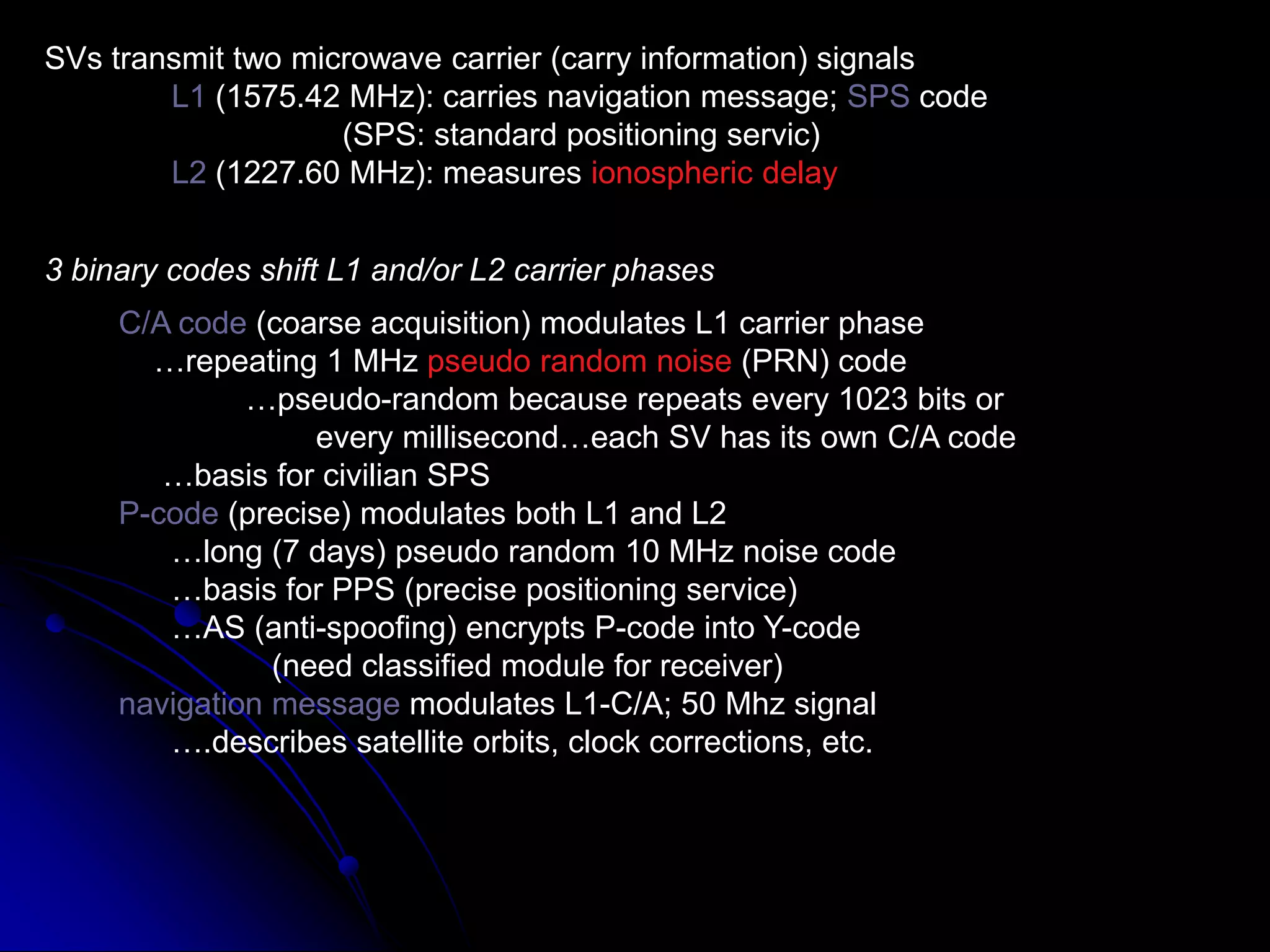
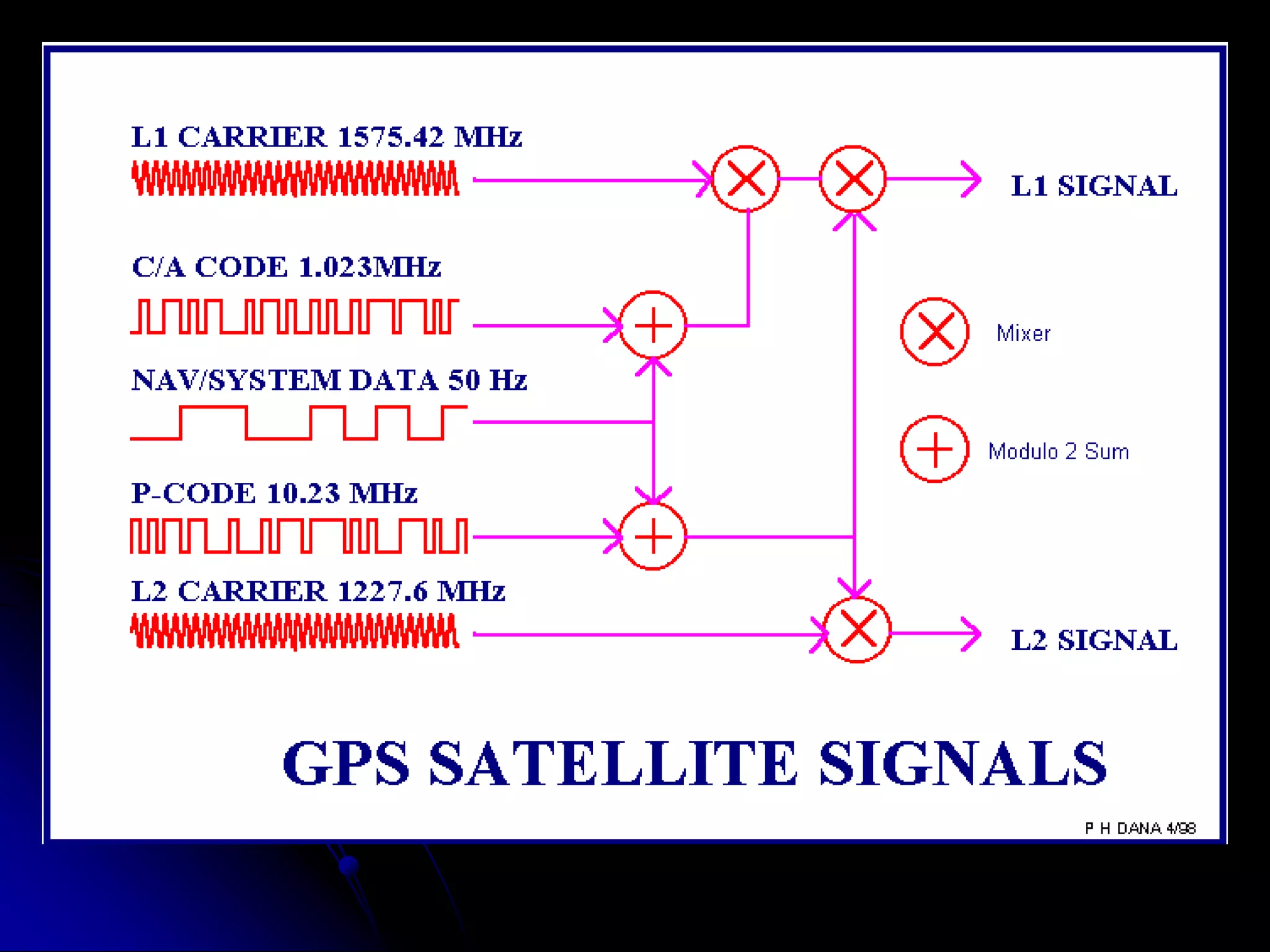
The document provides an overview of GPS (Global Positioning System) and related technologies: - GPS uses signals from satellites to determine position based on triangulating distances to multiple satellites. Originally developed for military purposes, it is now widely used for civilian navigation. - Early methods of determining position involved triangulating angles between known landmarks. GPS replaced this with satellites as reference points and measuring distances through signal travel times. - Advances like using multiple satellites in different orbital planes and transmitting dual frequencies allowed GPS to provide global coverage and high-precision positioning anywhere on Earth.
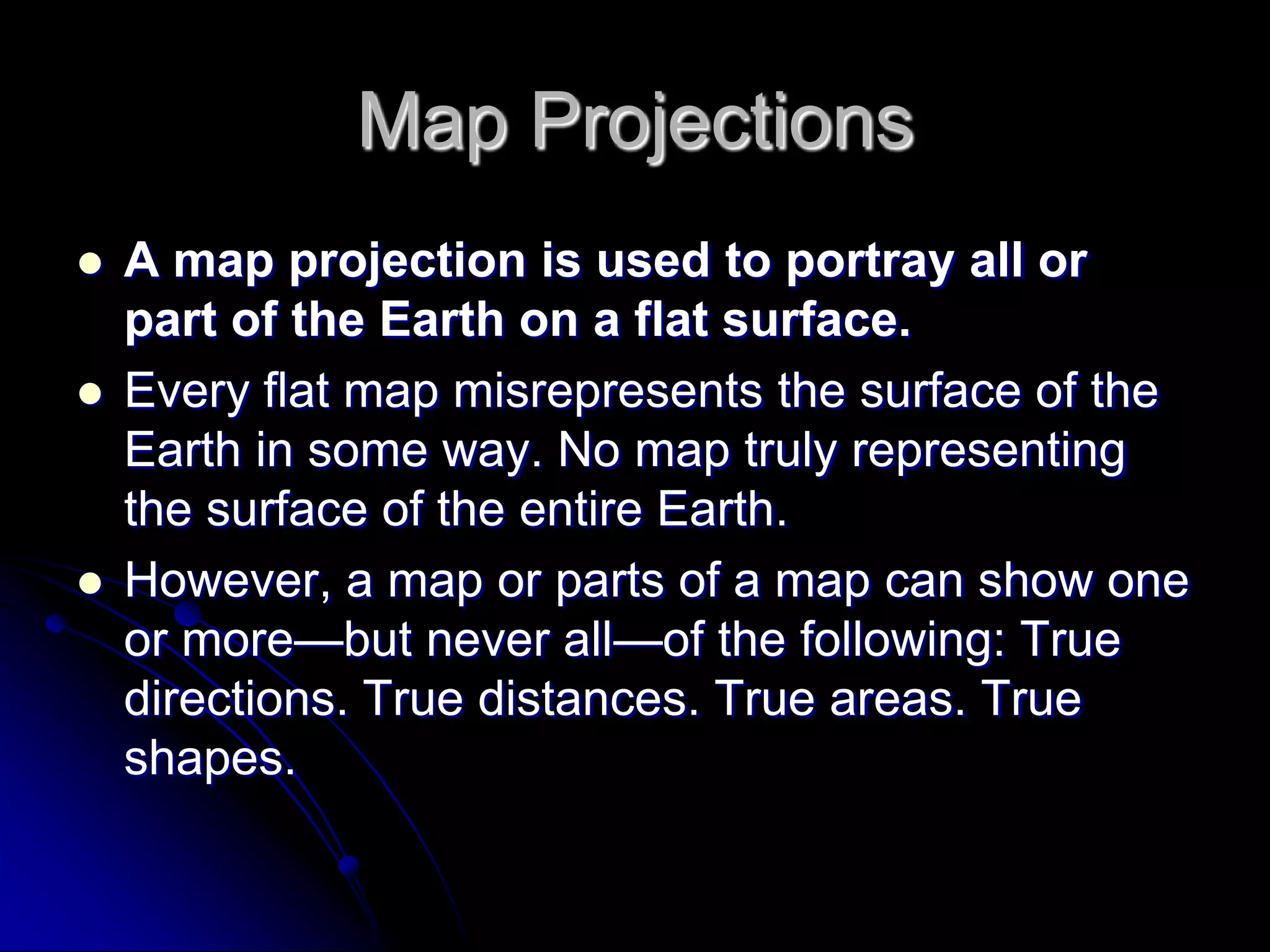
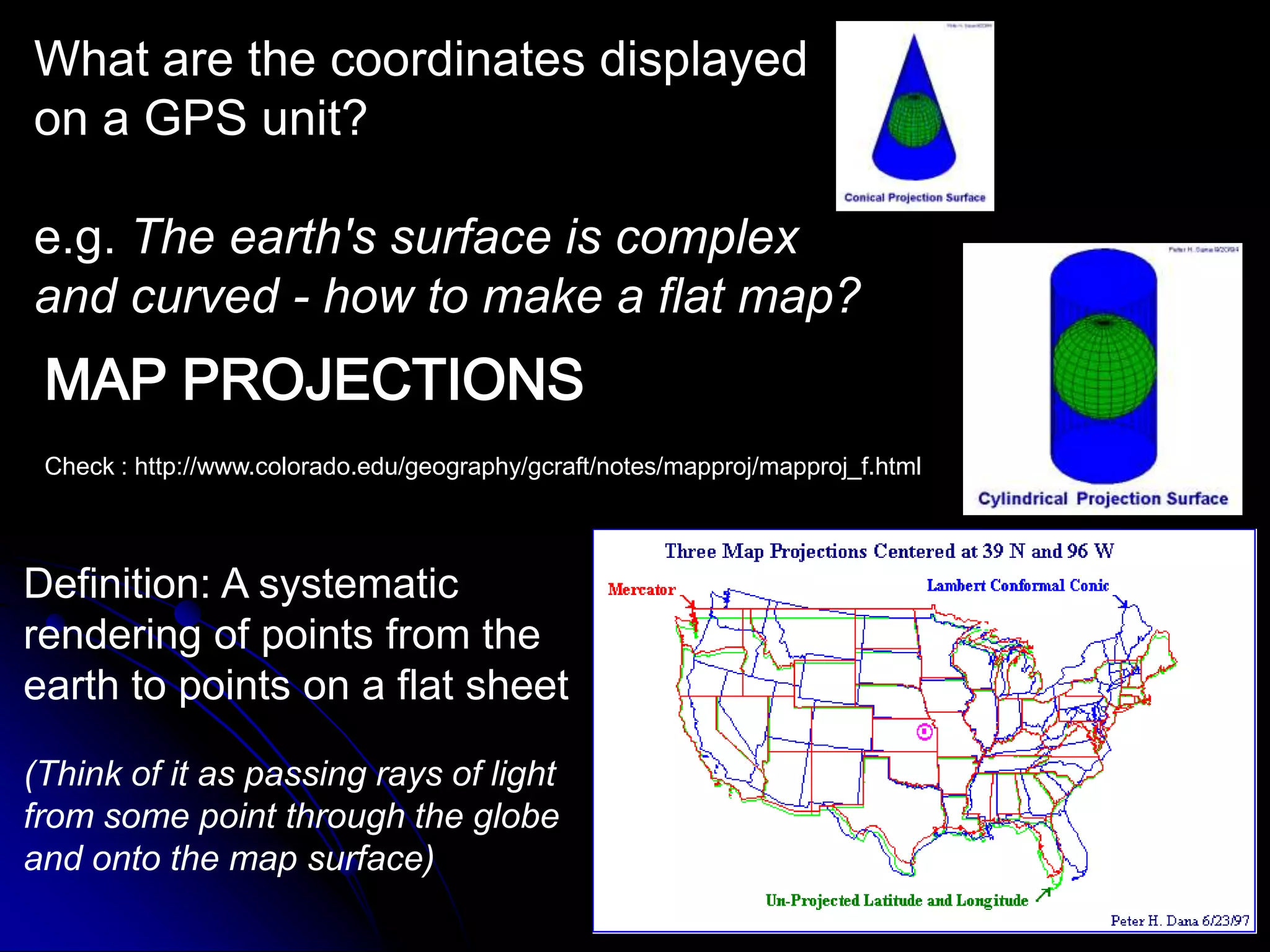
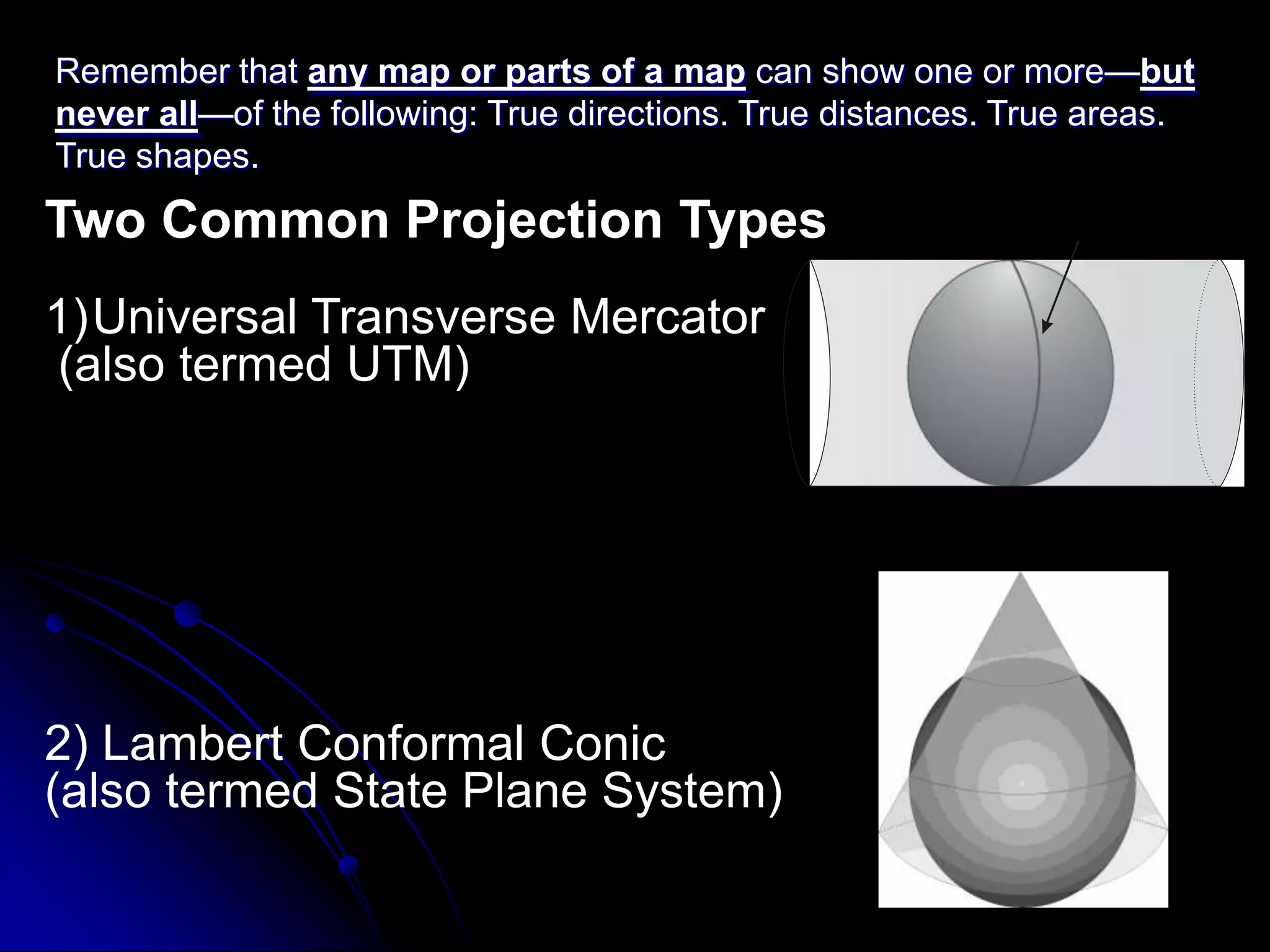
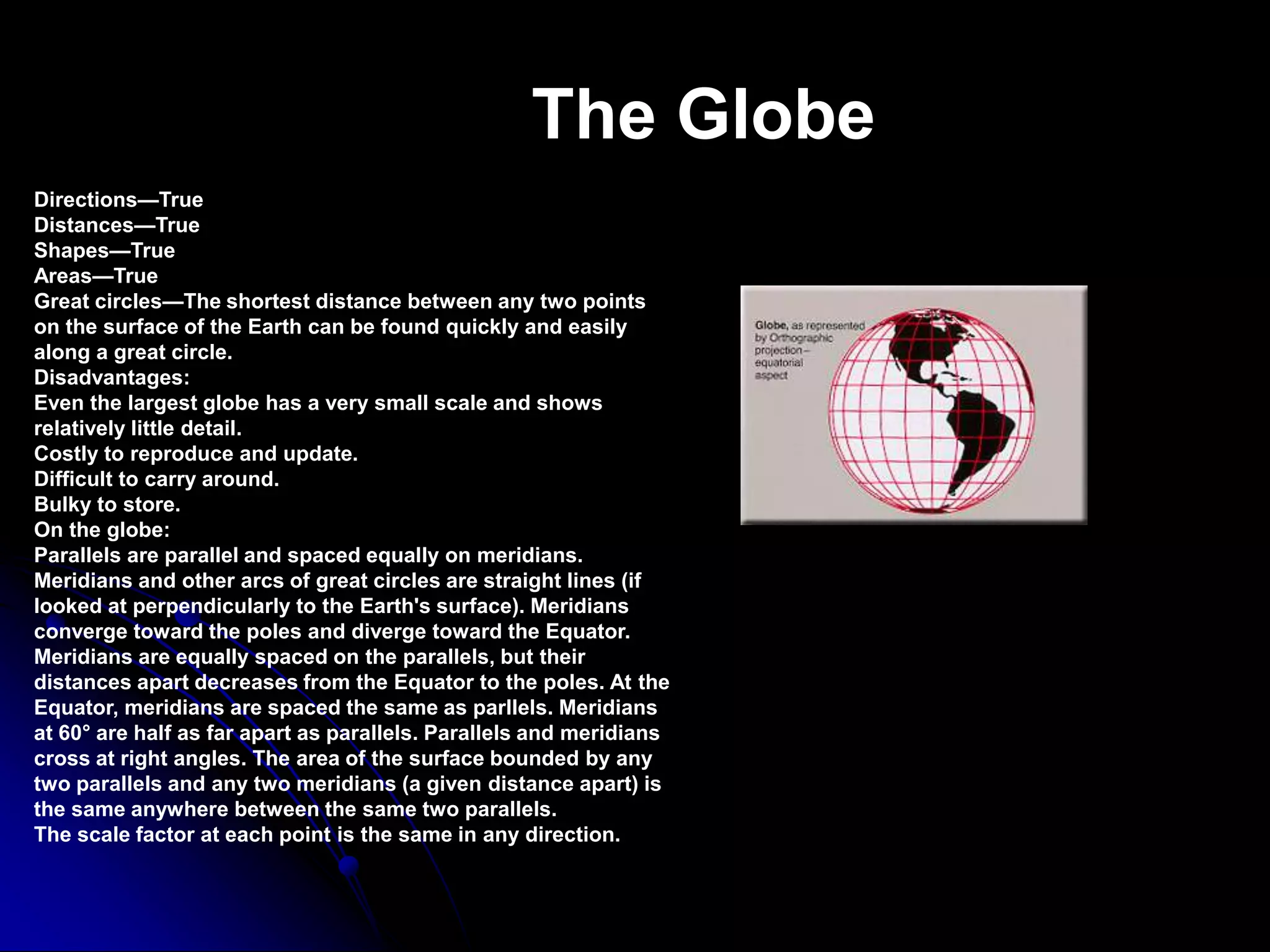
Fundamentals of GPS, geography, datum, and innovative technologies in surveying and positioning.
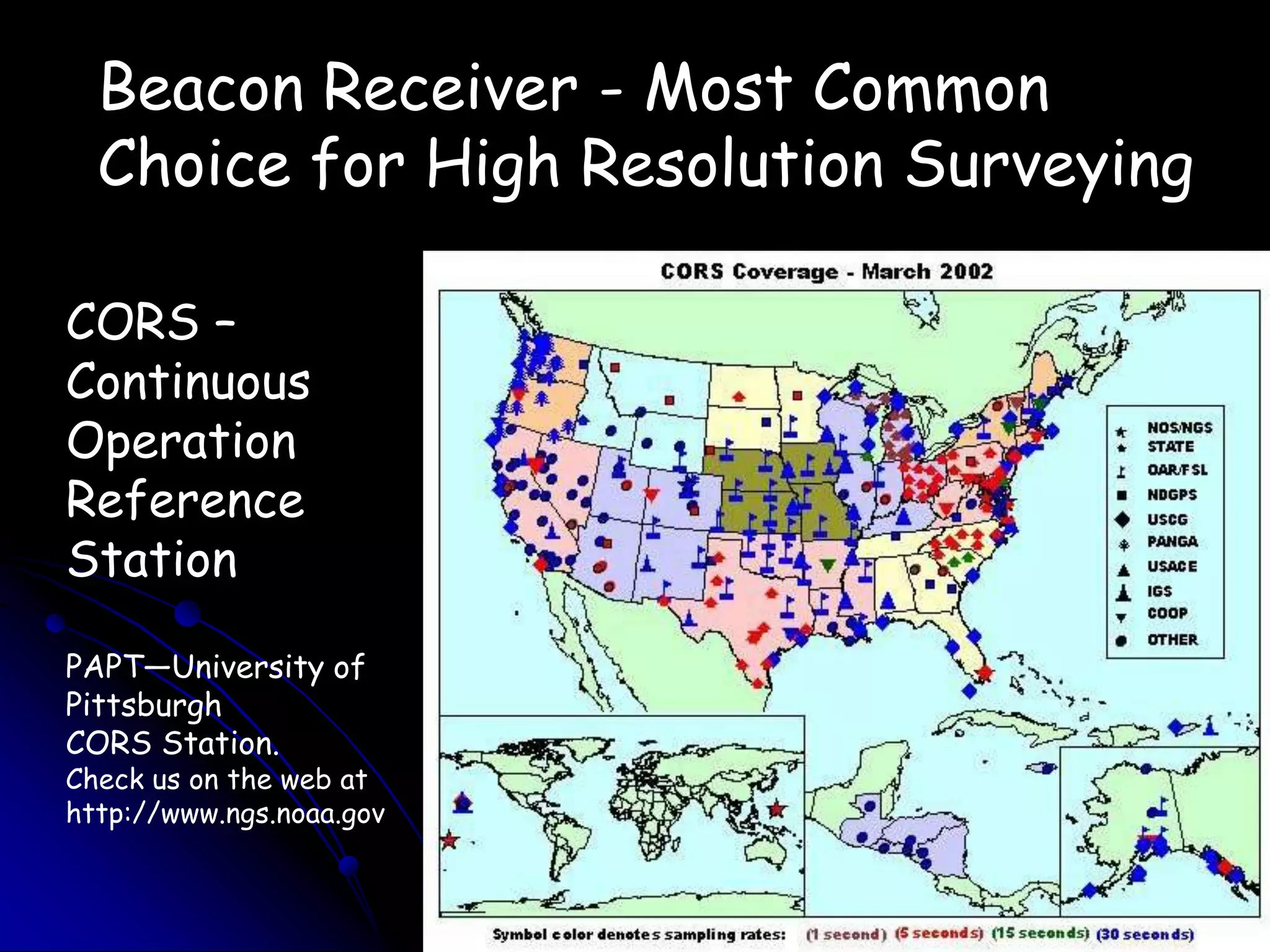
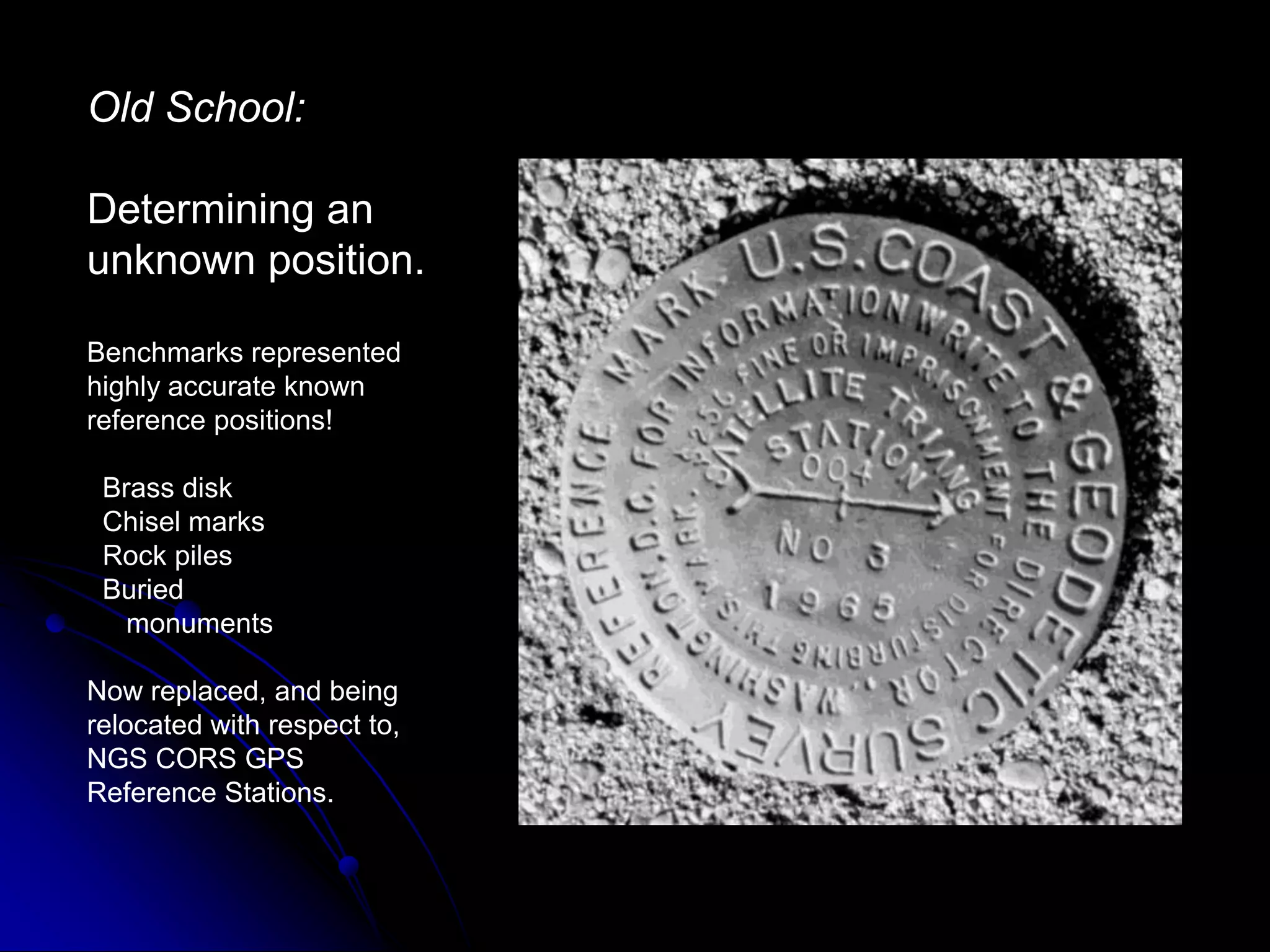
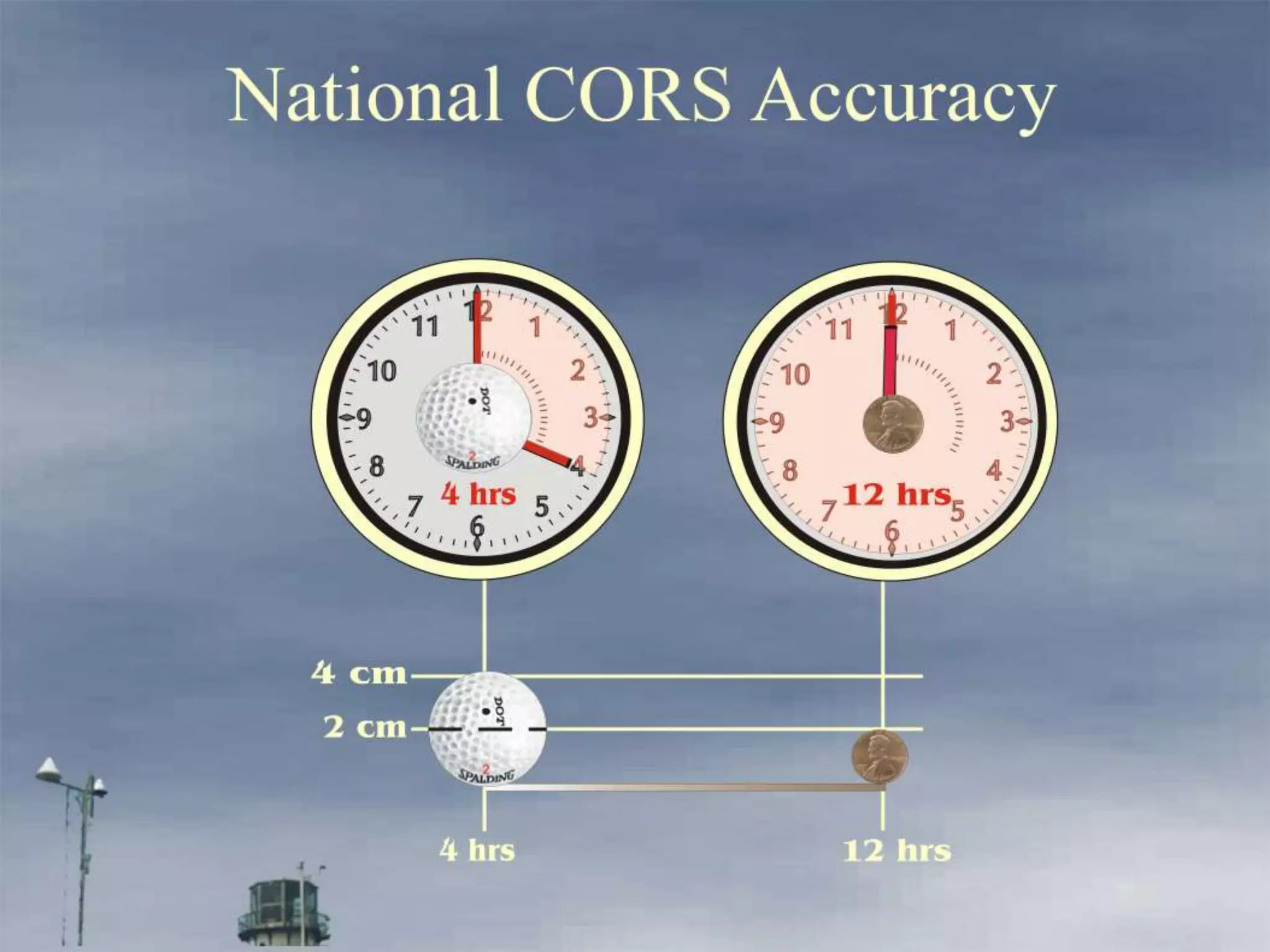
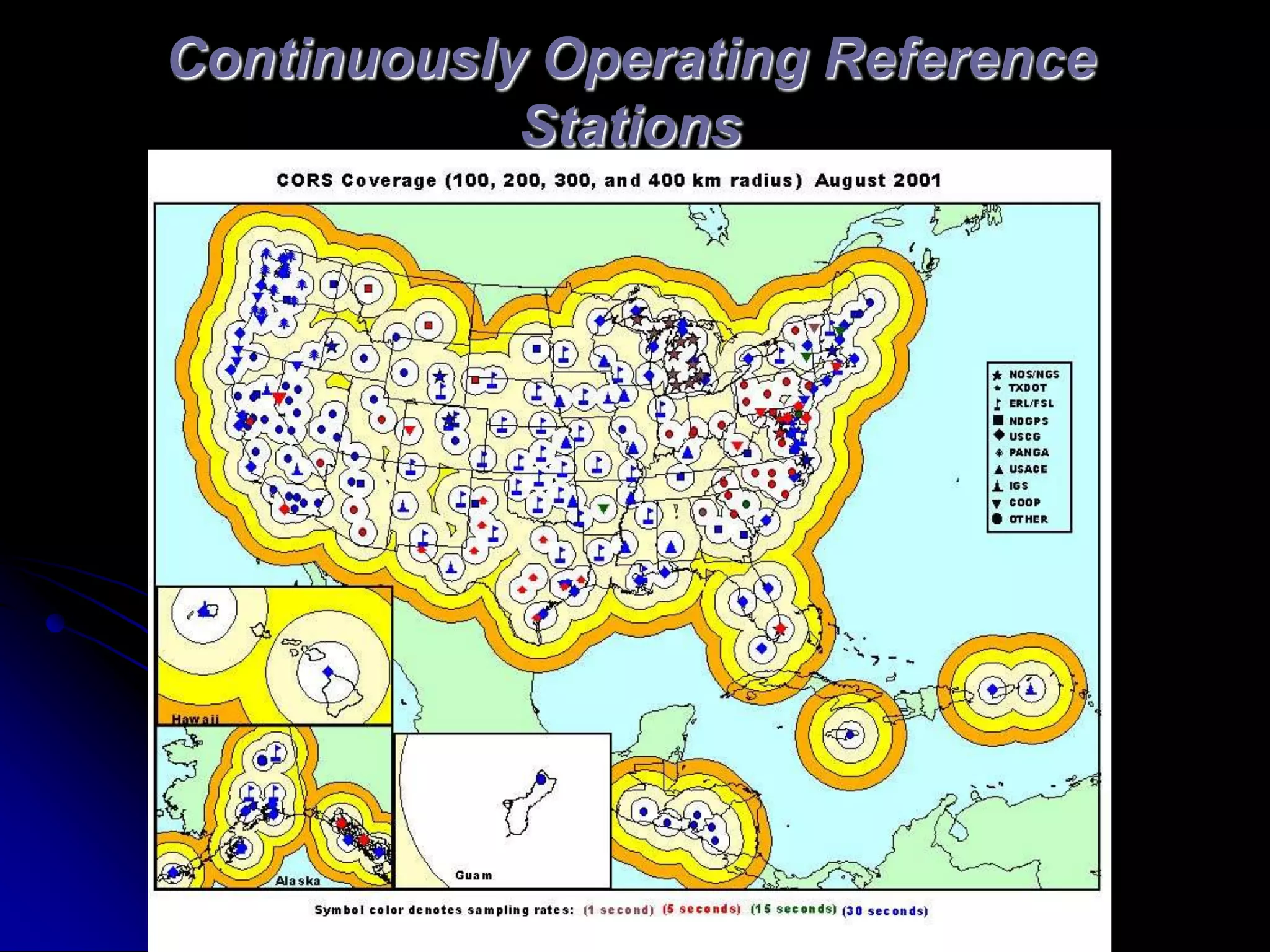
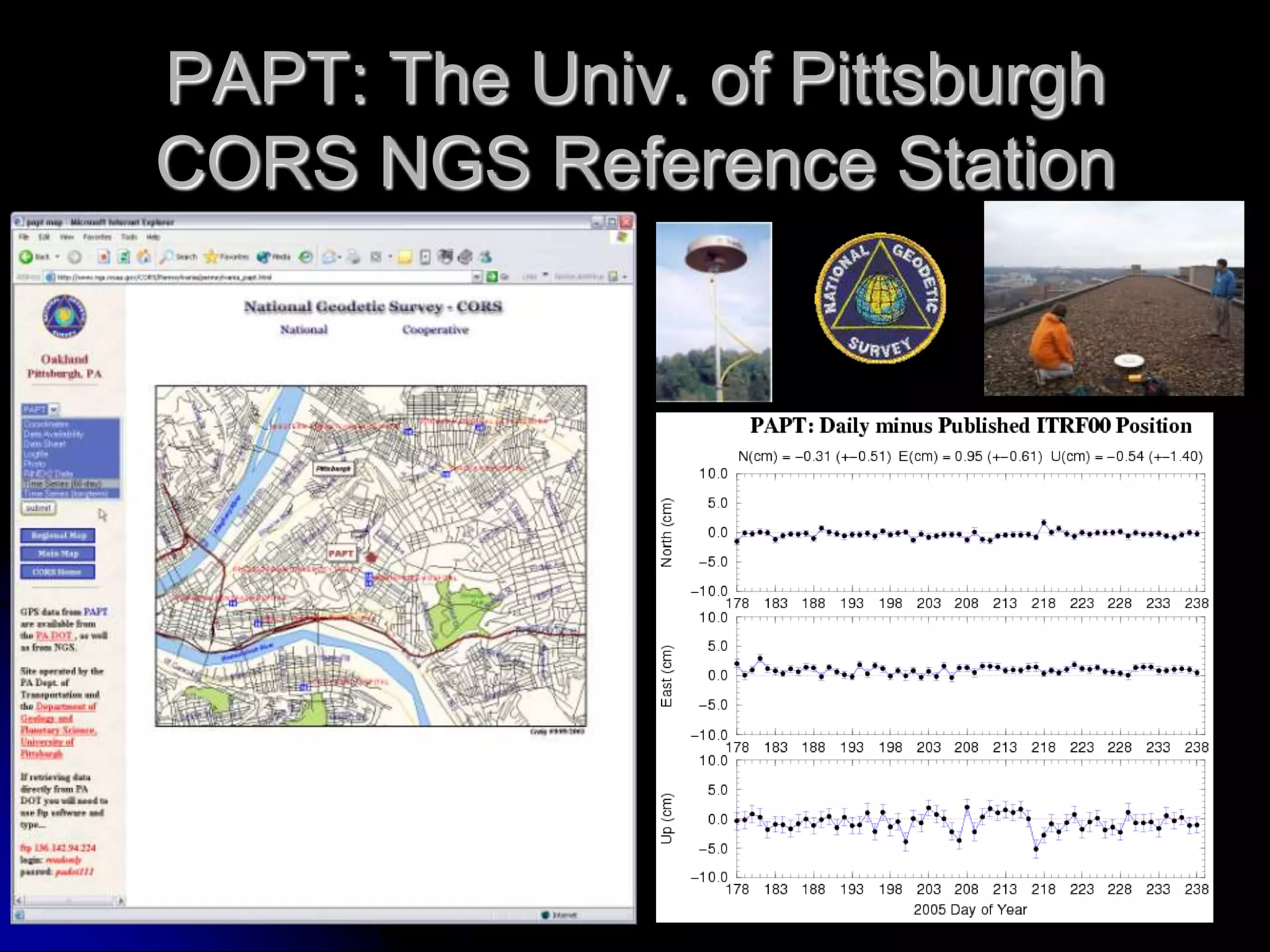
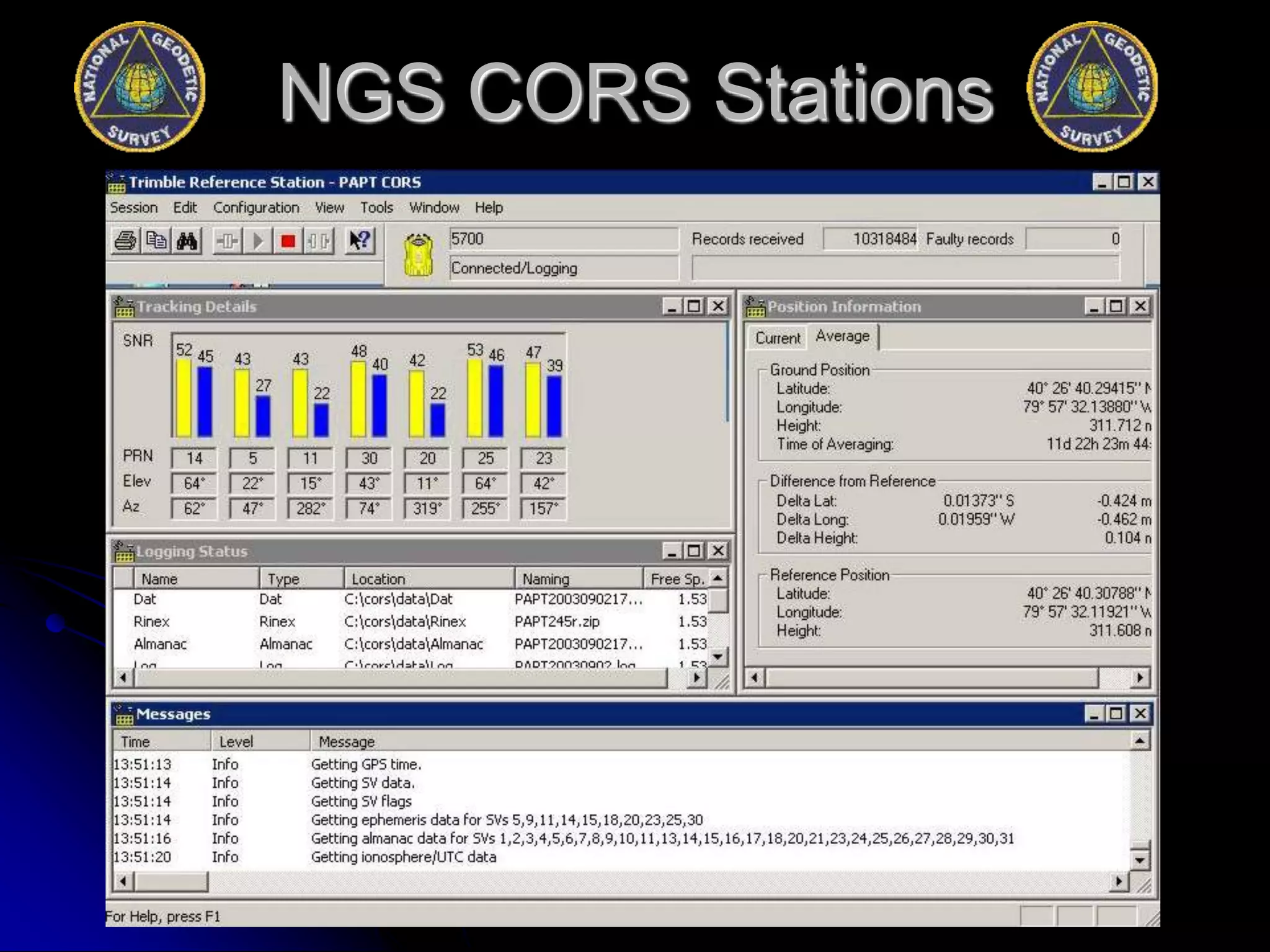
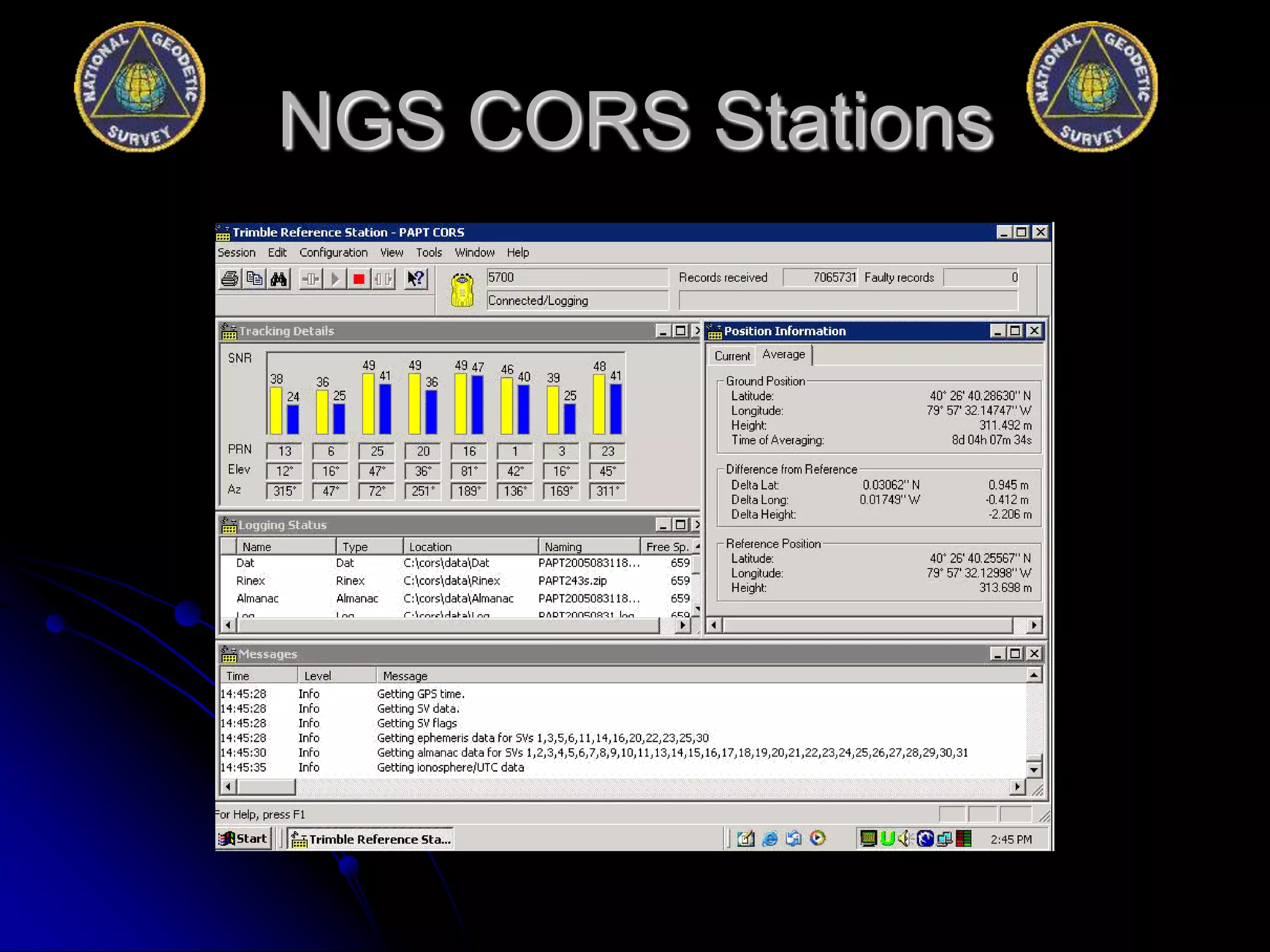
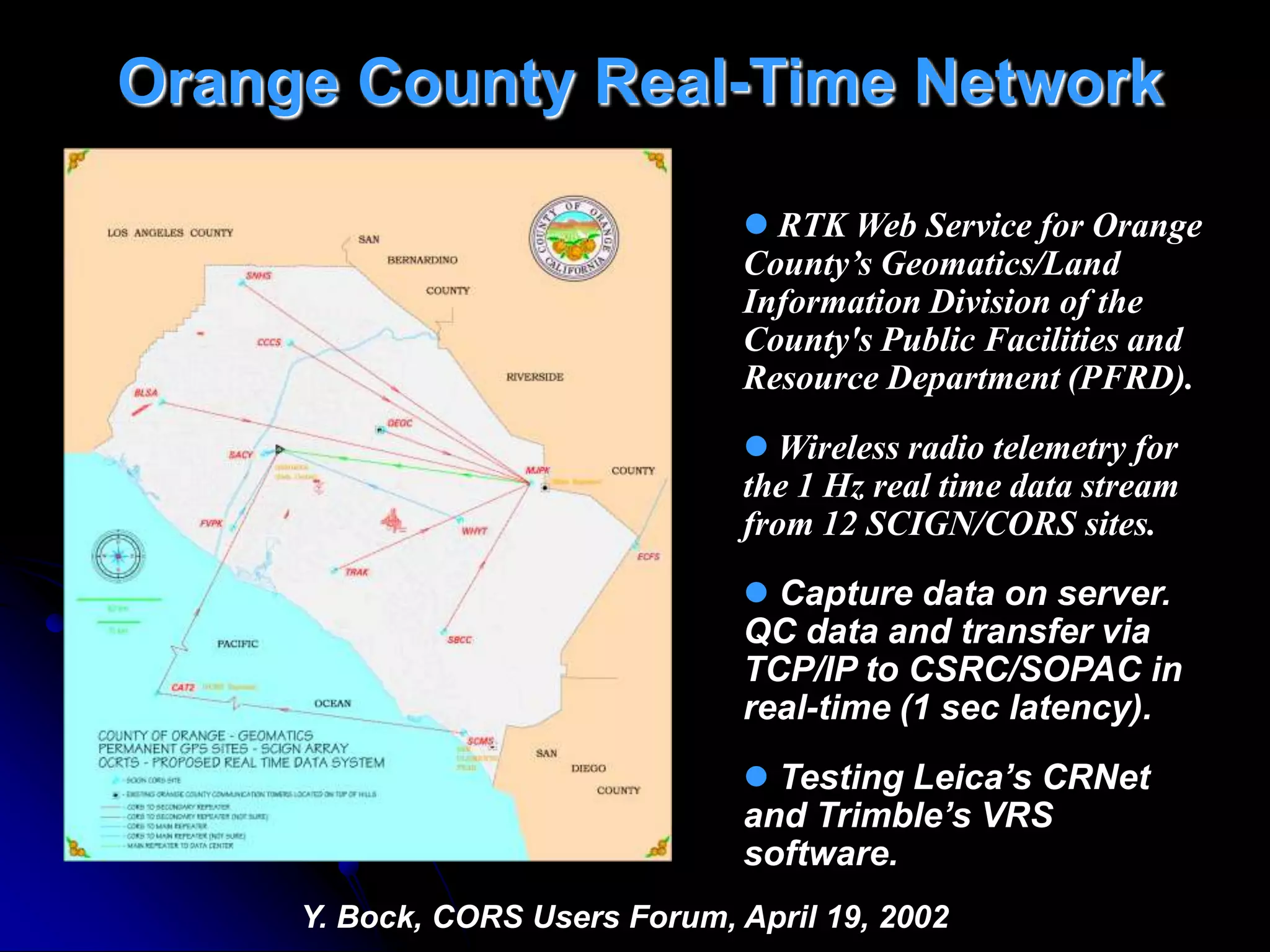
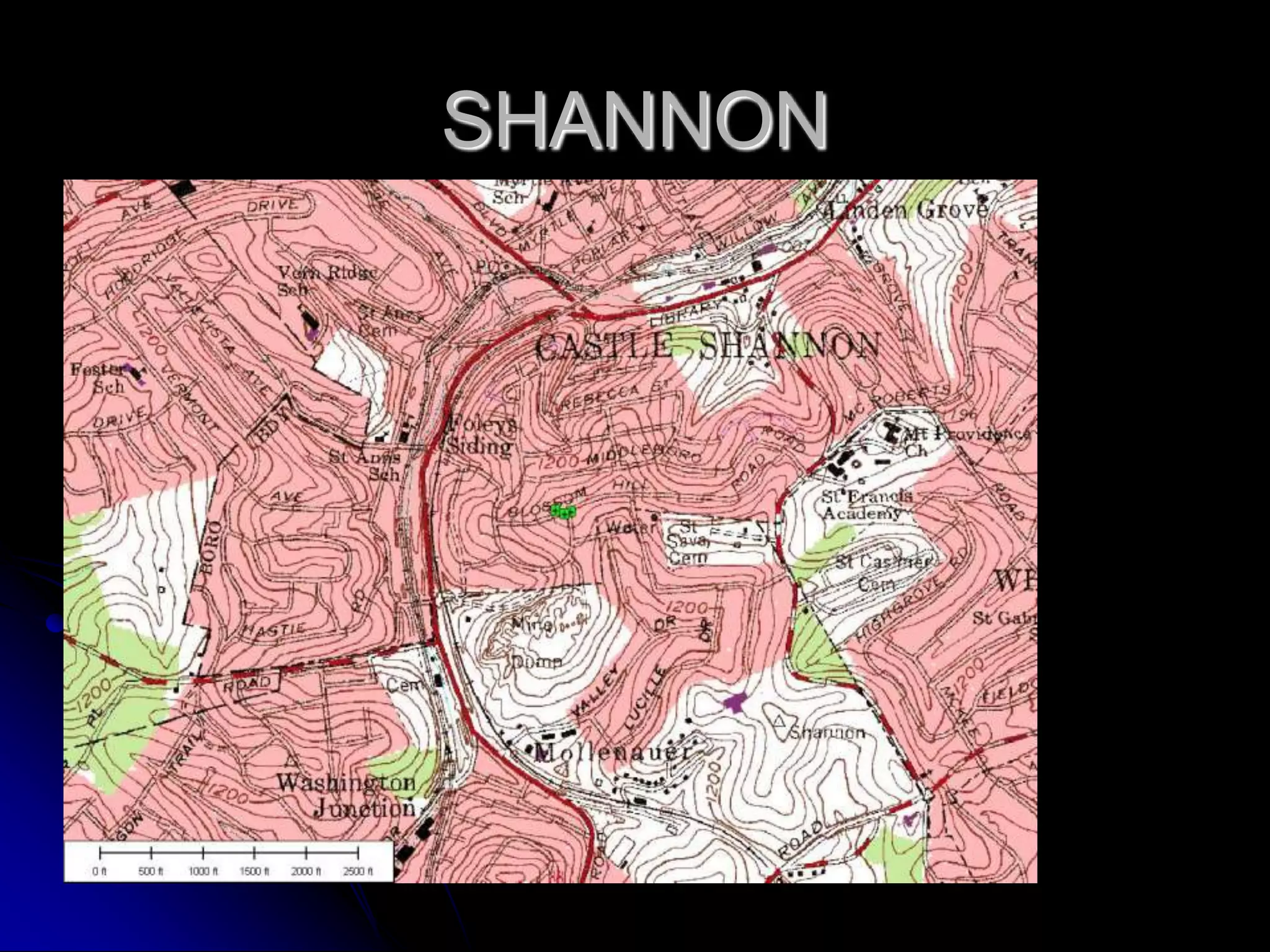
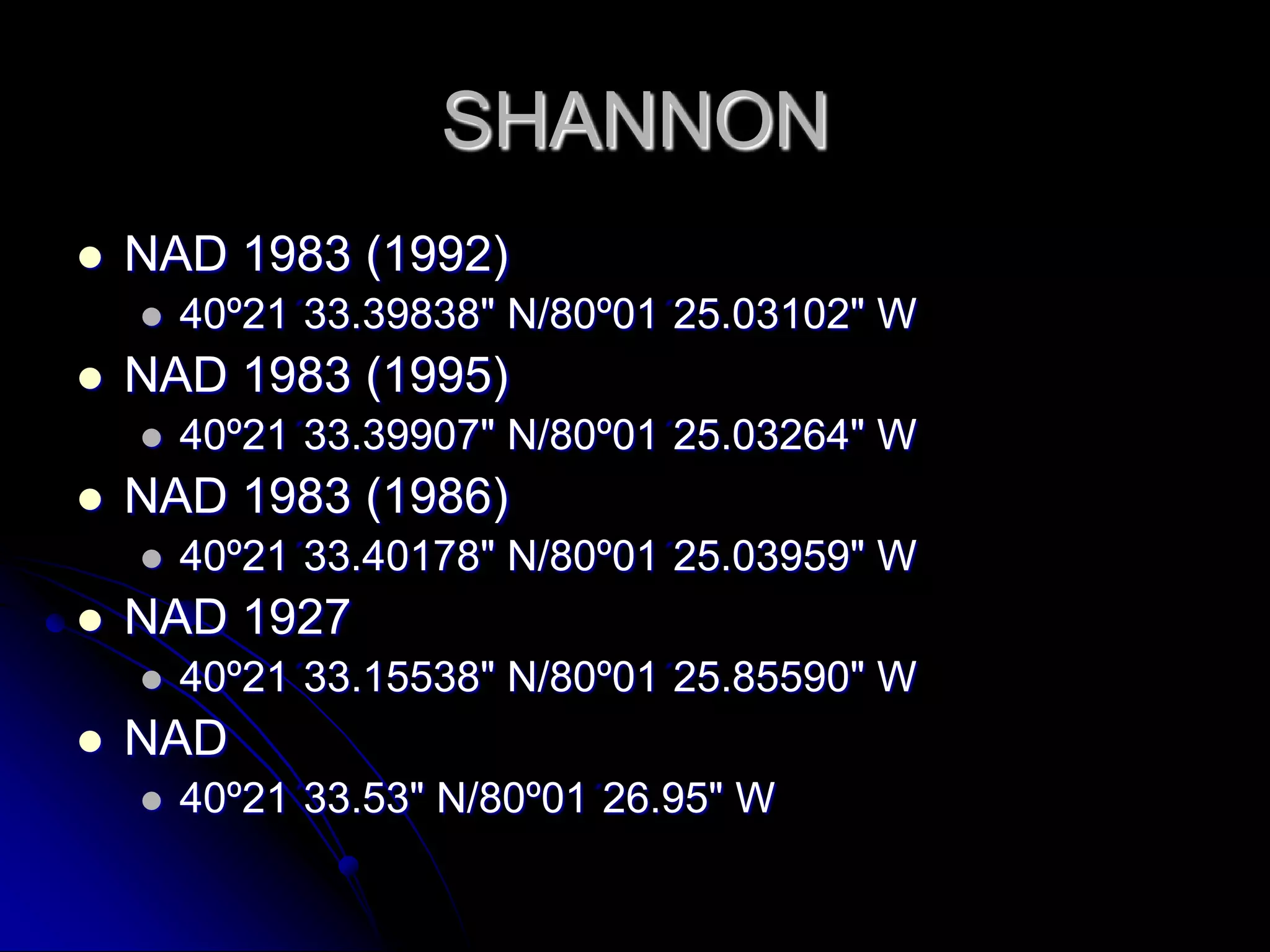
Details on CORS, including their significance in high-resolution surveying and as benchmarks for accuracy.
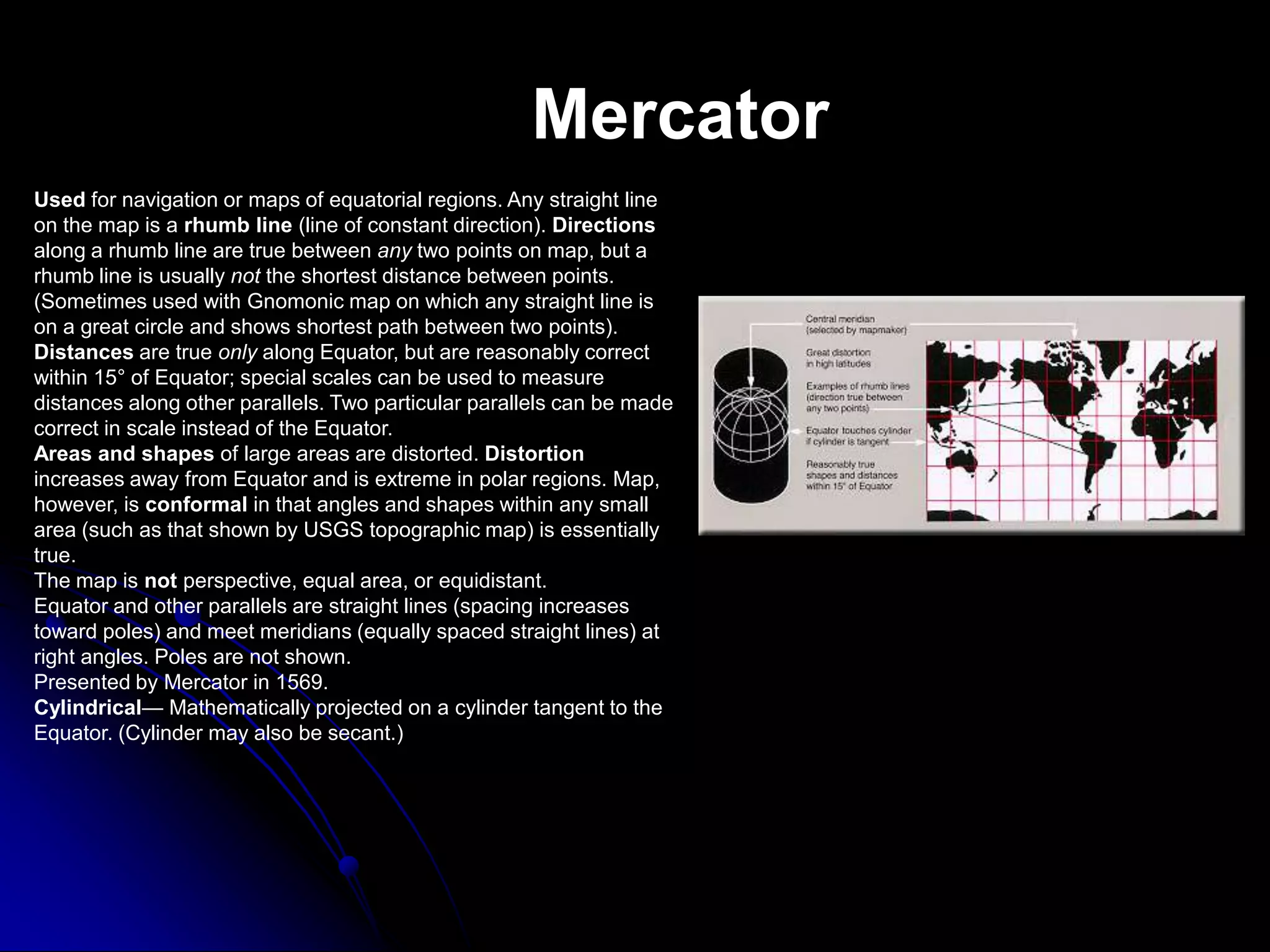
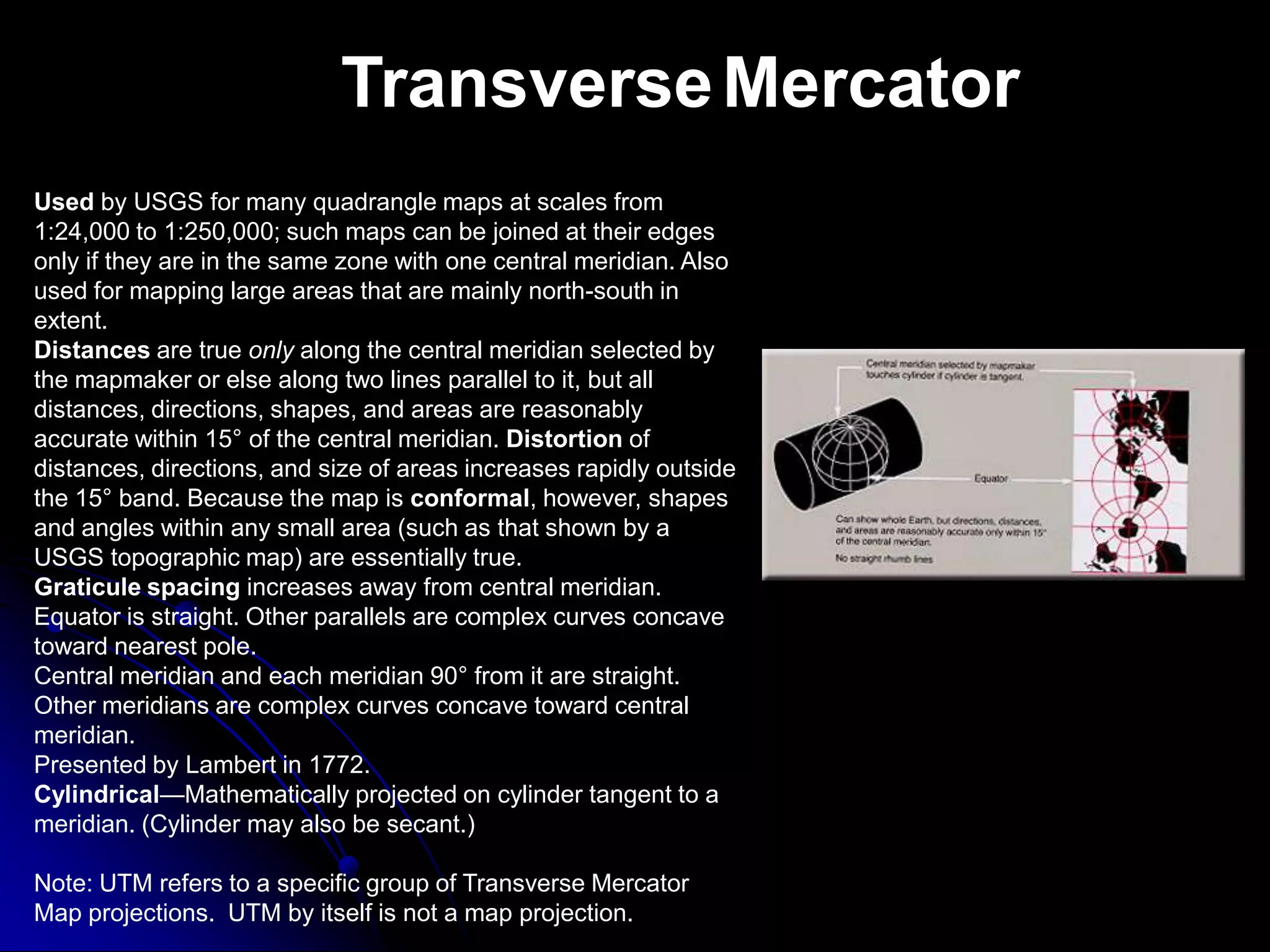
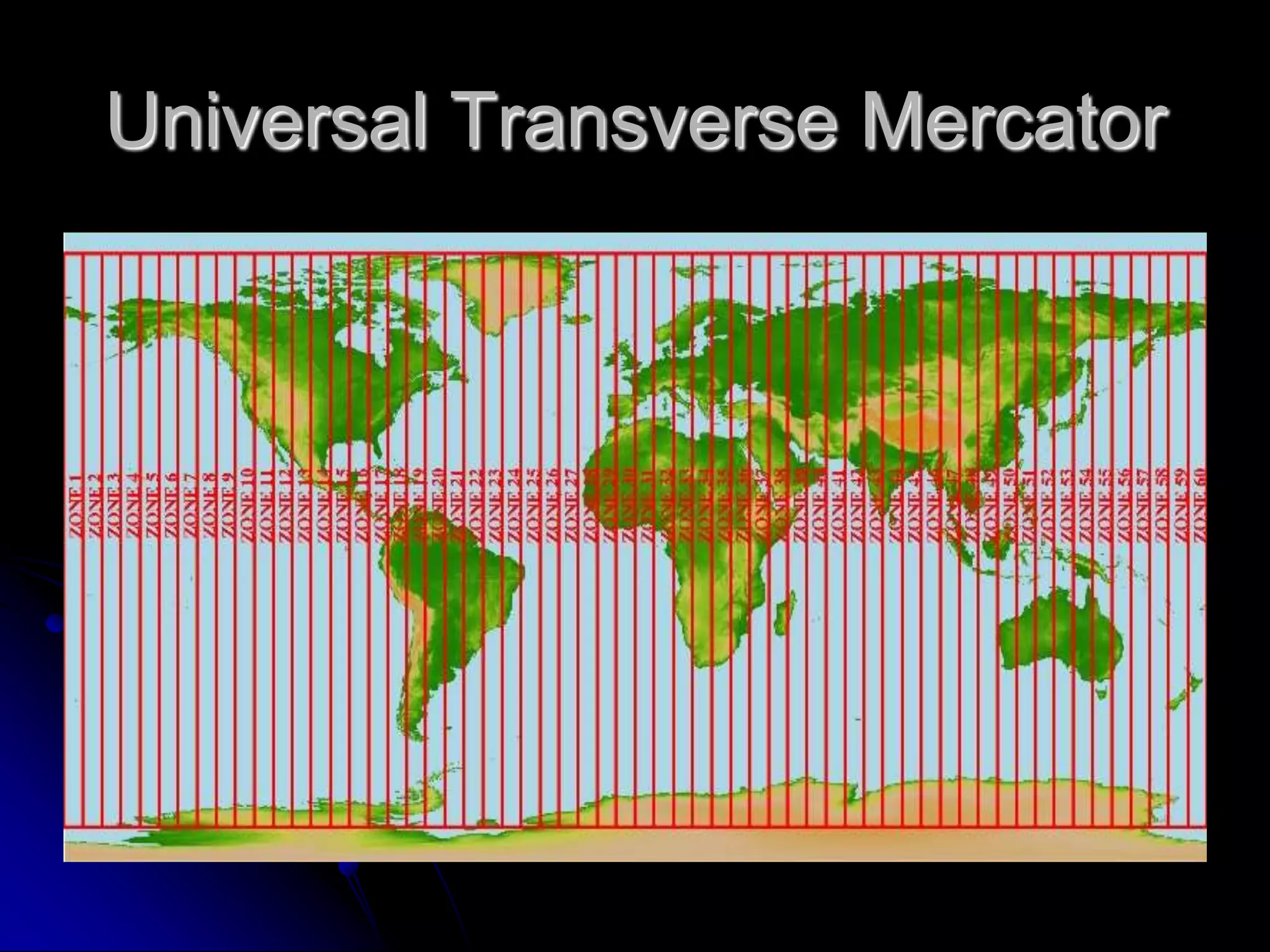
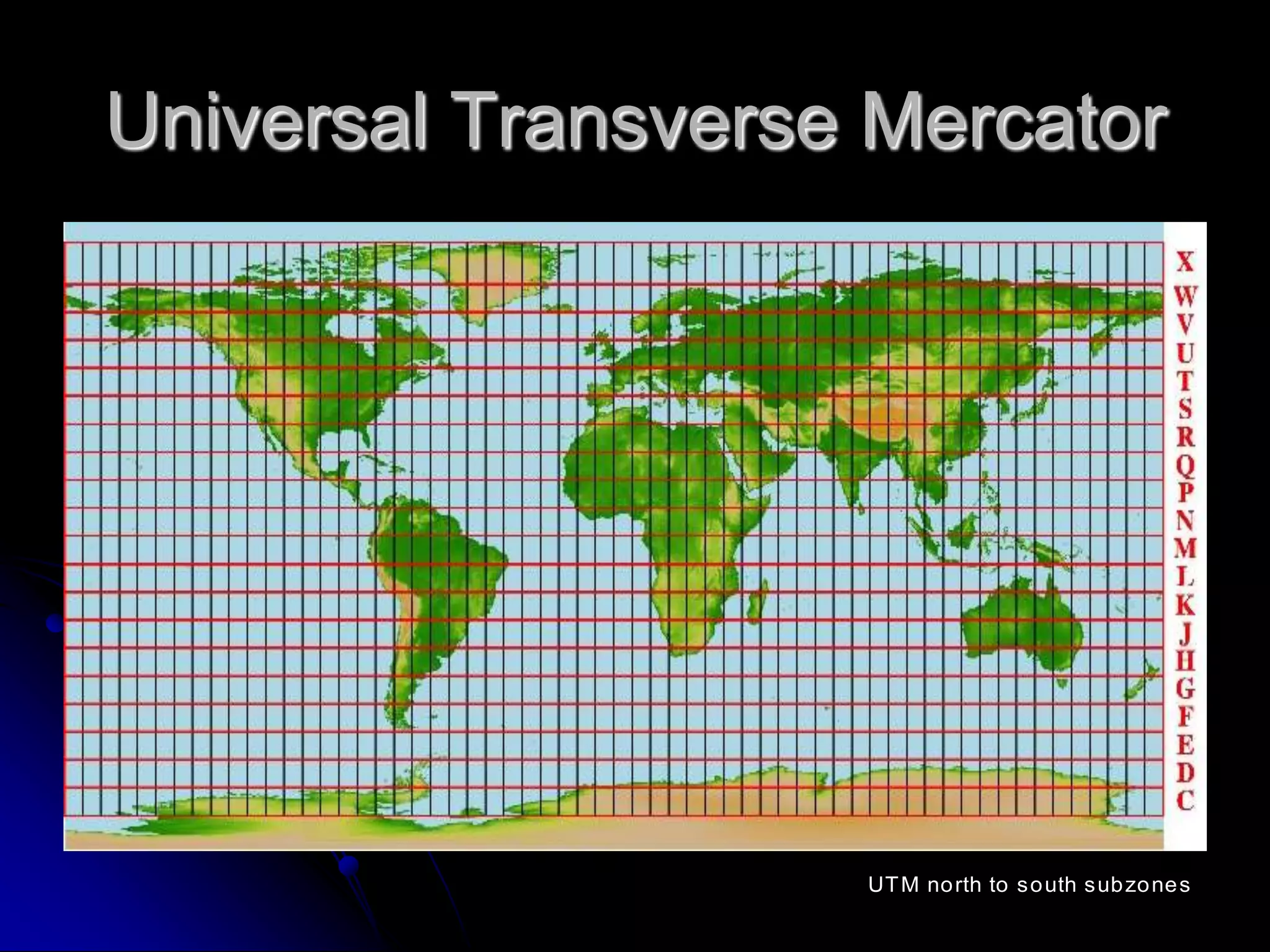
Fundamentals of GPS, geography, datum, and innovative technologies in surveying and positioning.
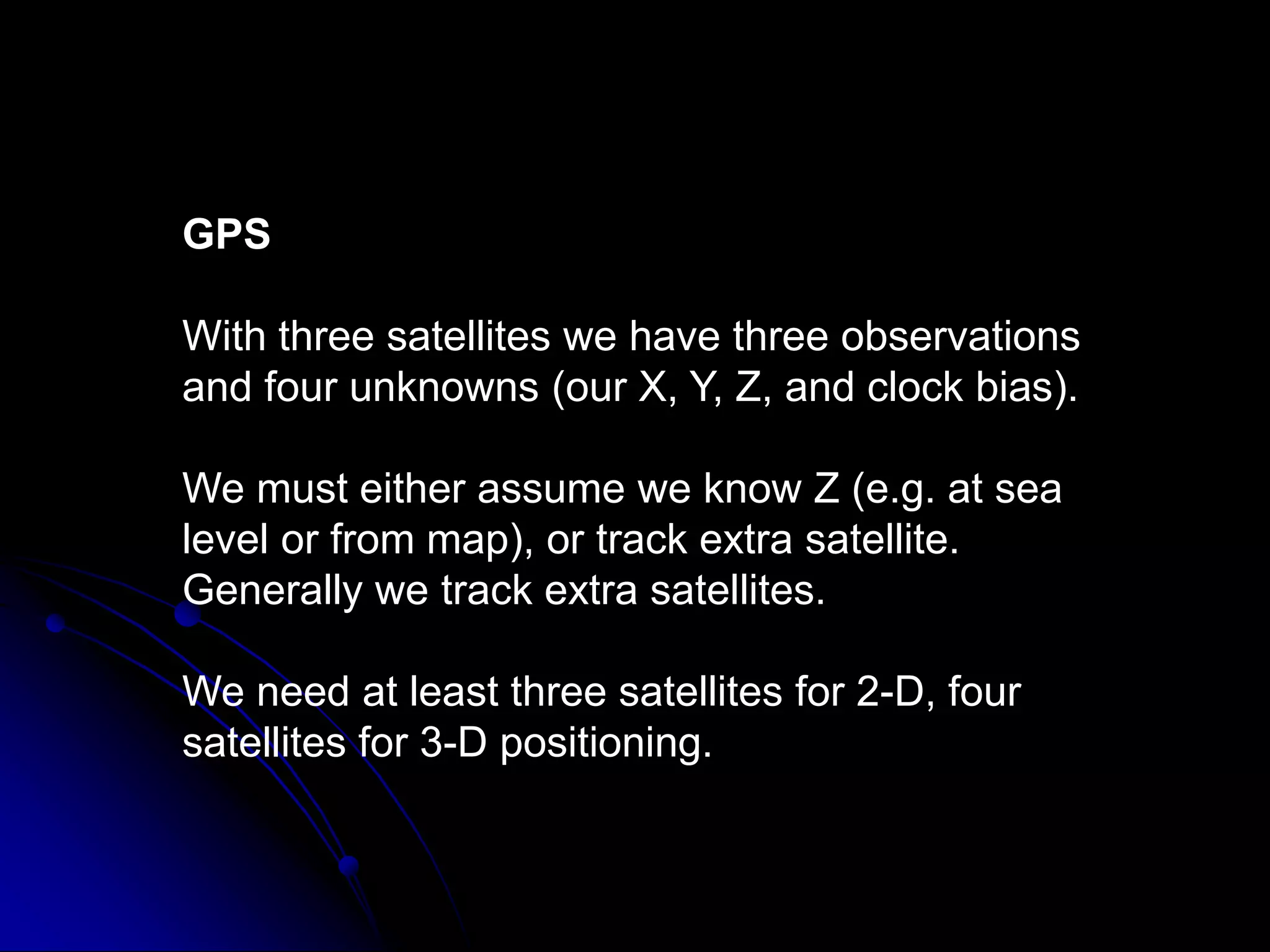
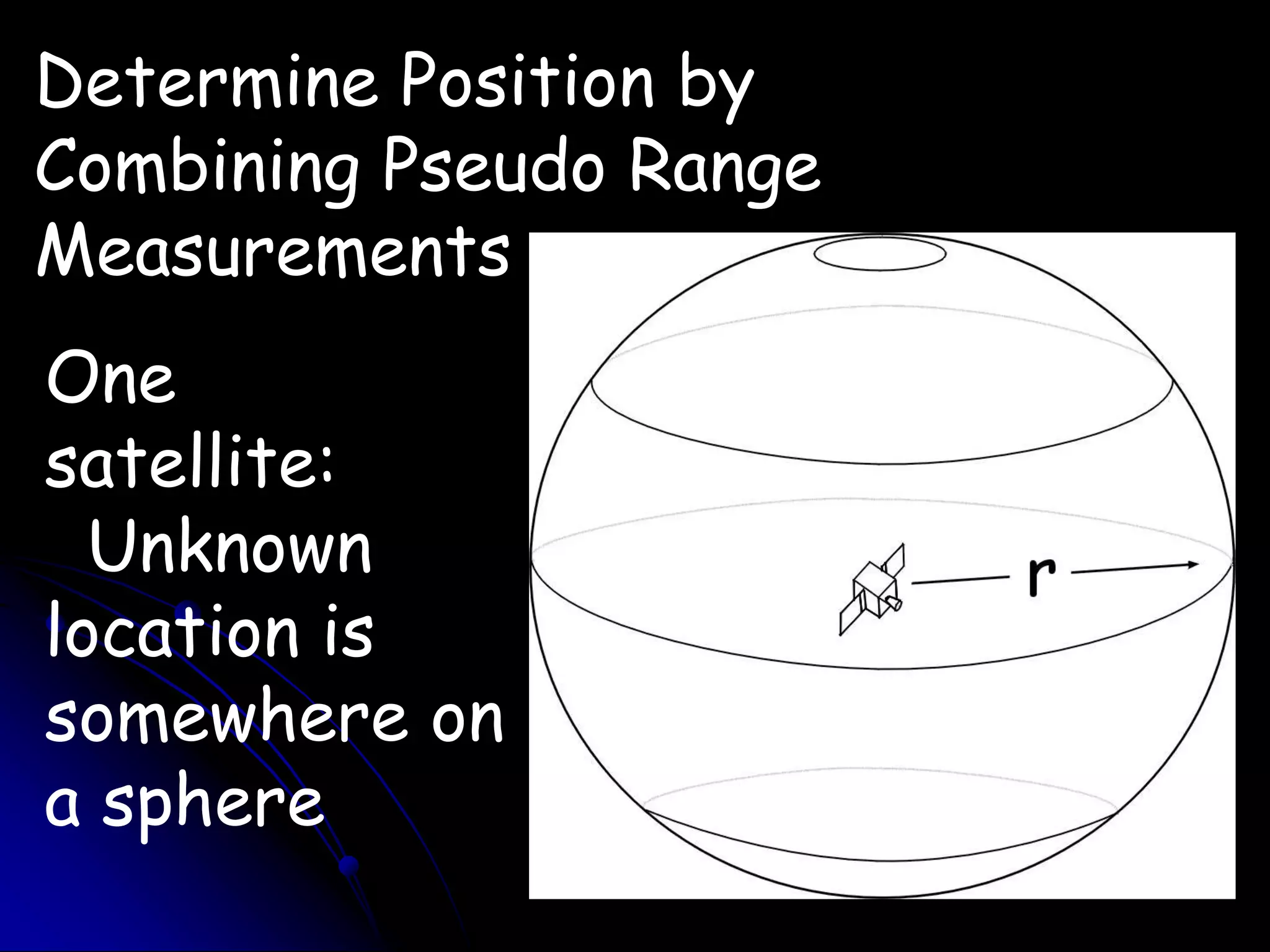
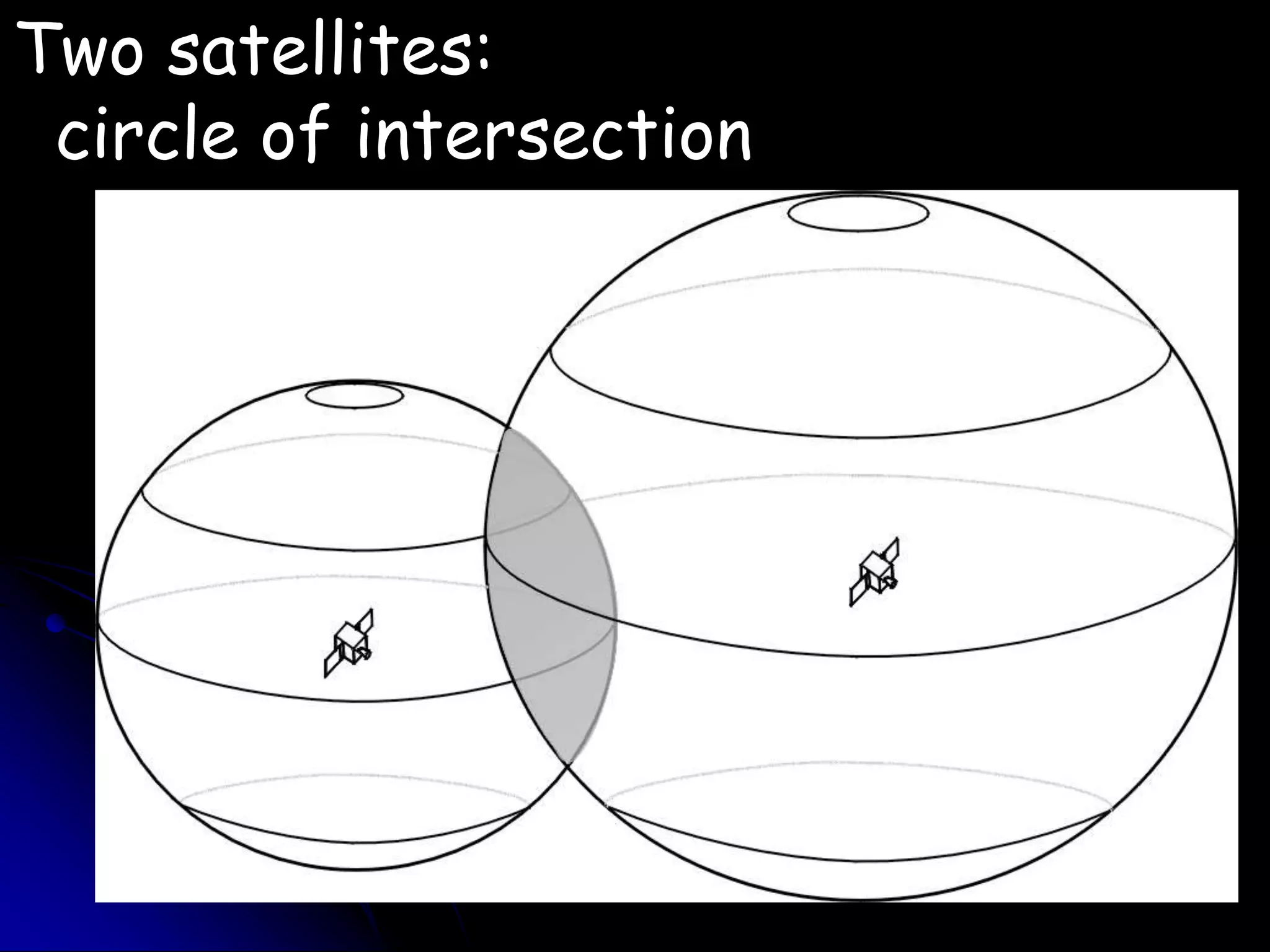
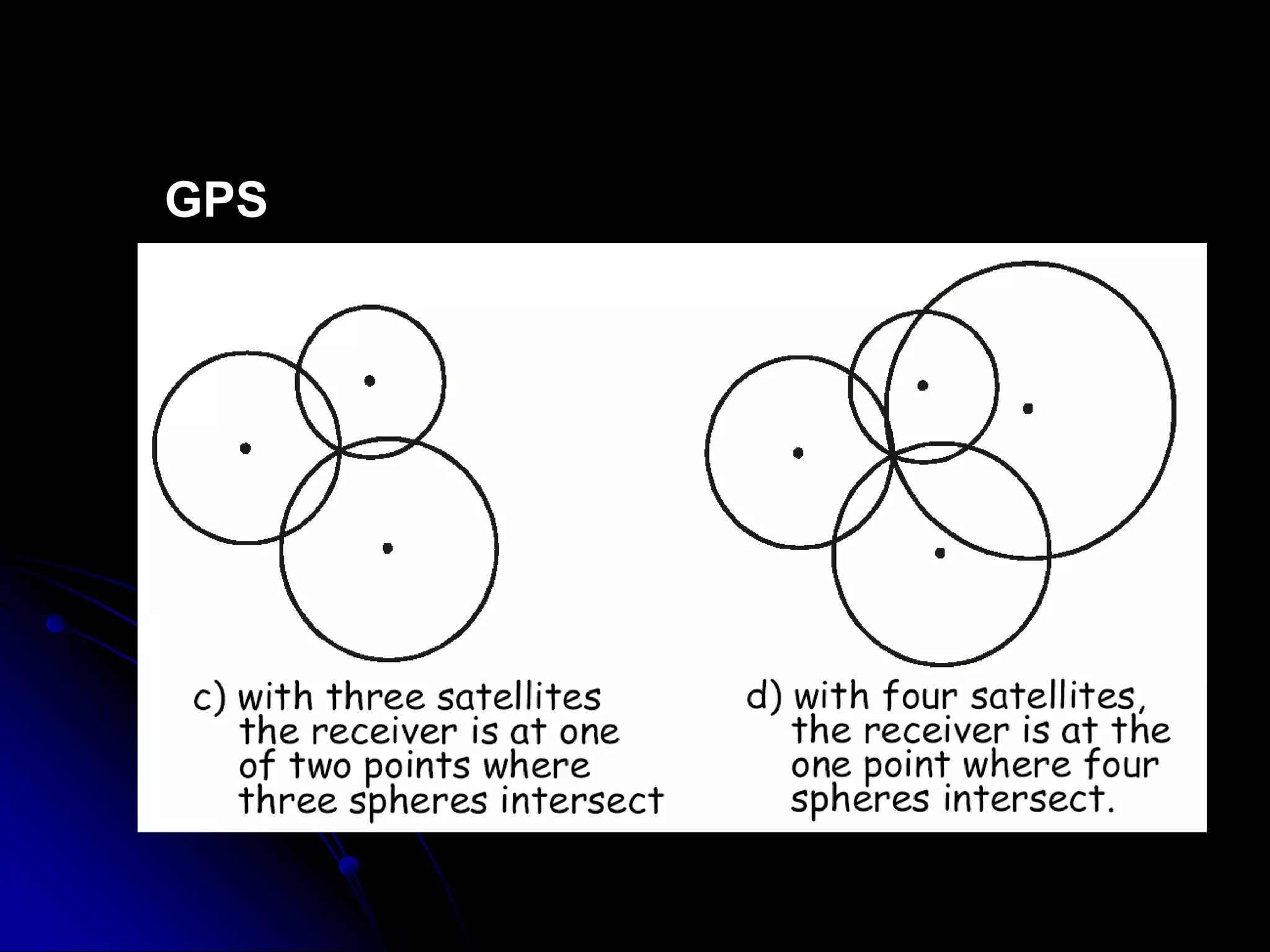
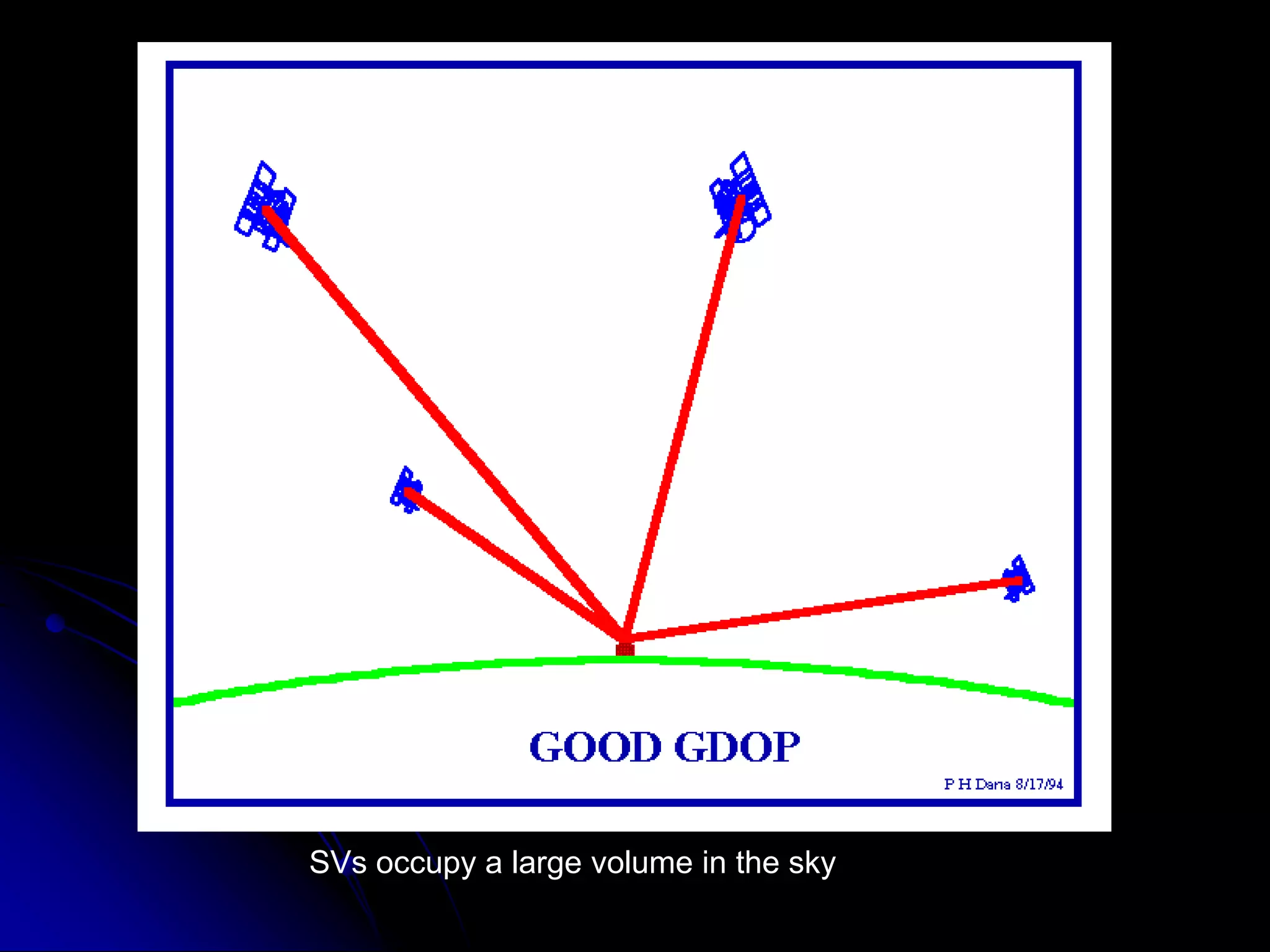
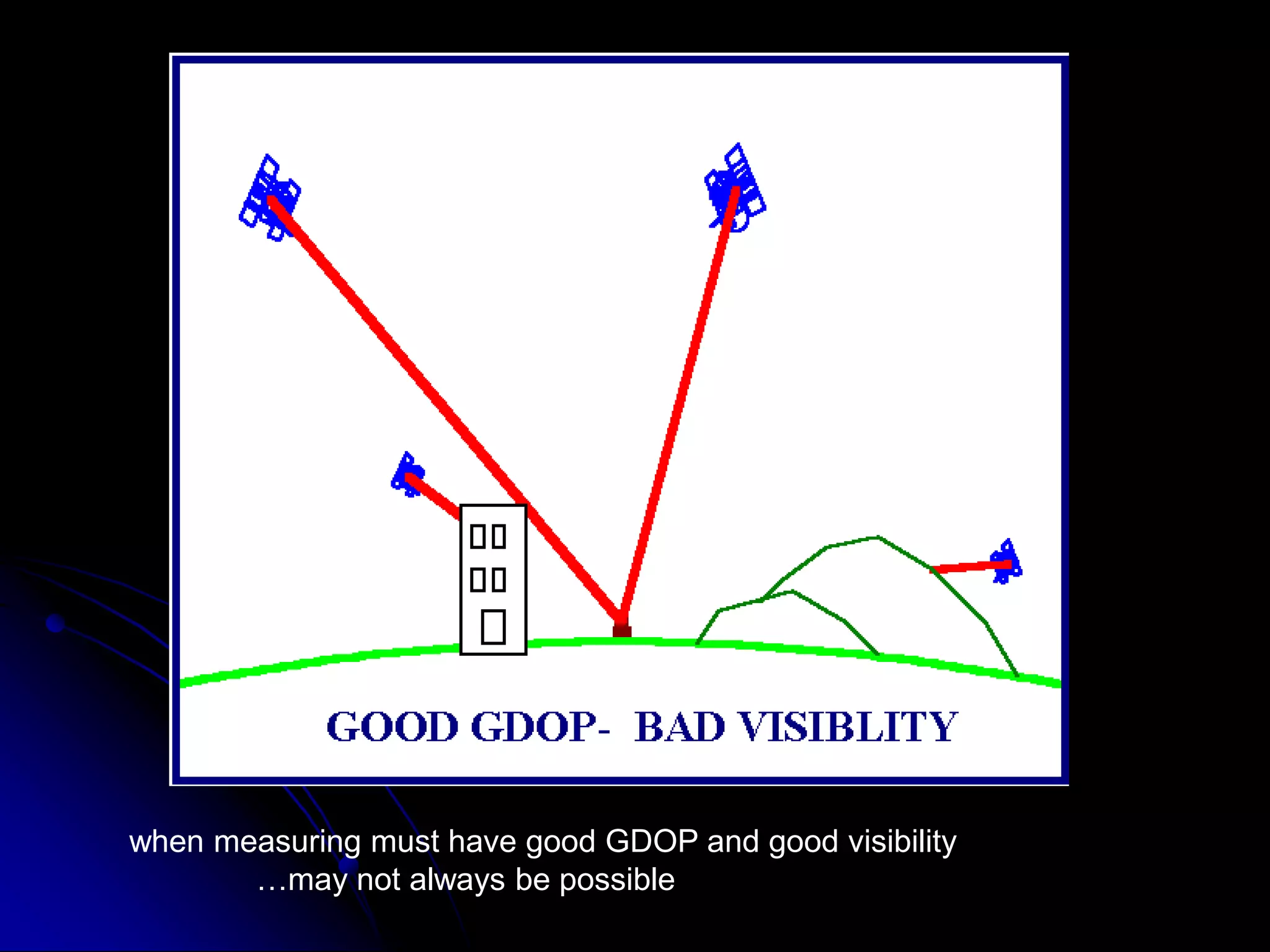
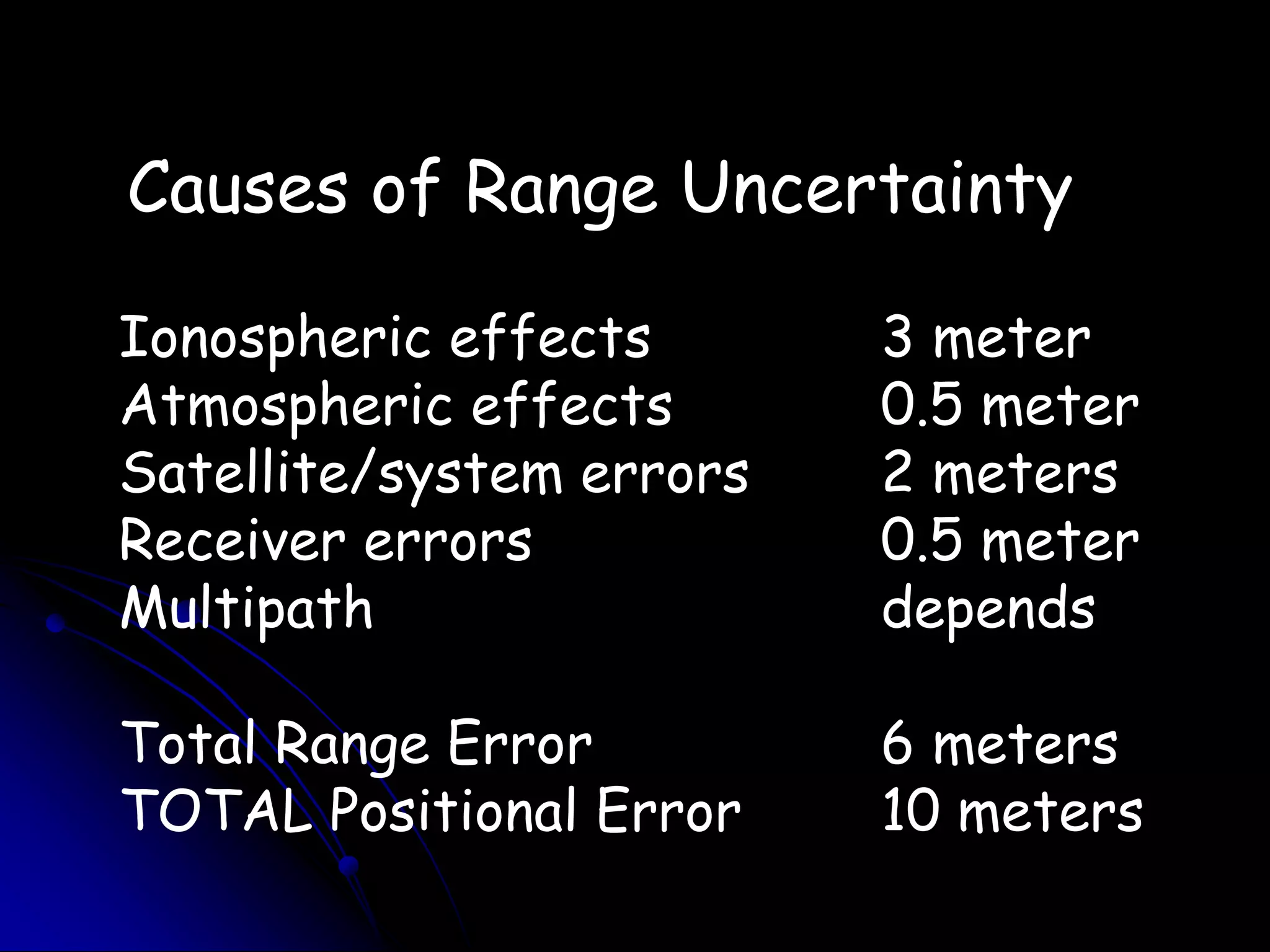
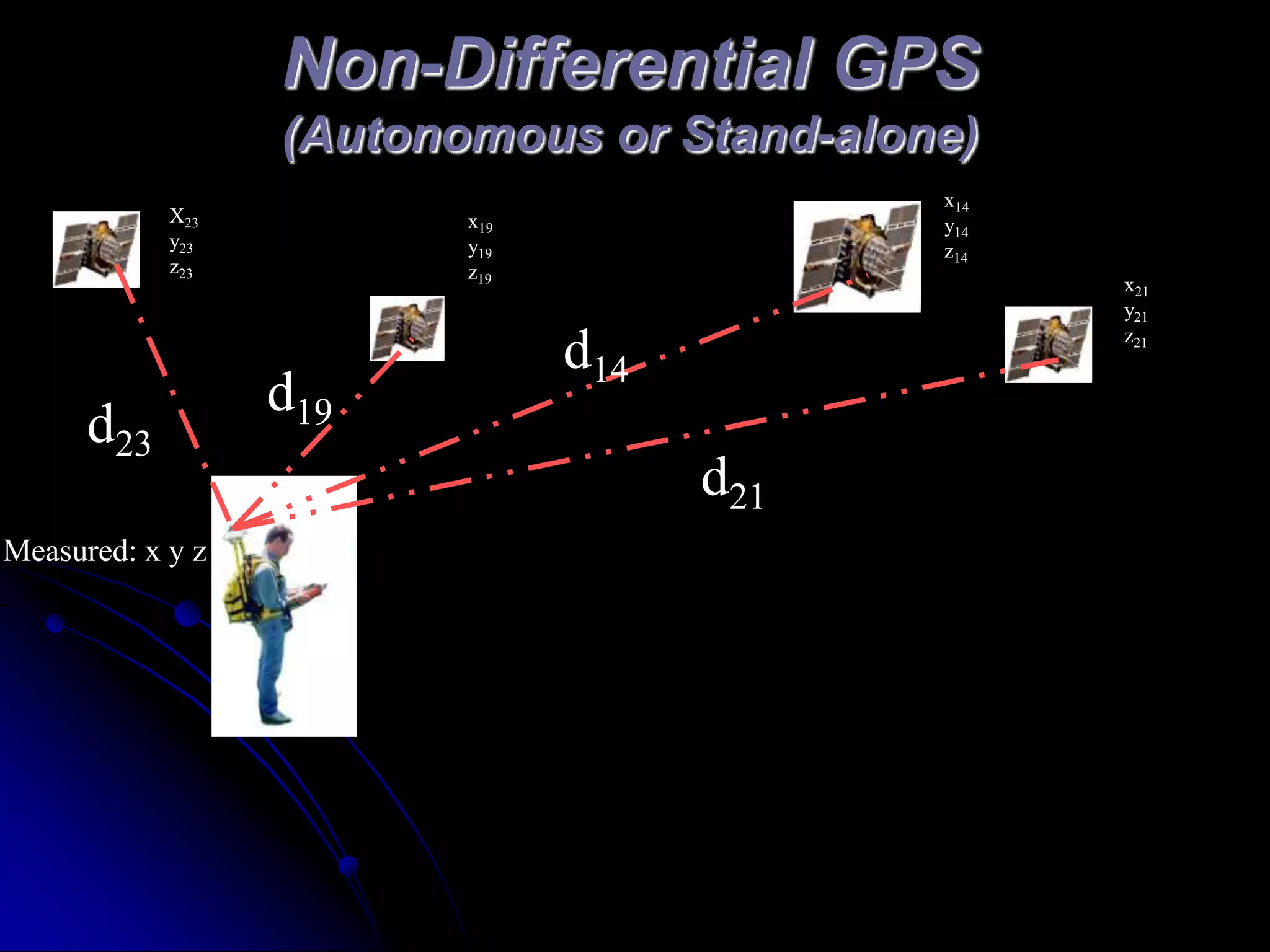
Fundamentals of GPS, geography, datum, and innovative technologies in surveying and positioning.Methods of calculating position through satellite data, errors affecting accuracy, and relativistic corrections.
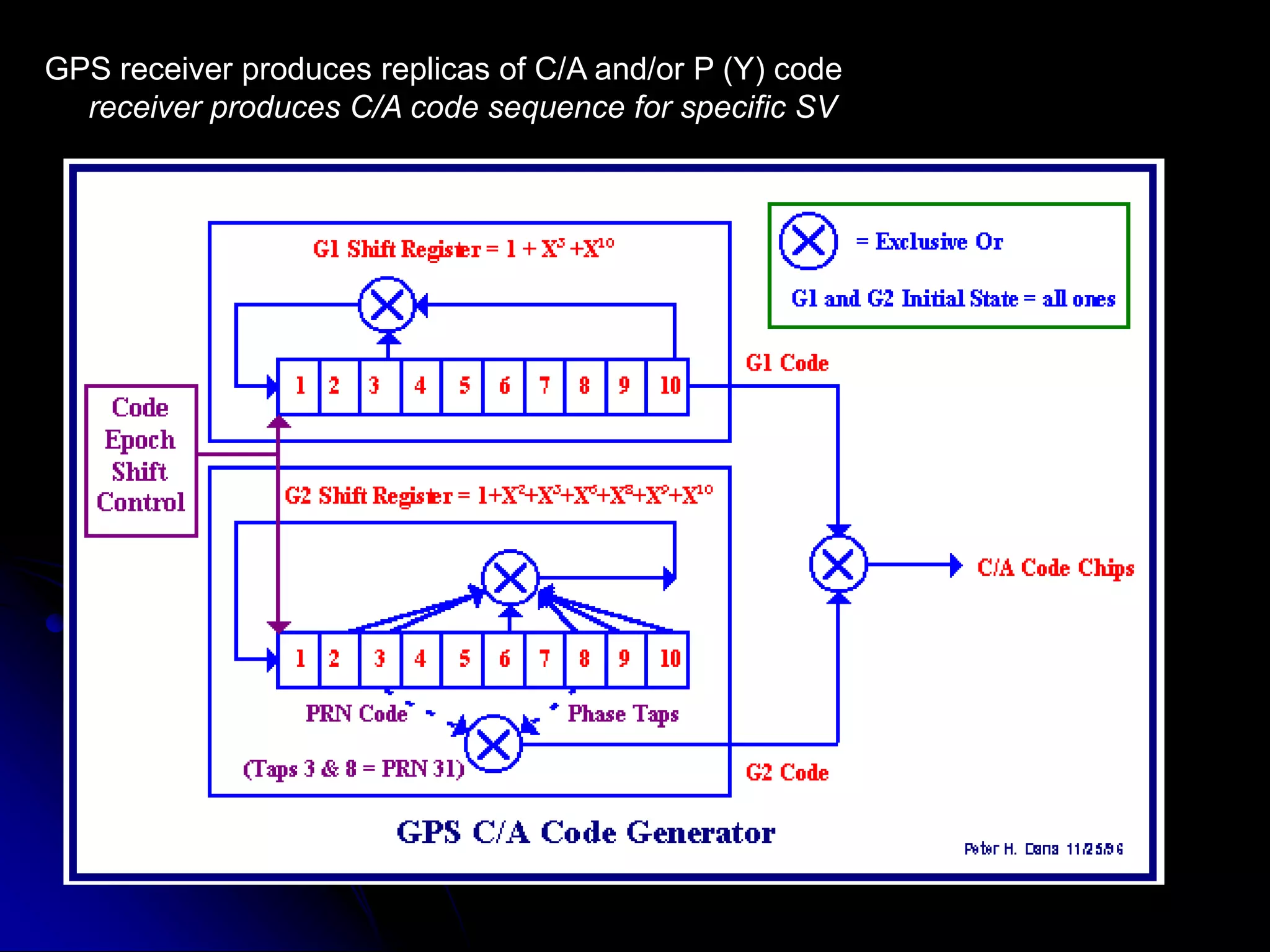
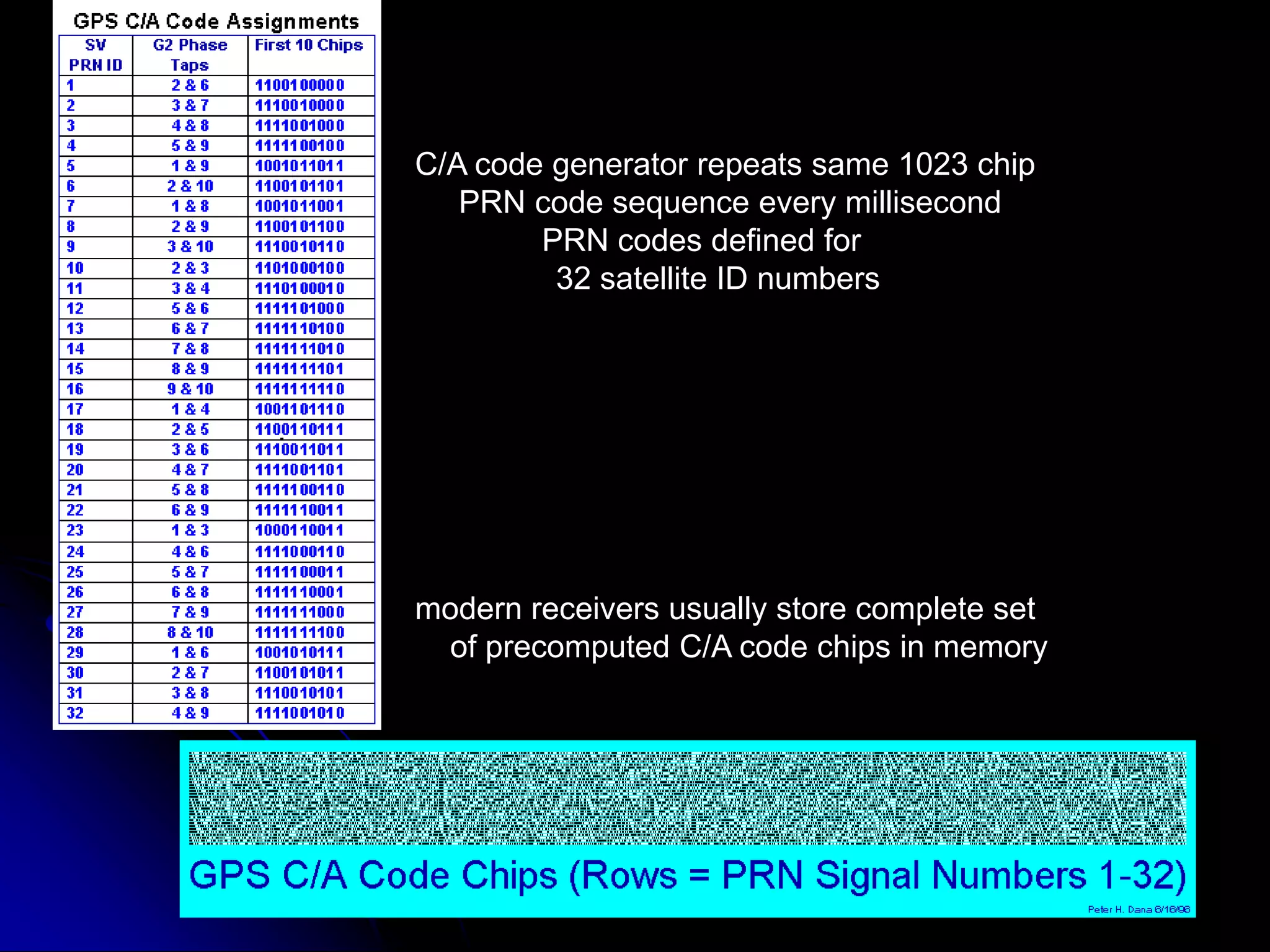
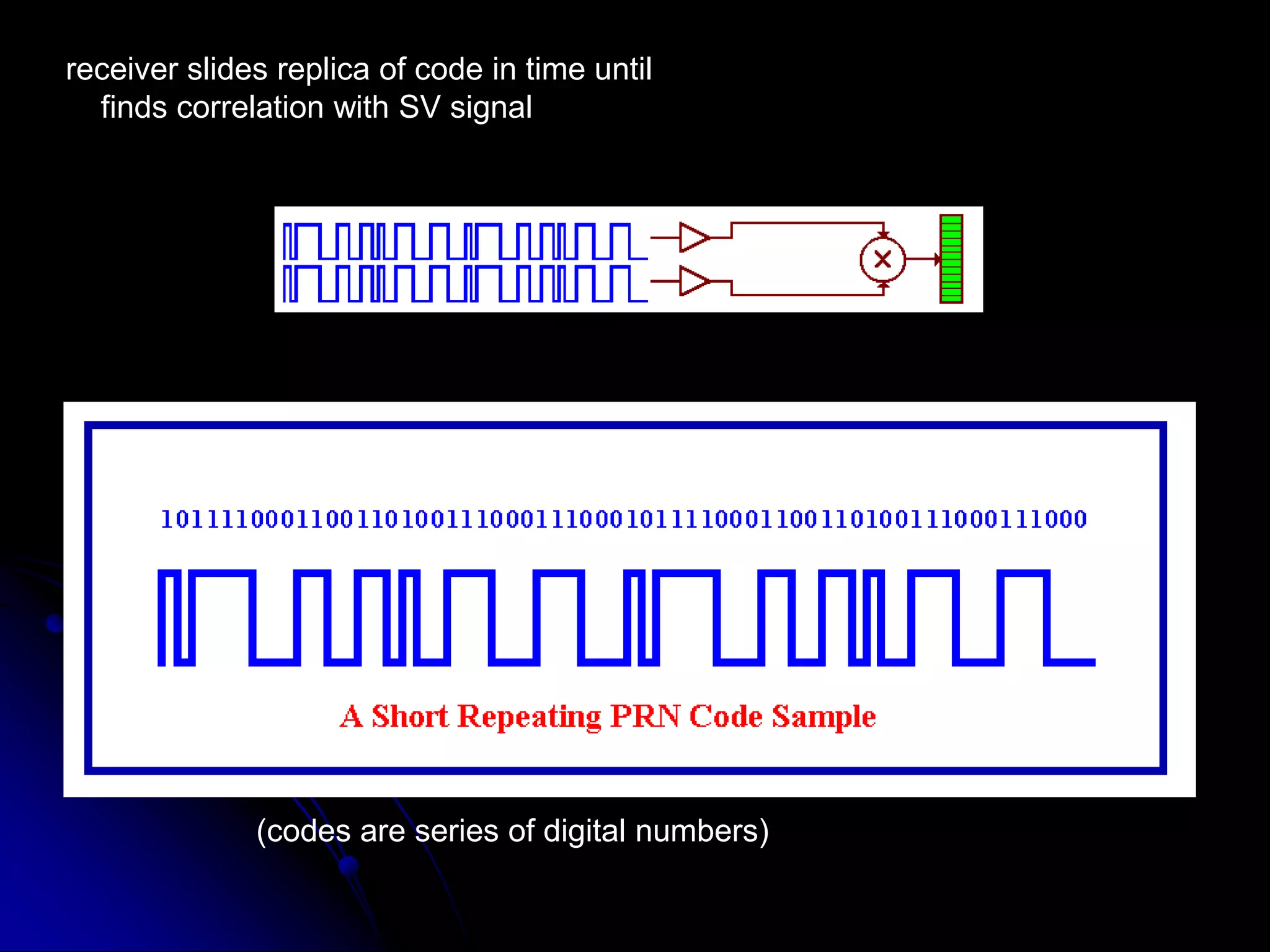
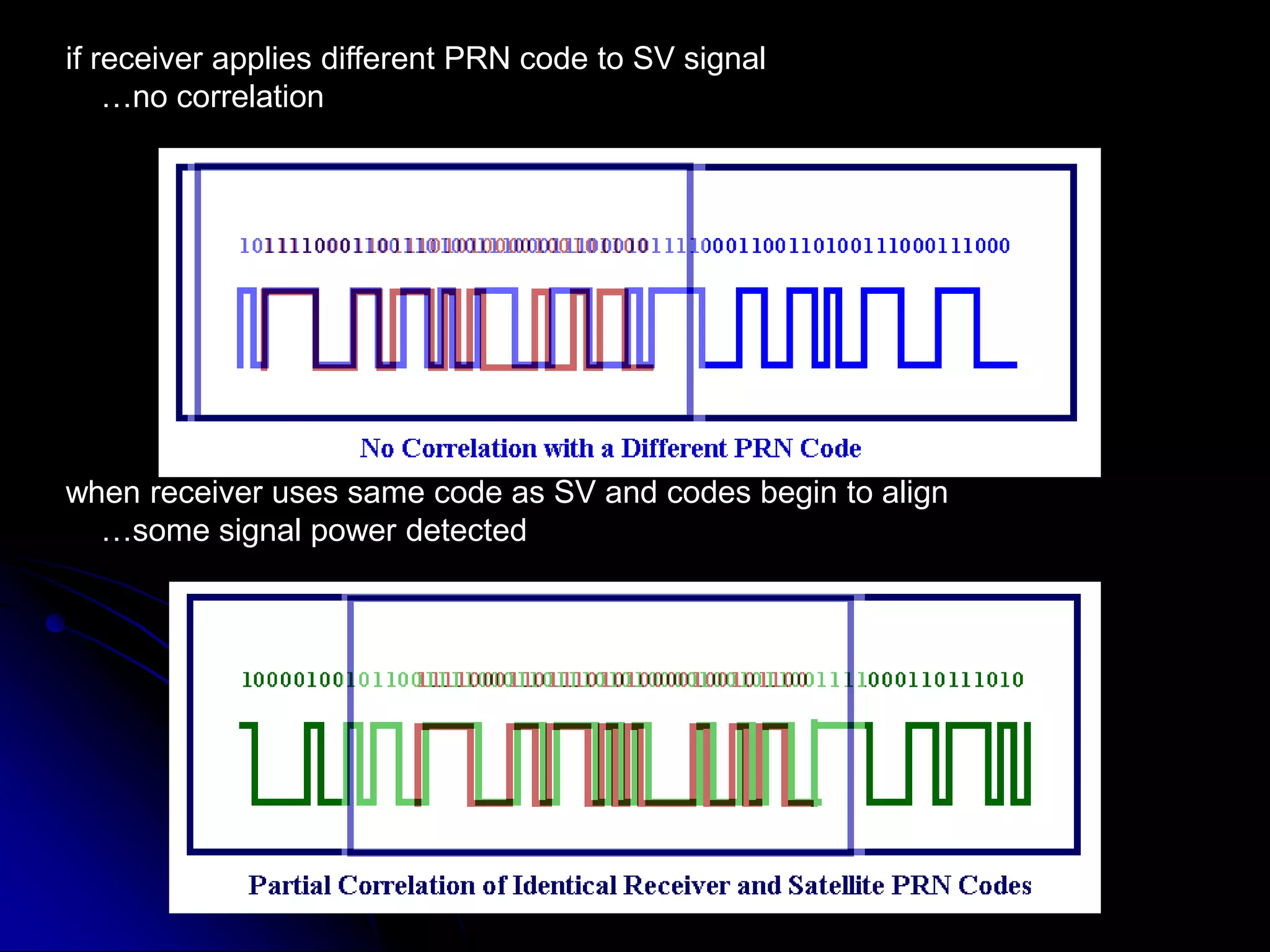
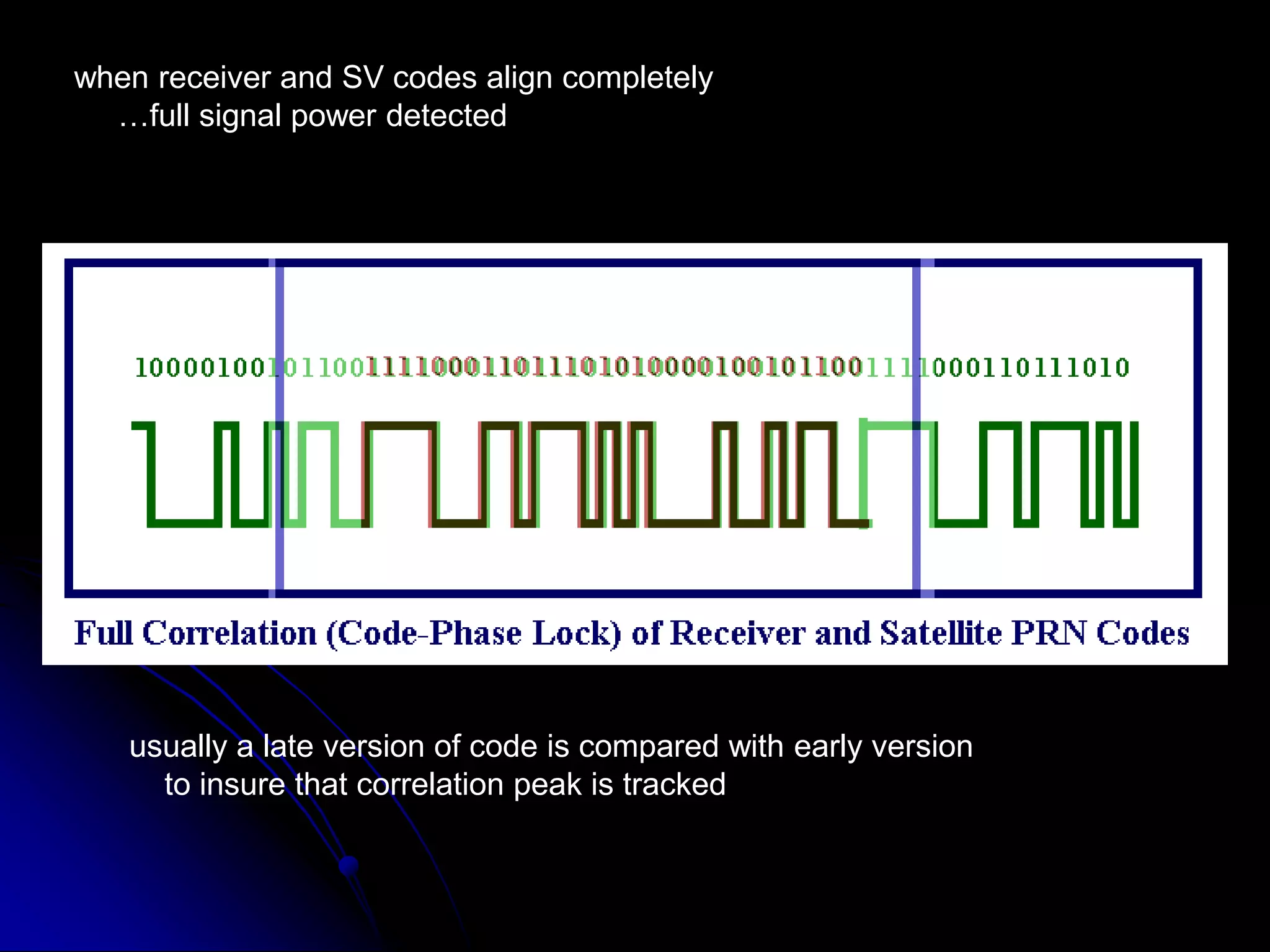
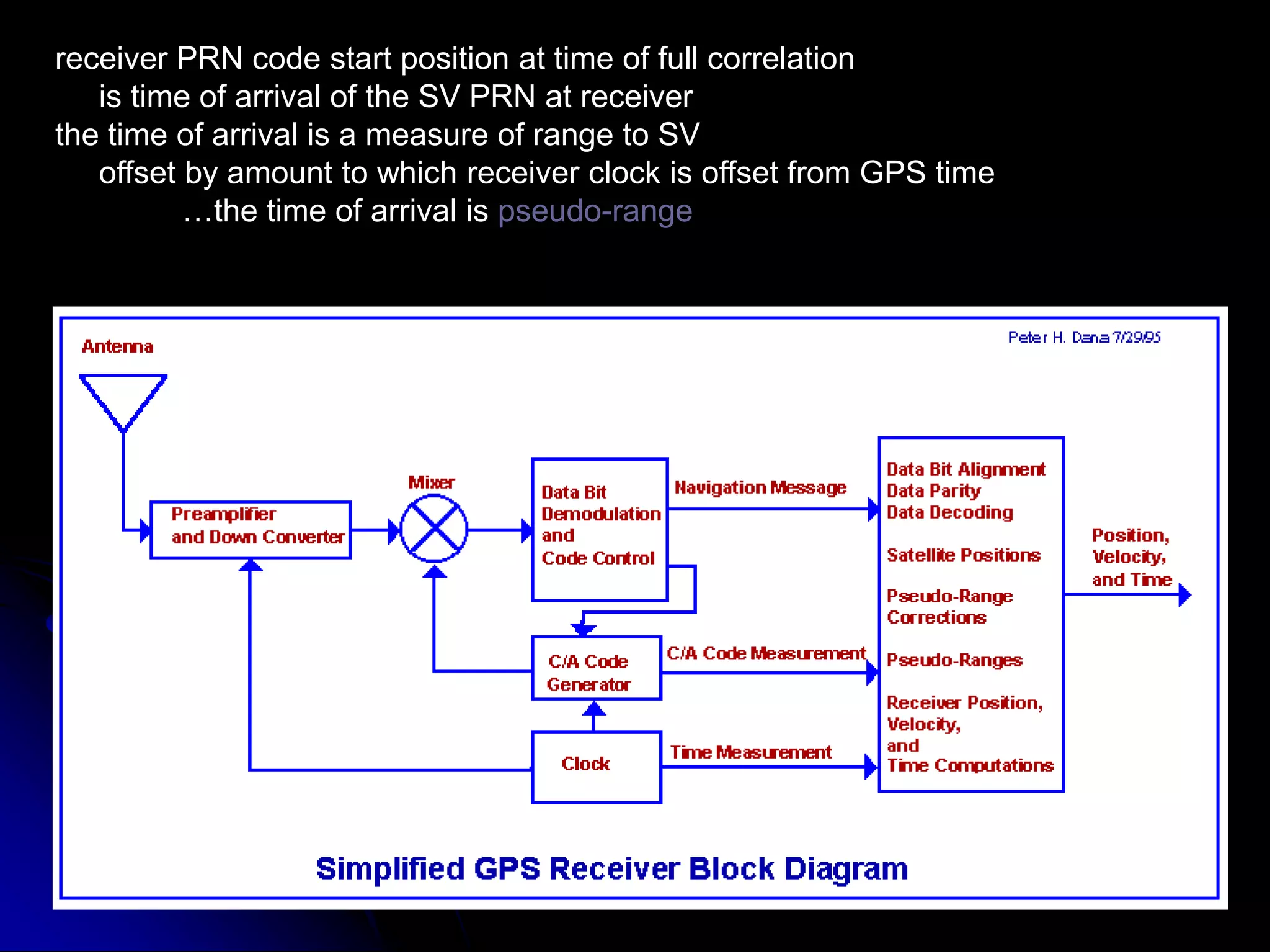
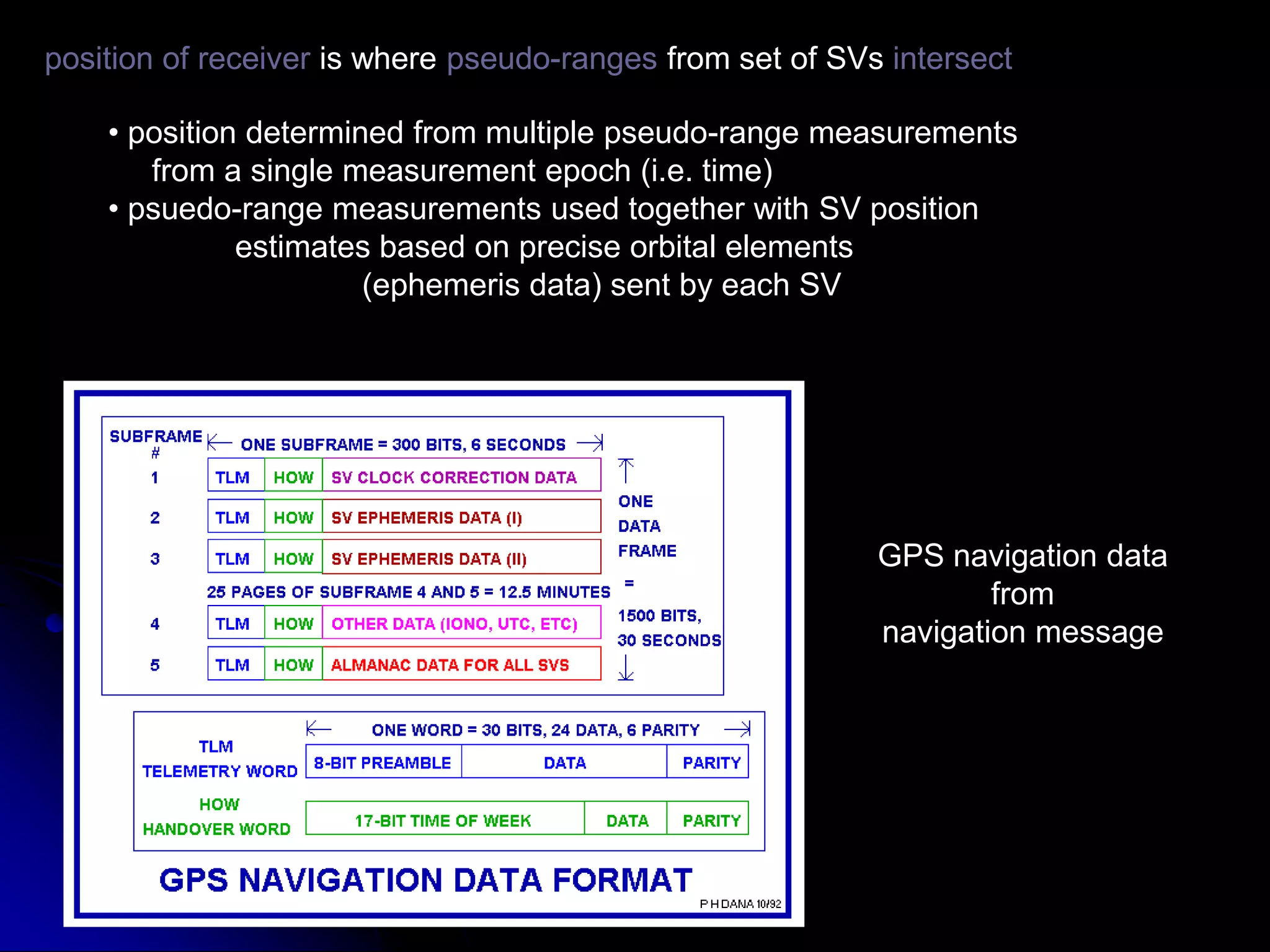
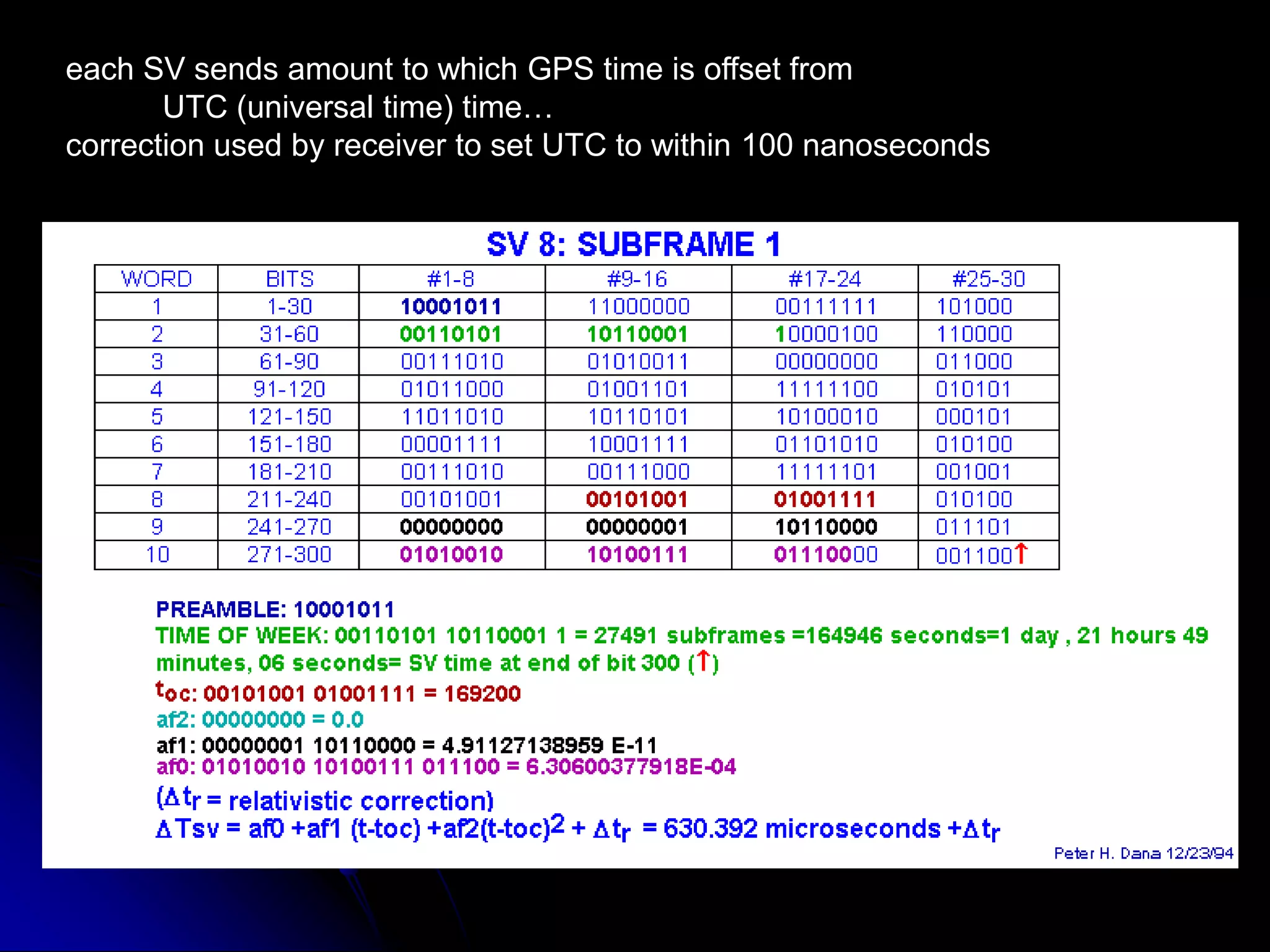
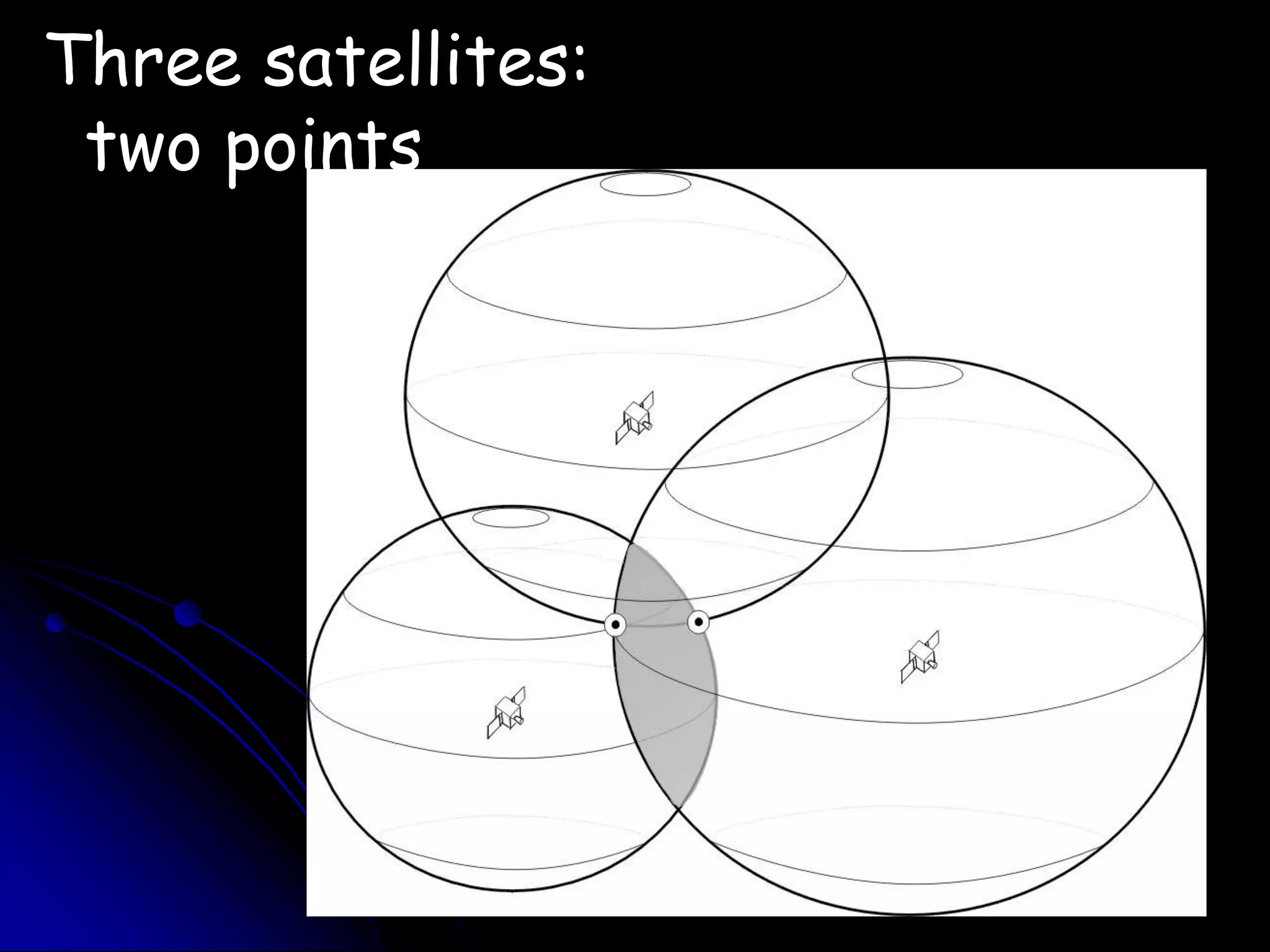
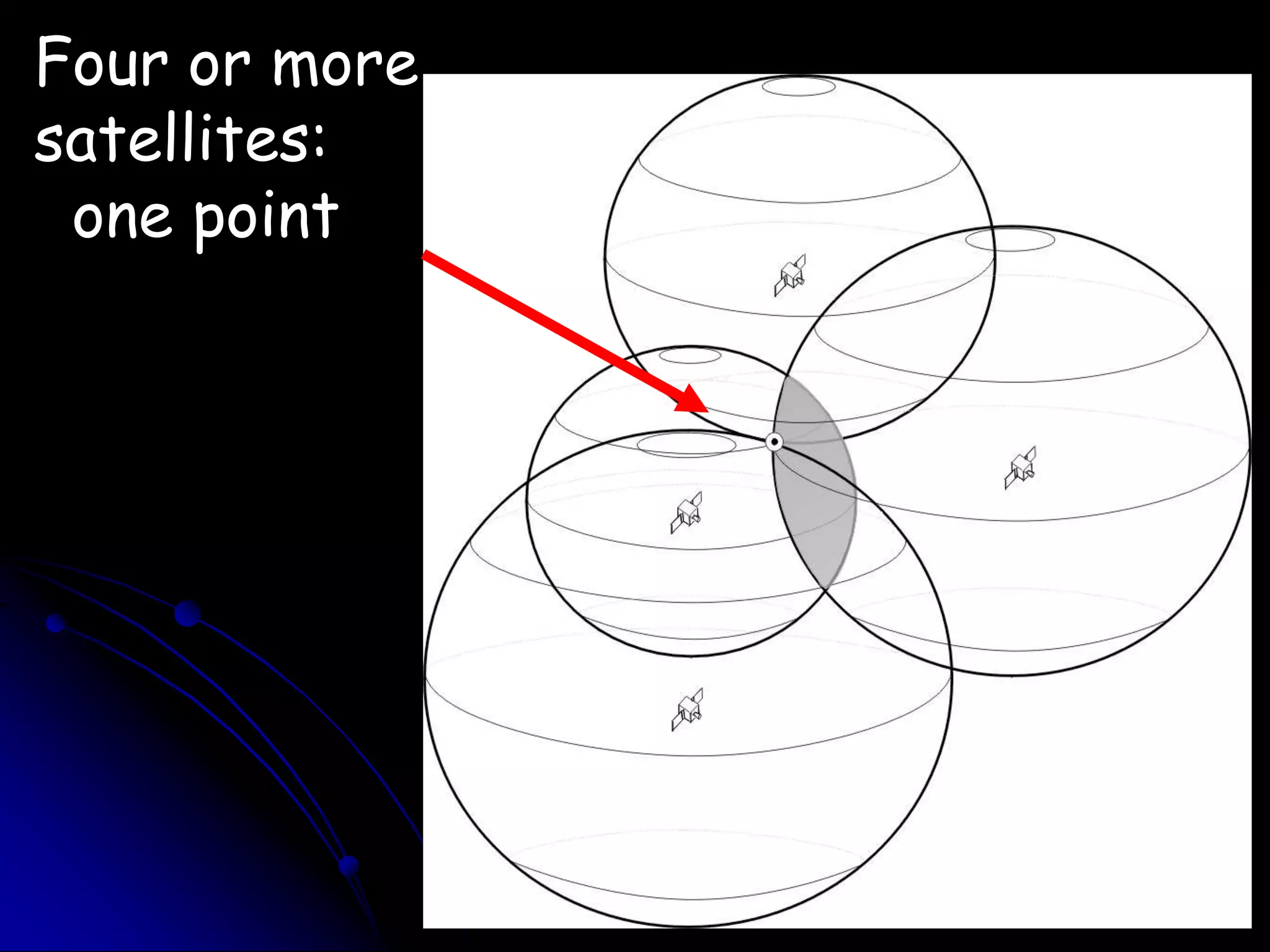
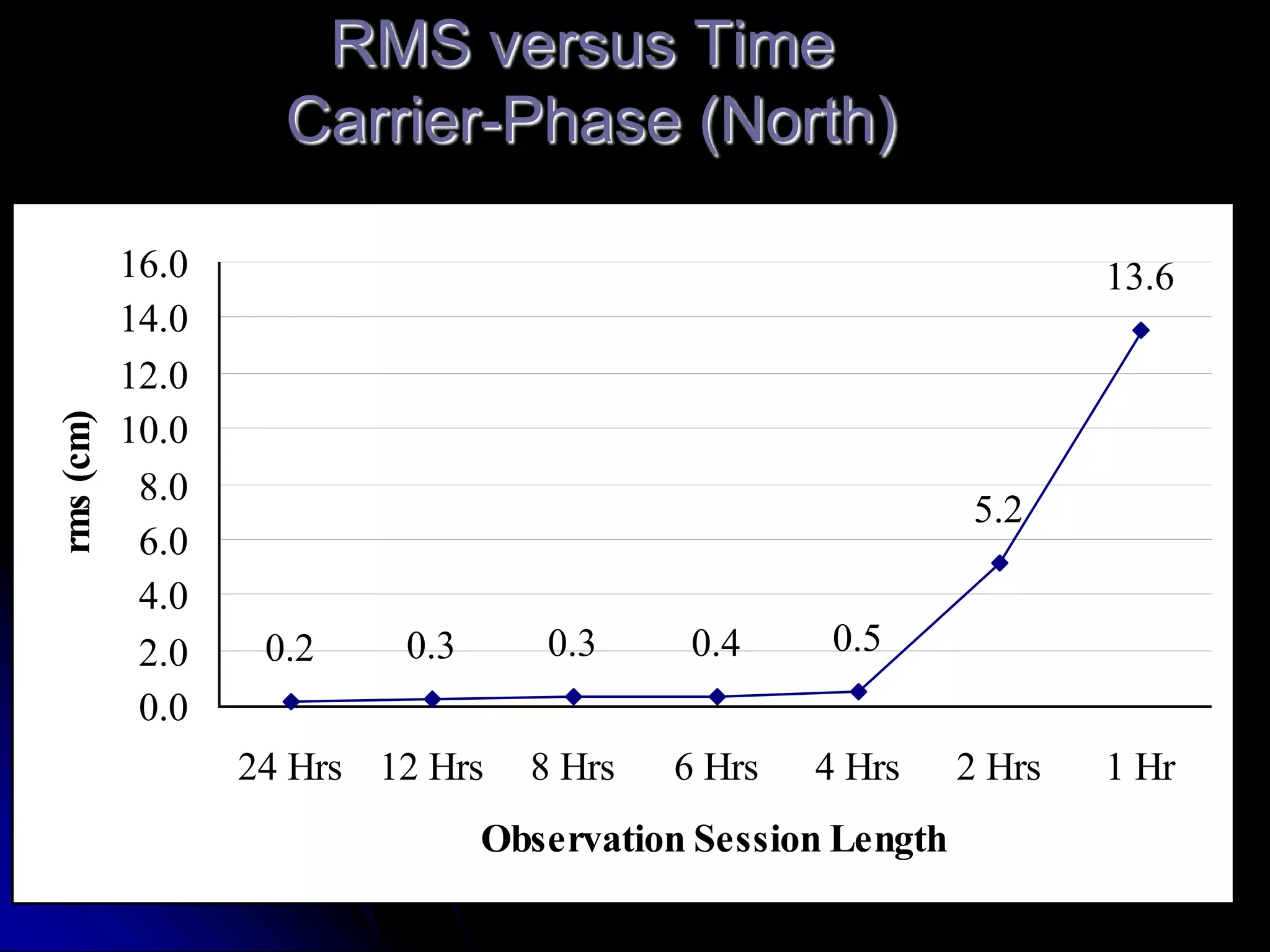
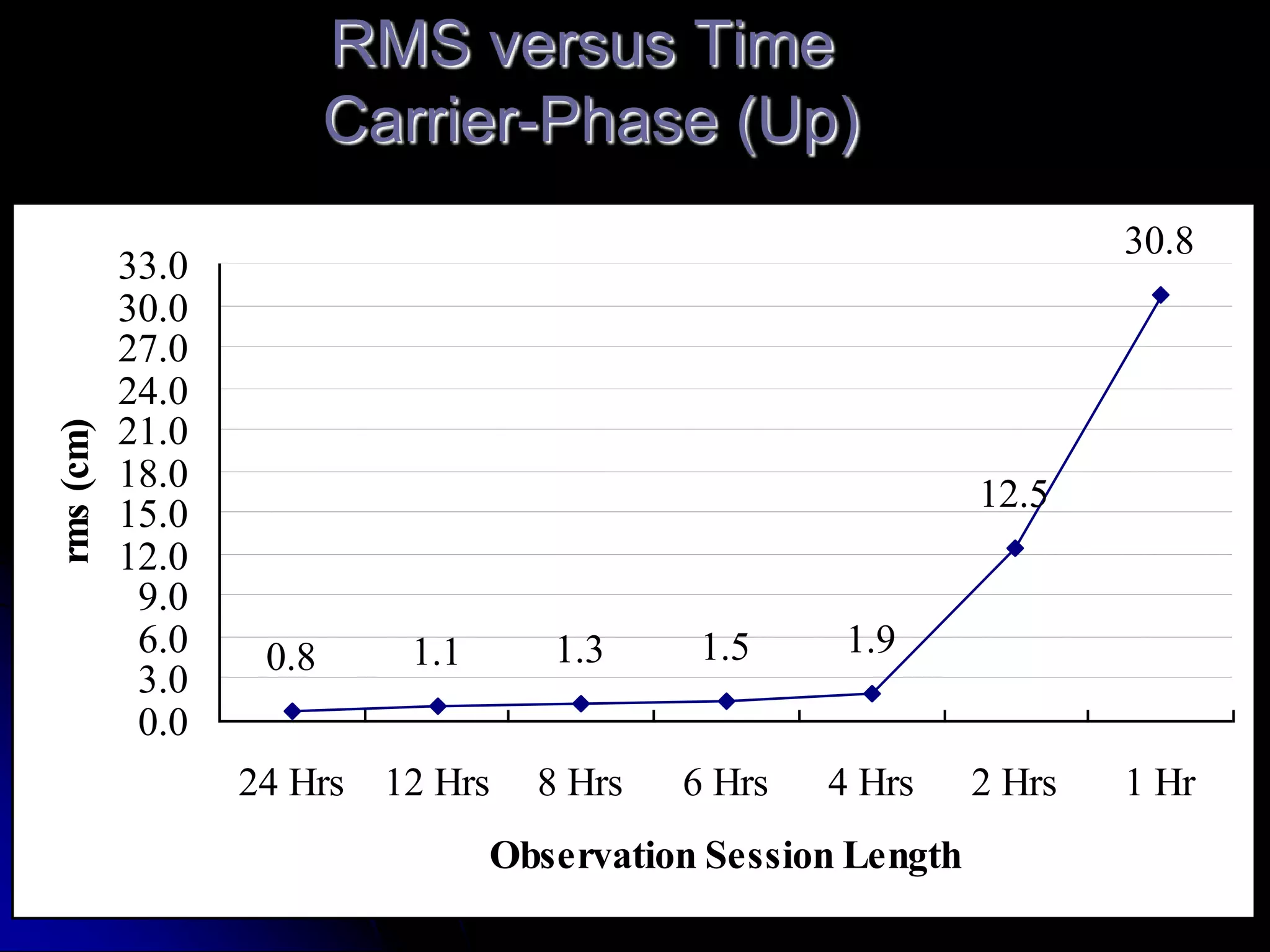
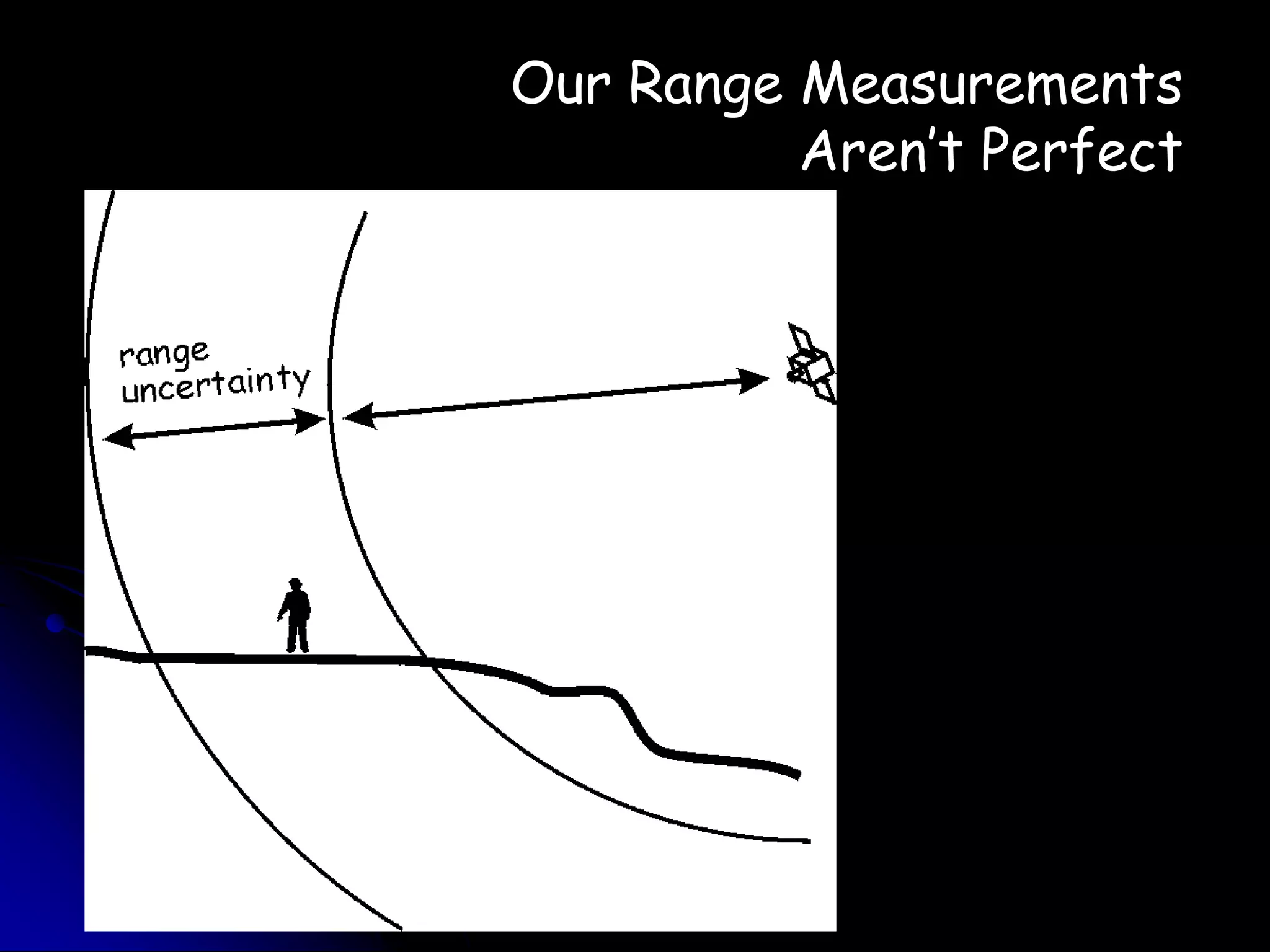
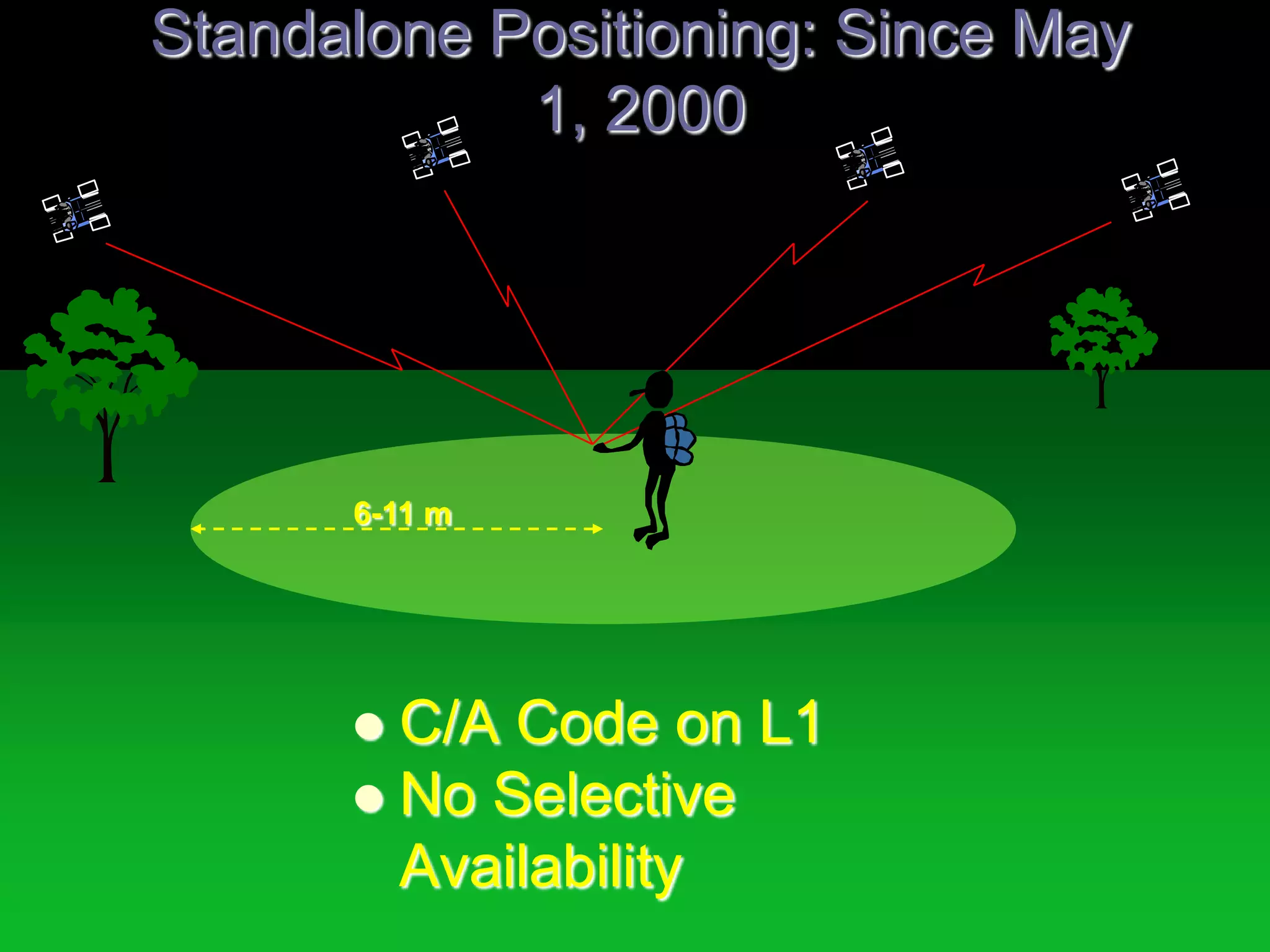
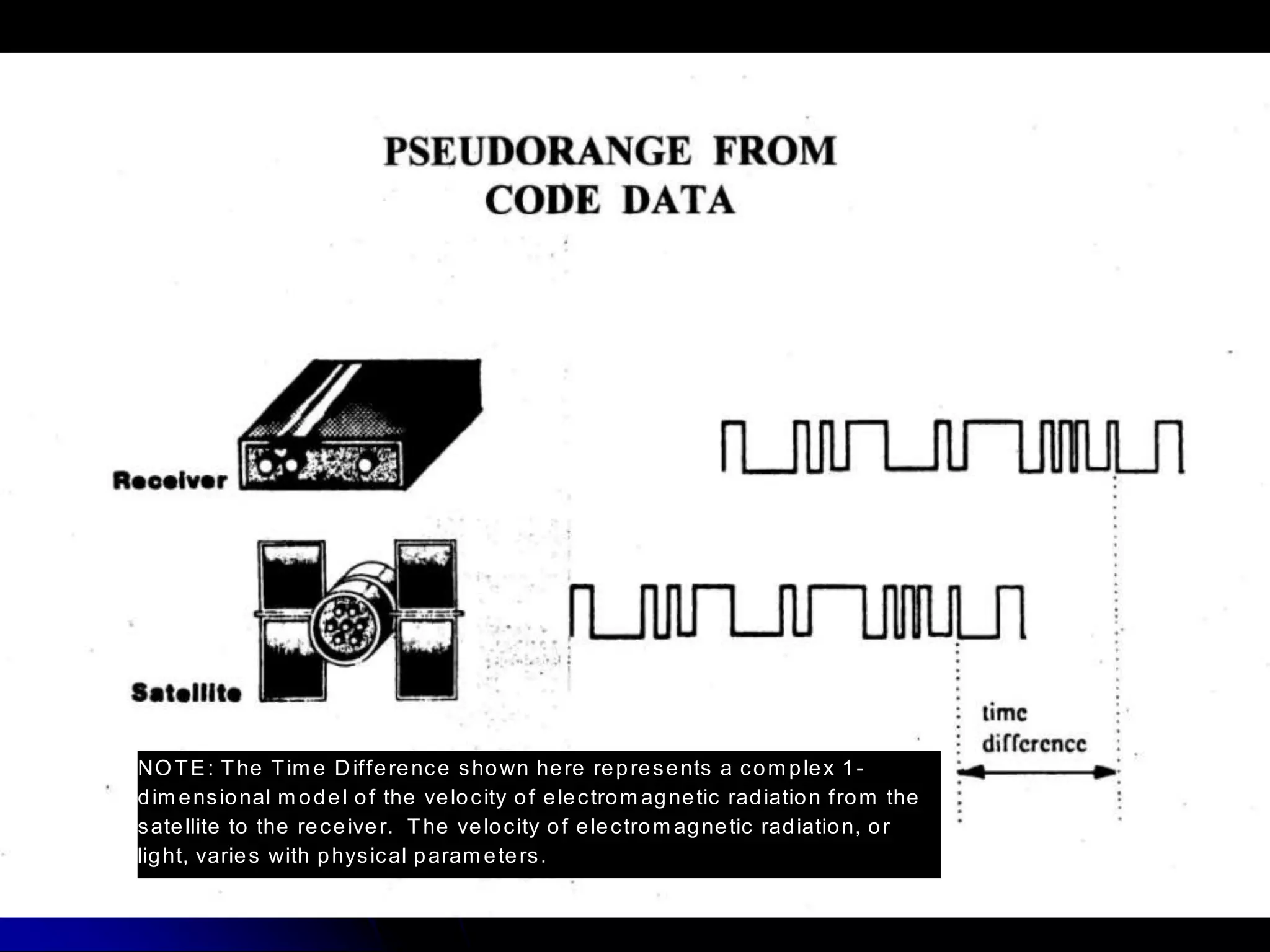
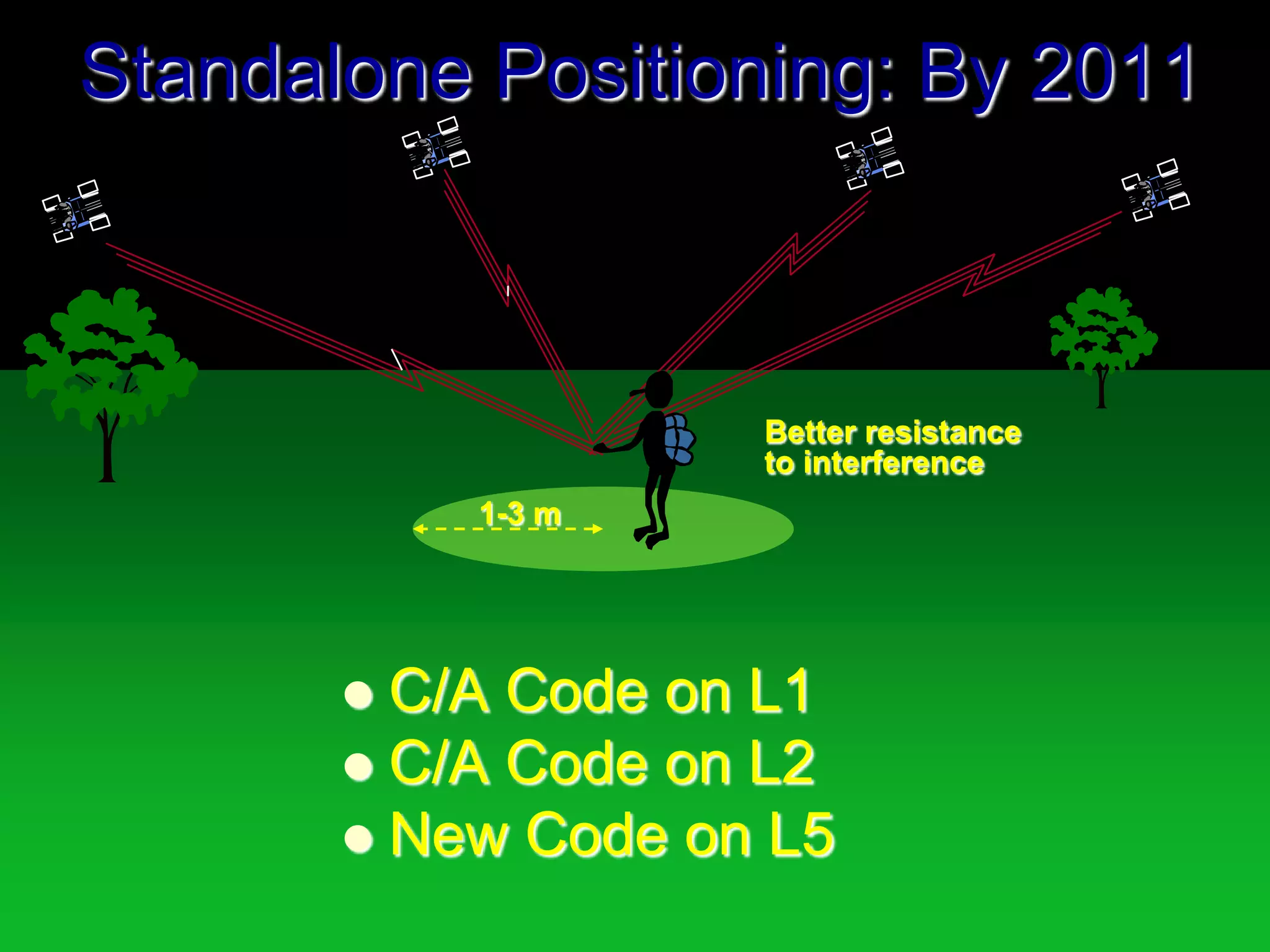
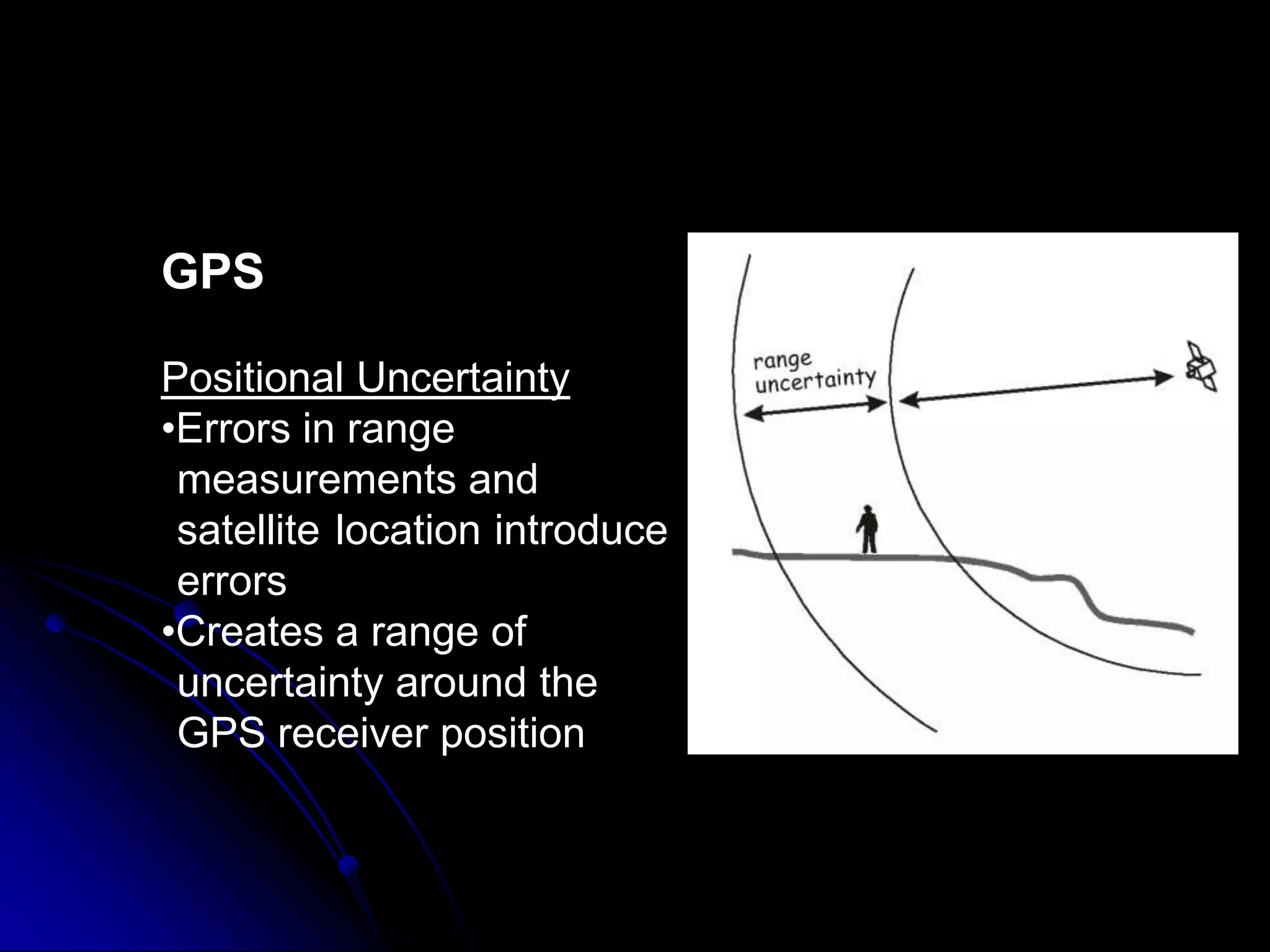
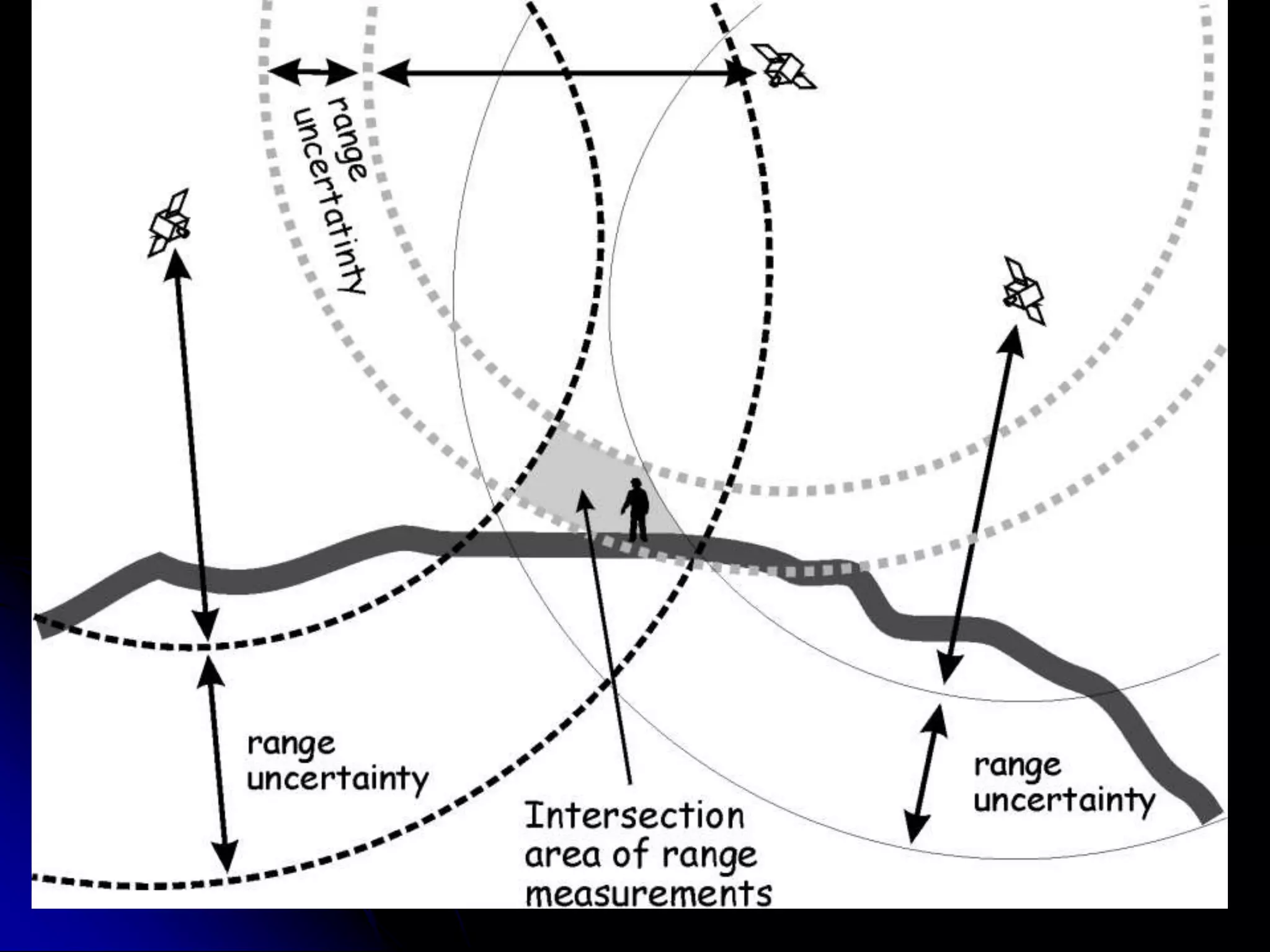
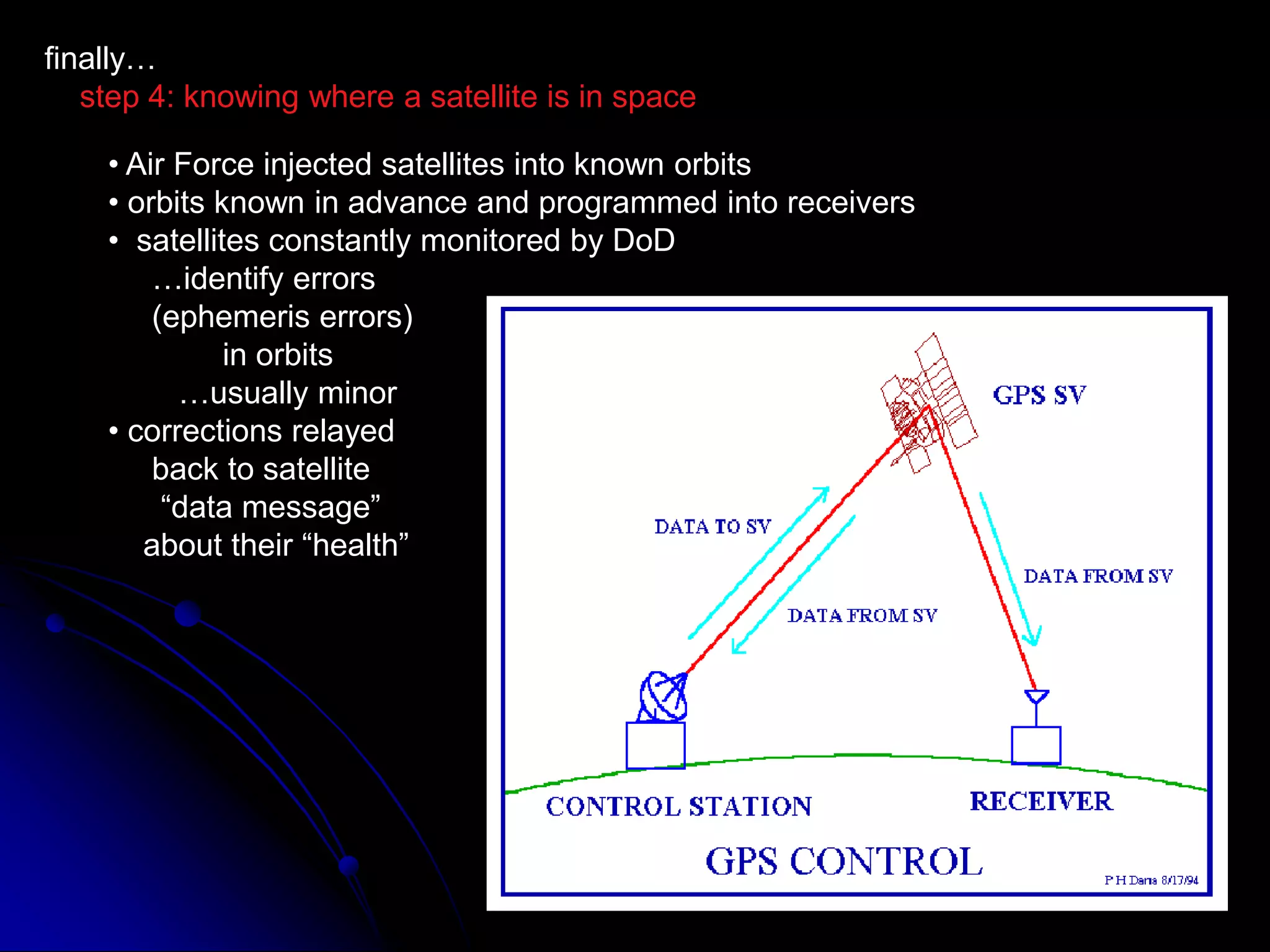
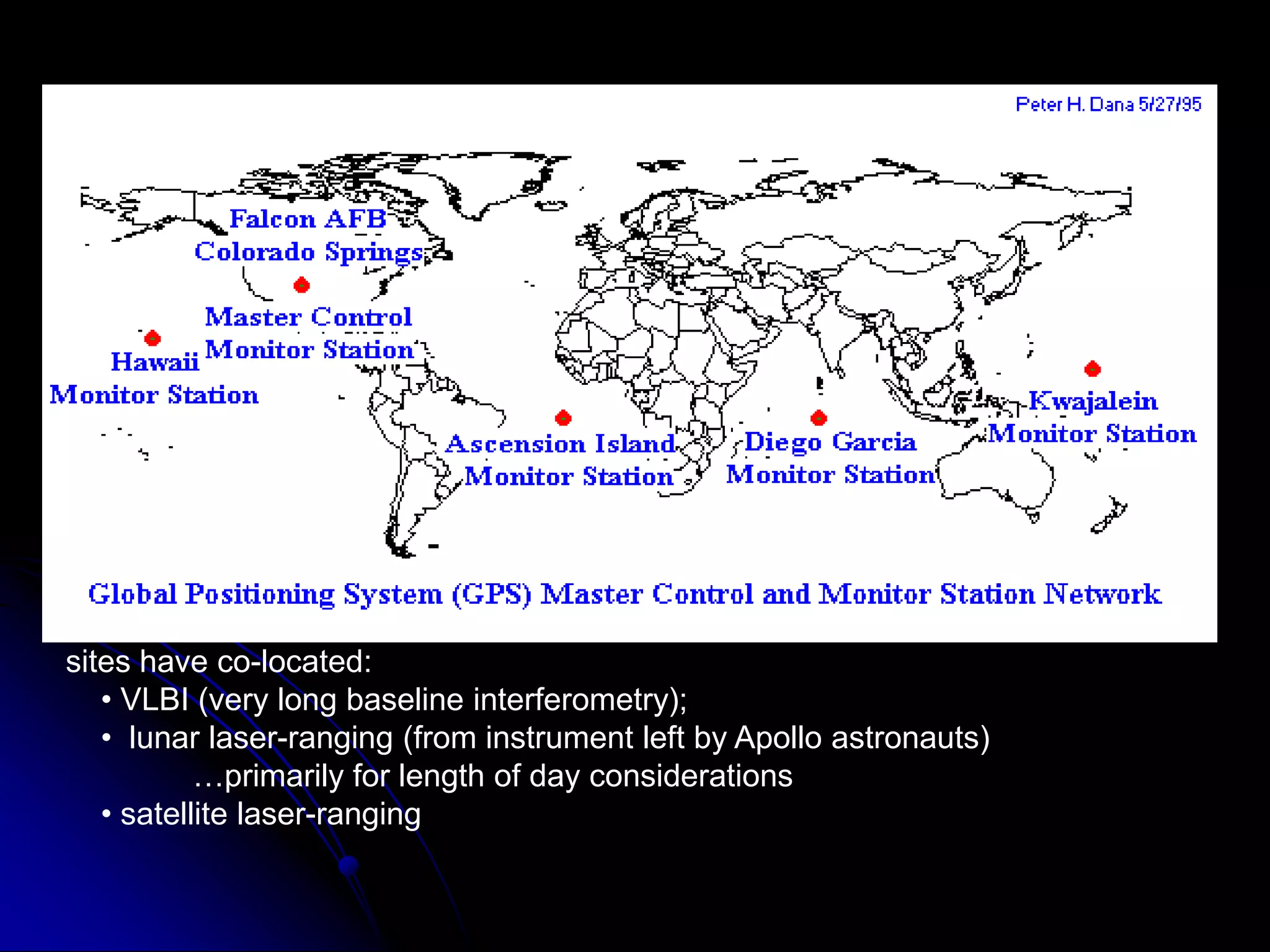
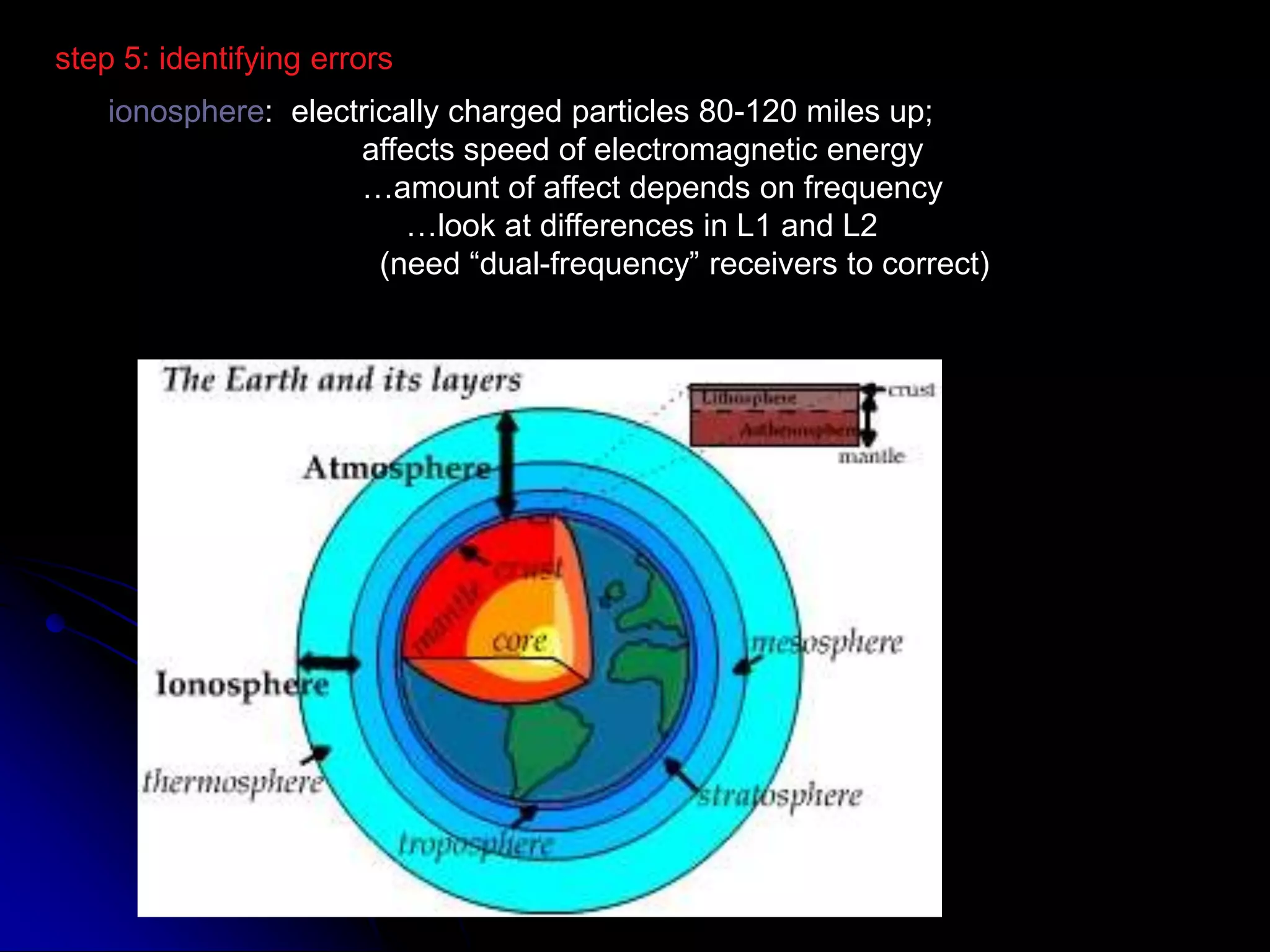
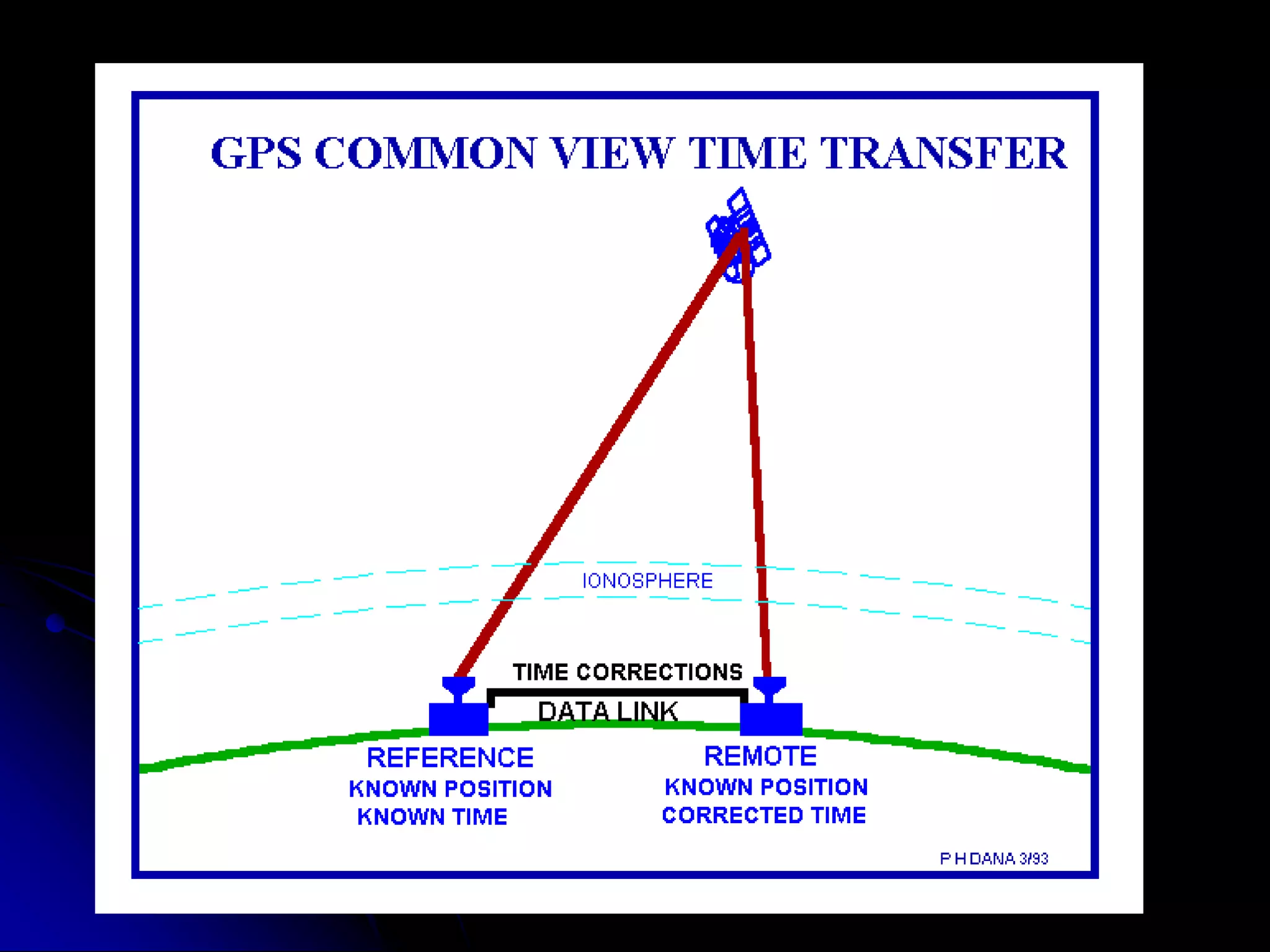
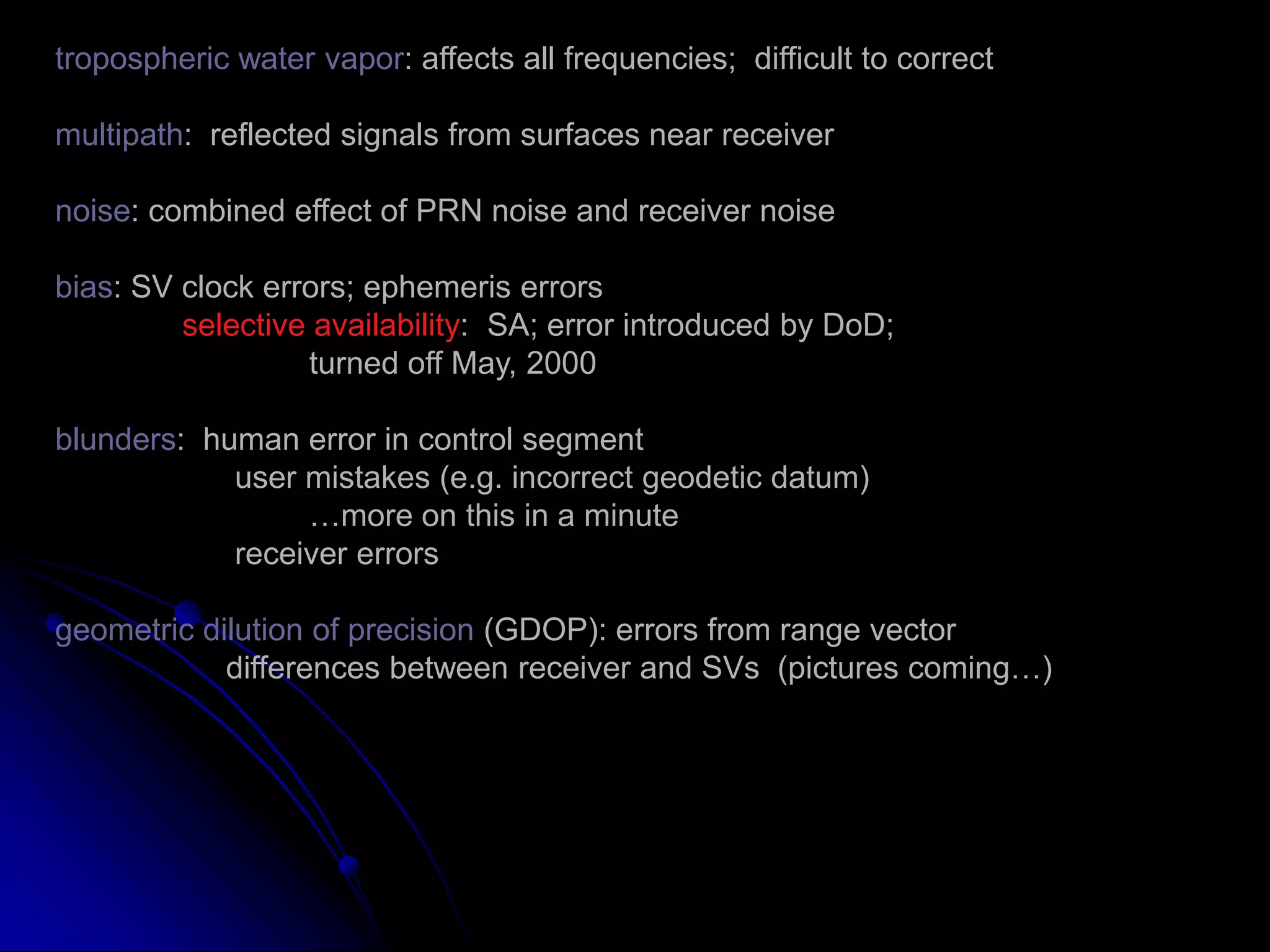
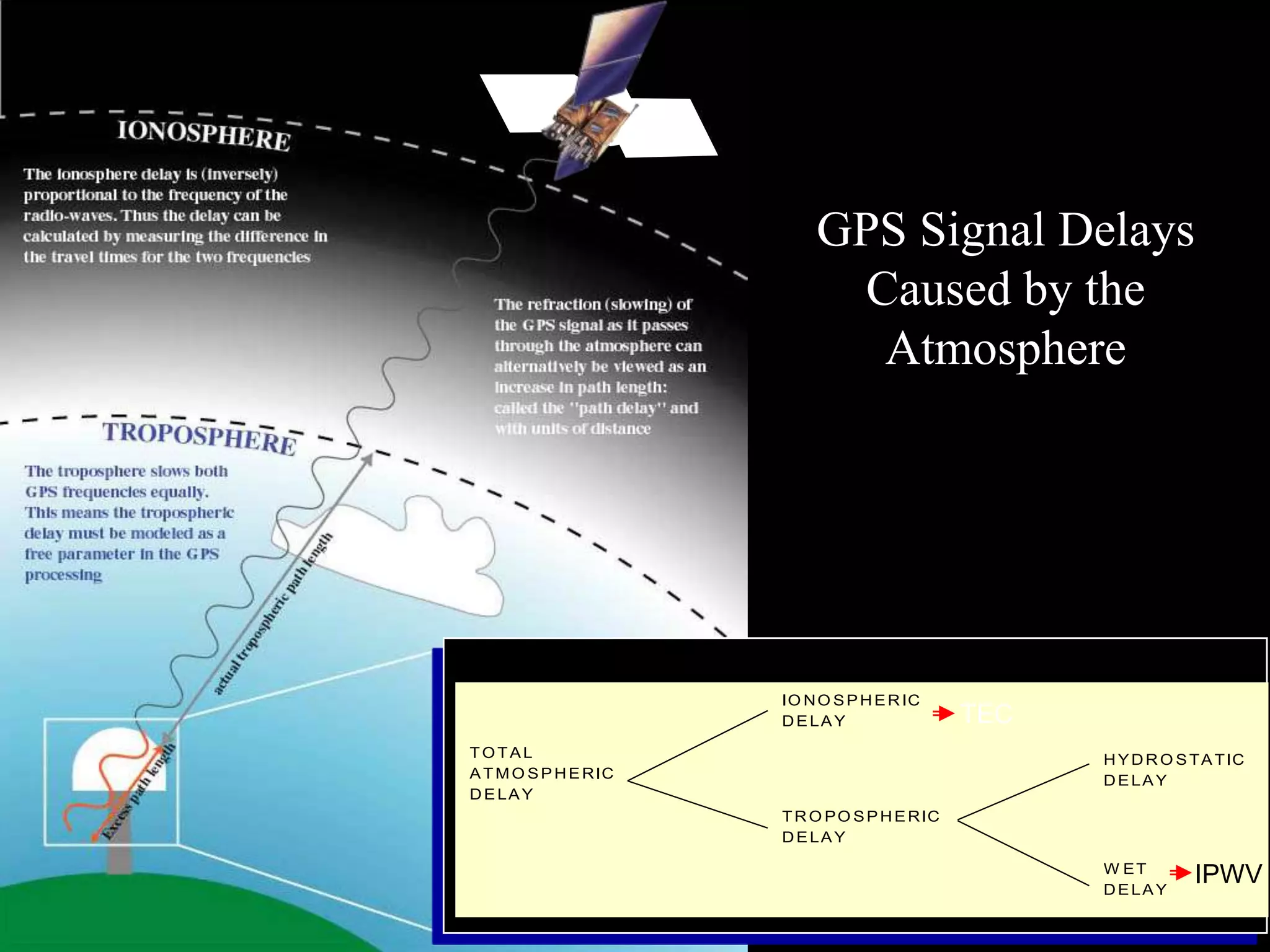
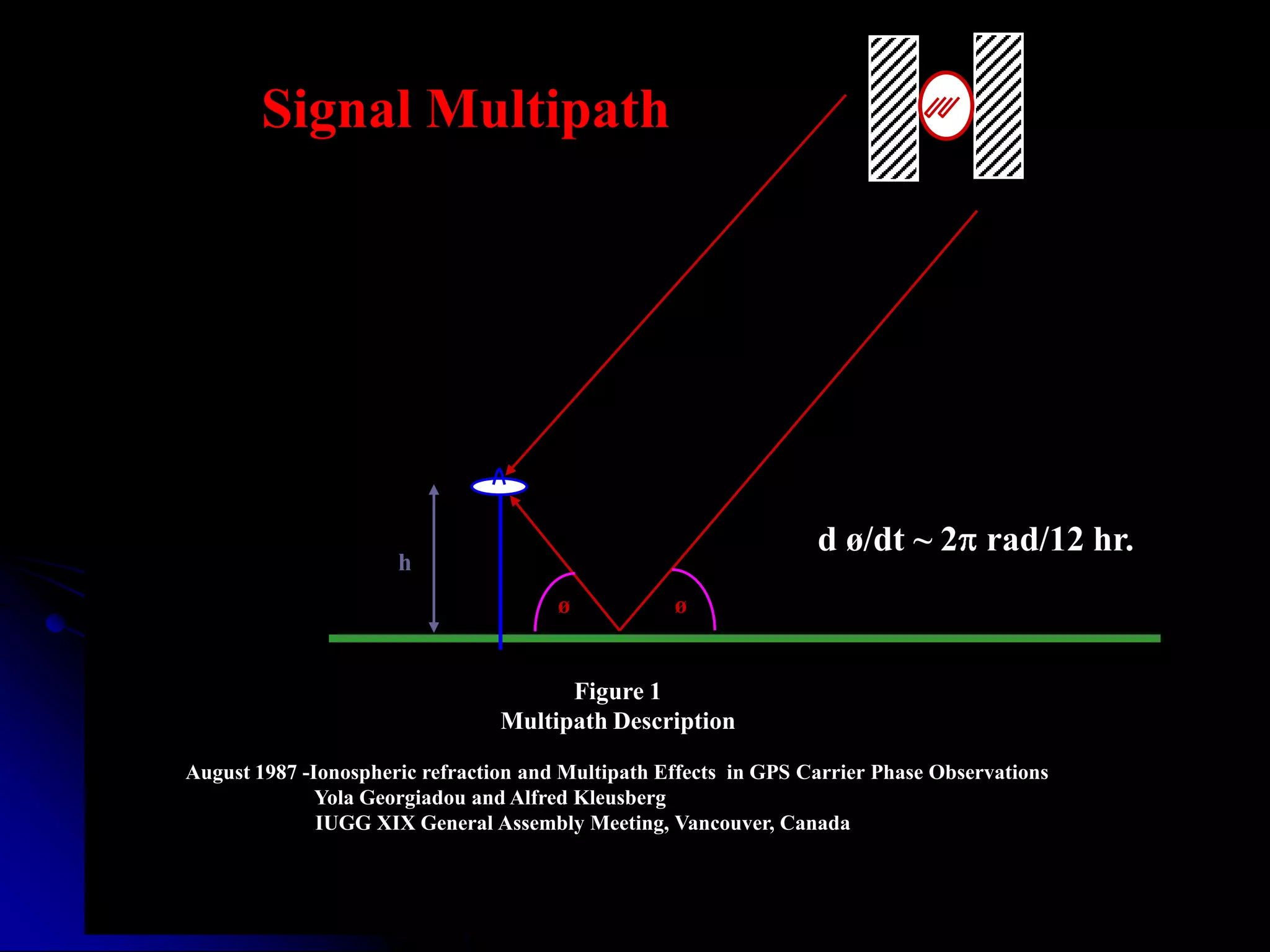
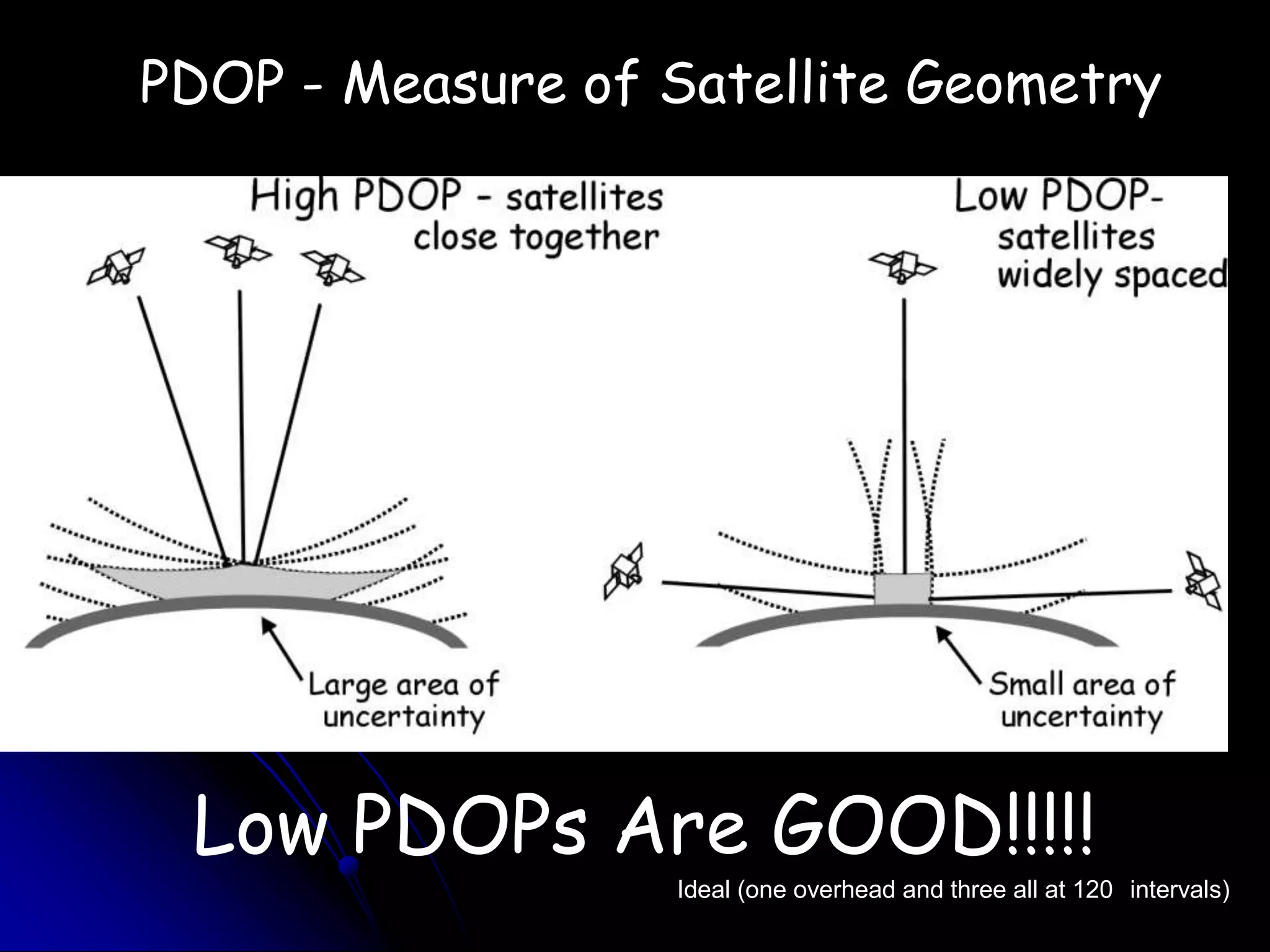
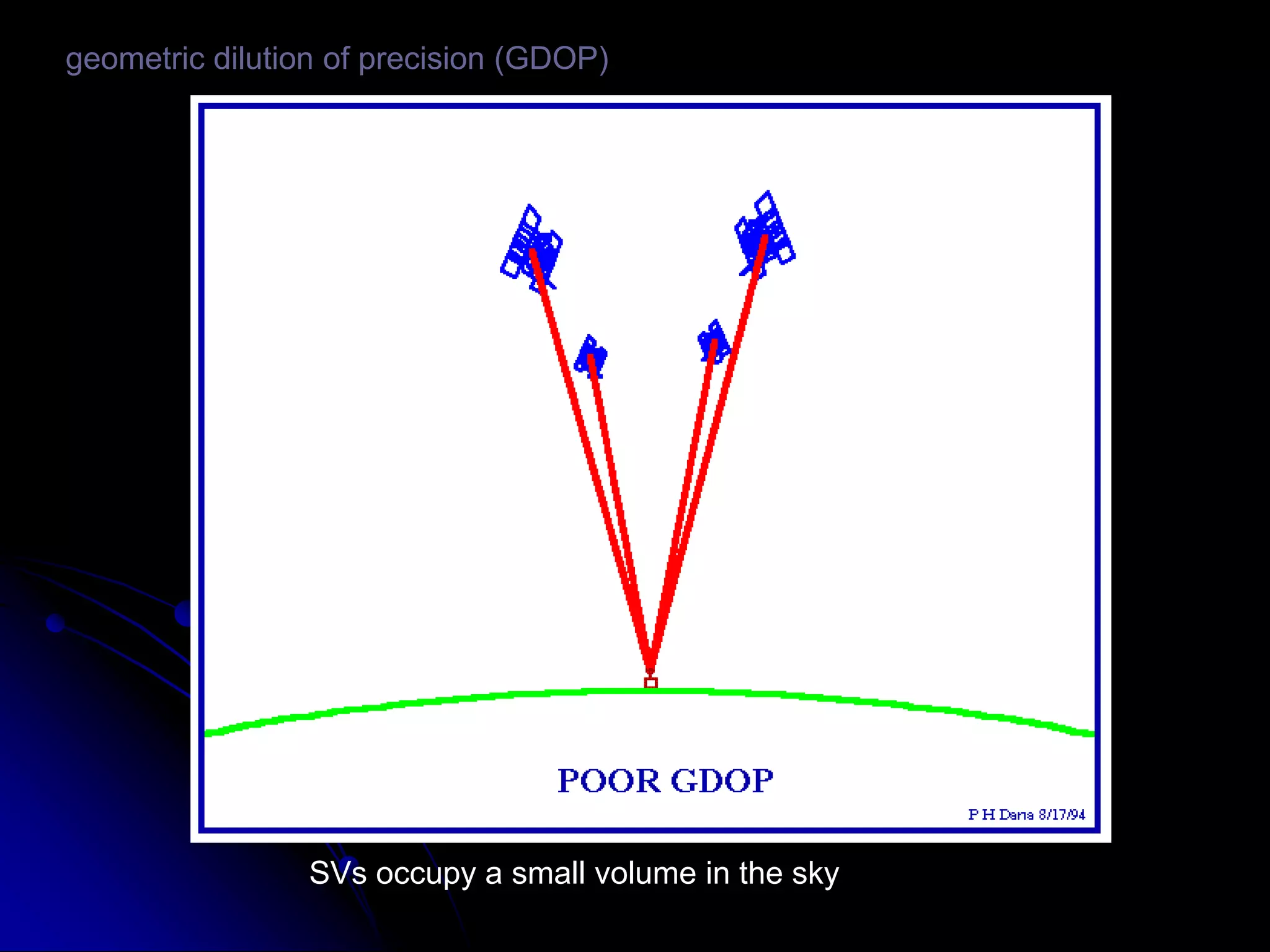
Methods of calculating position through satellite data, errors affecting accuracy, and relativistic corrections.
Methods of calculating position through satellite data, errors affecting accuracy, and relativistic corrections.
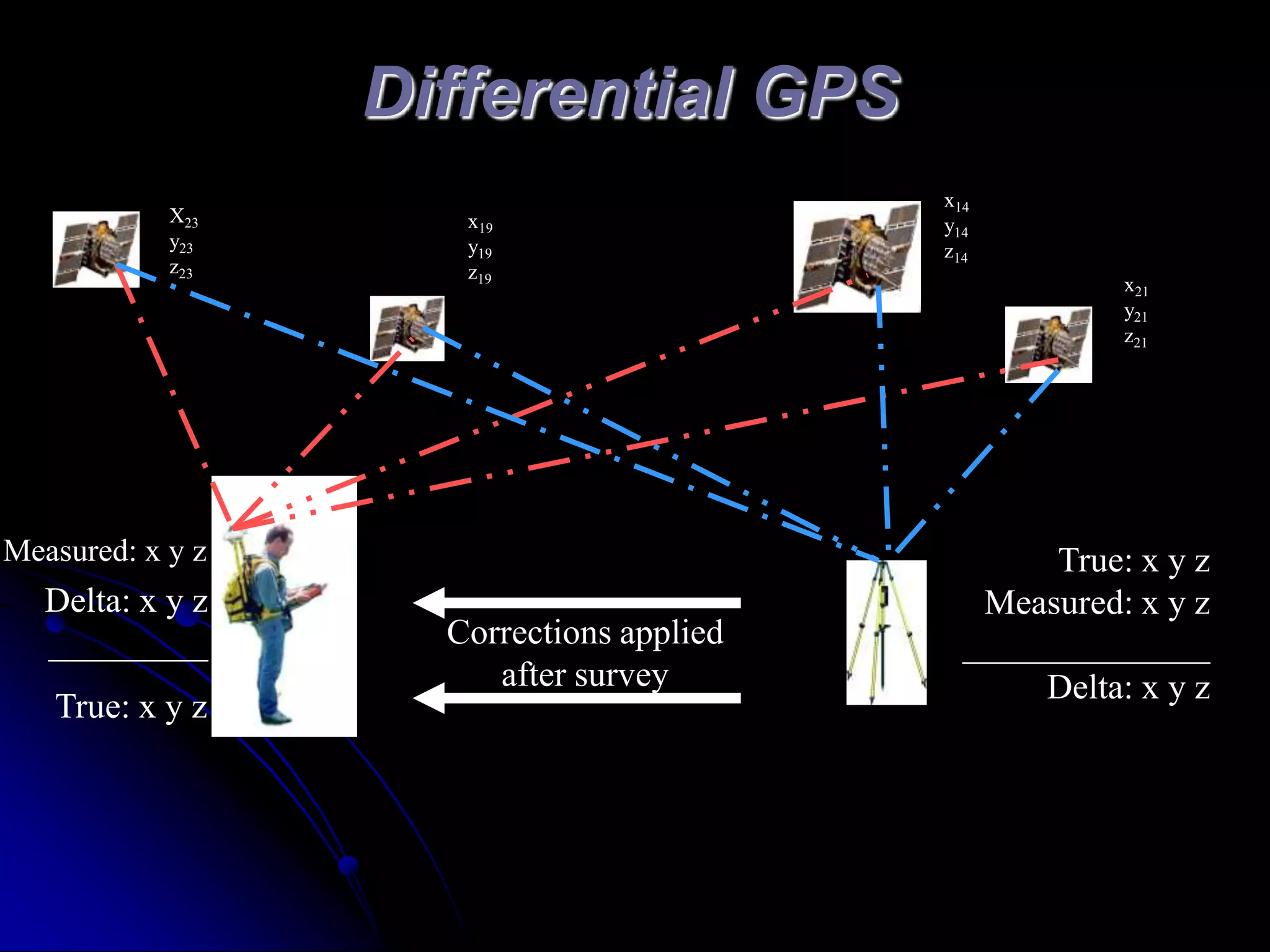
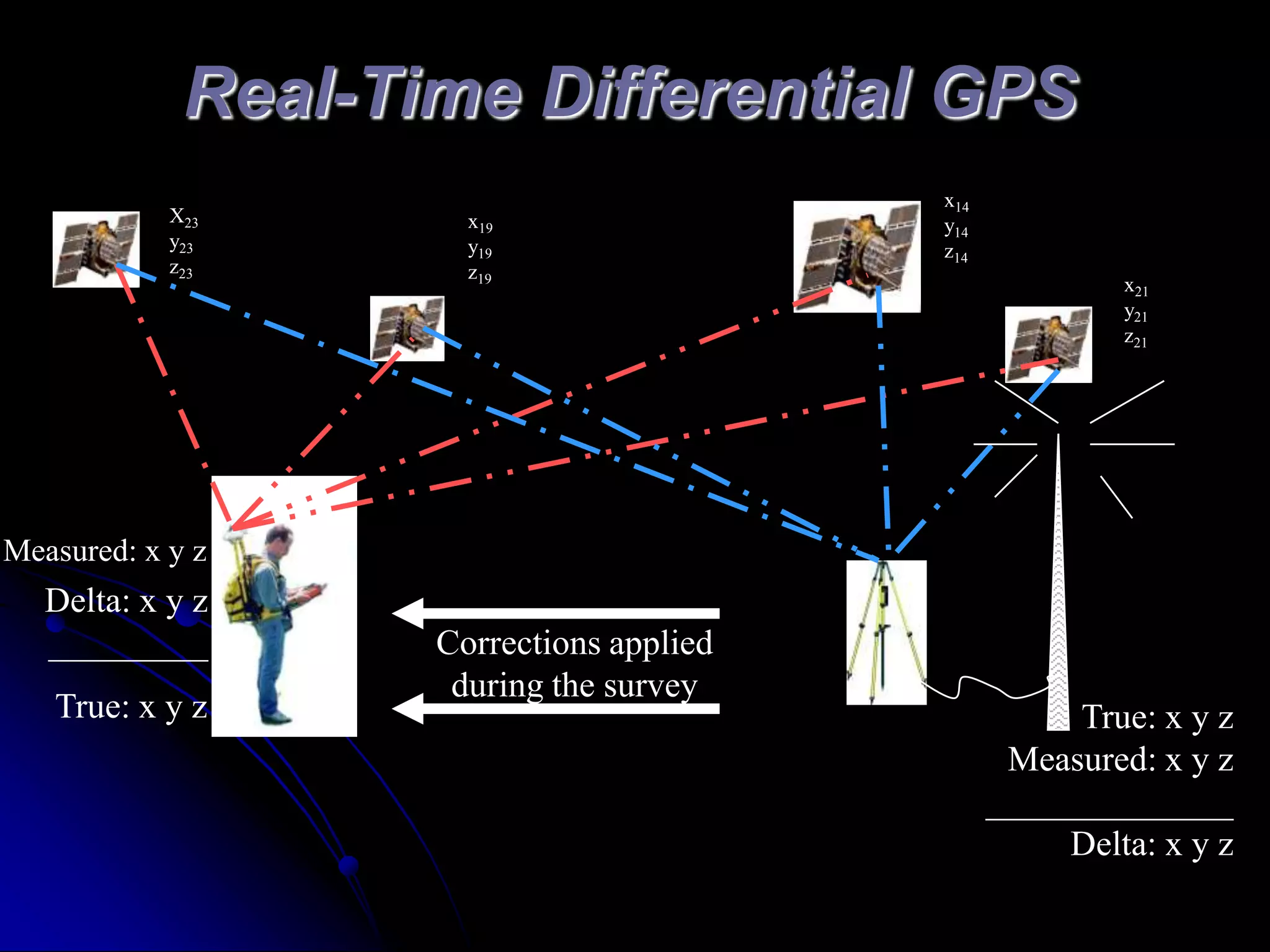
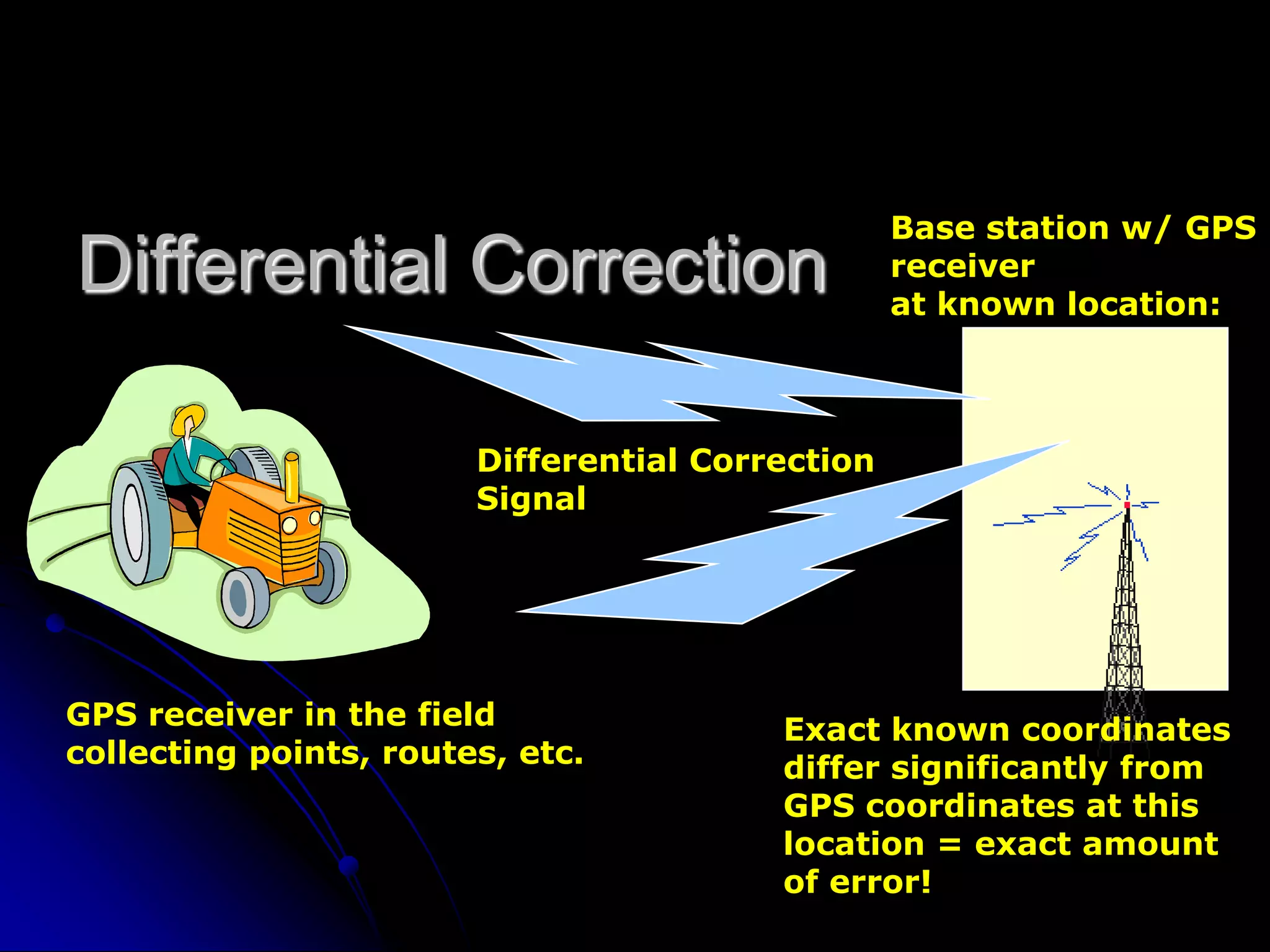
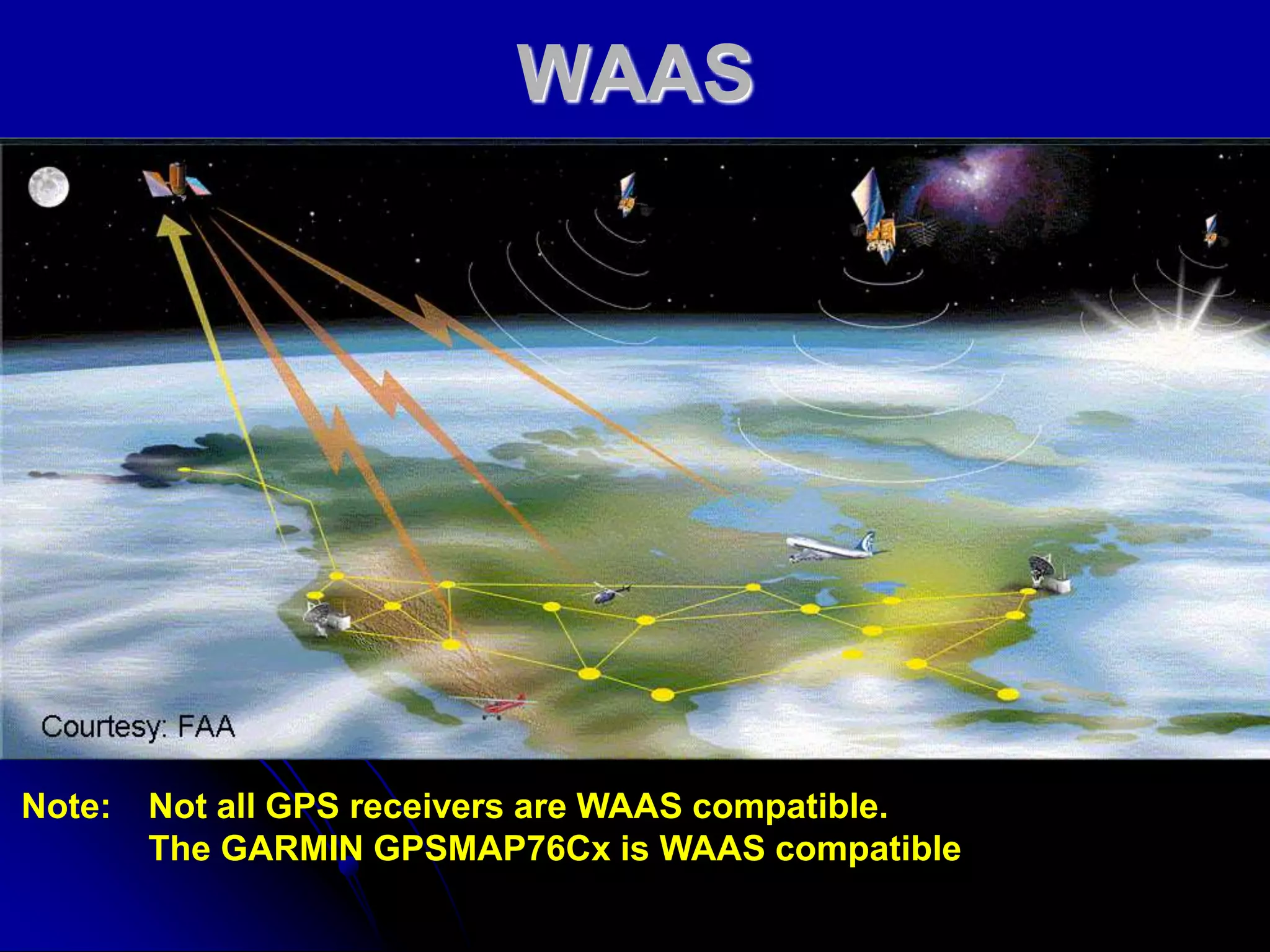
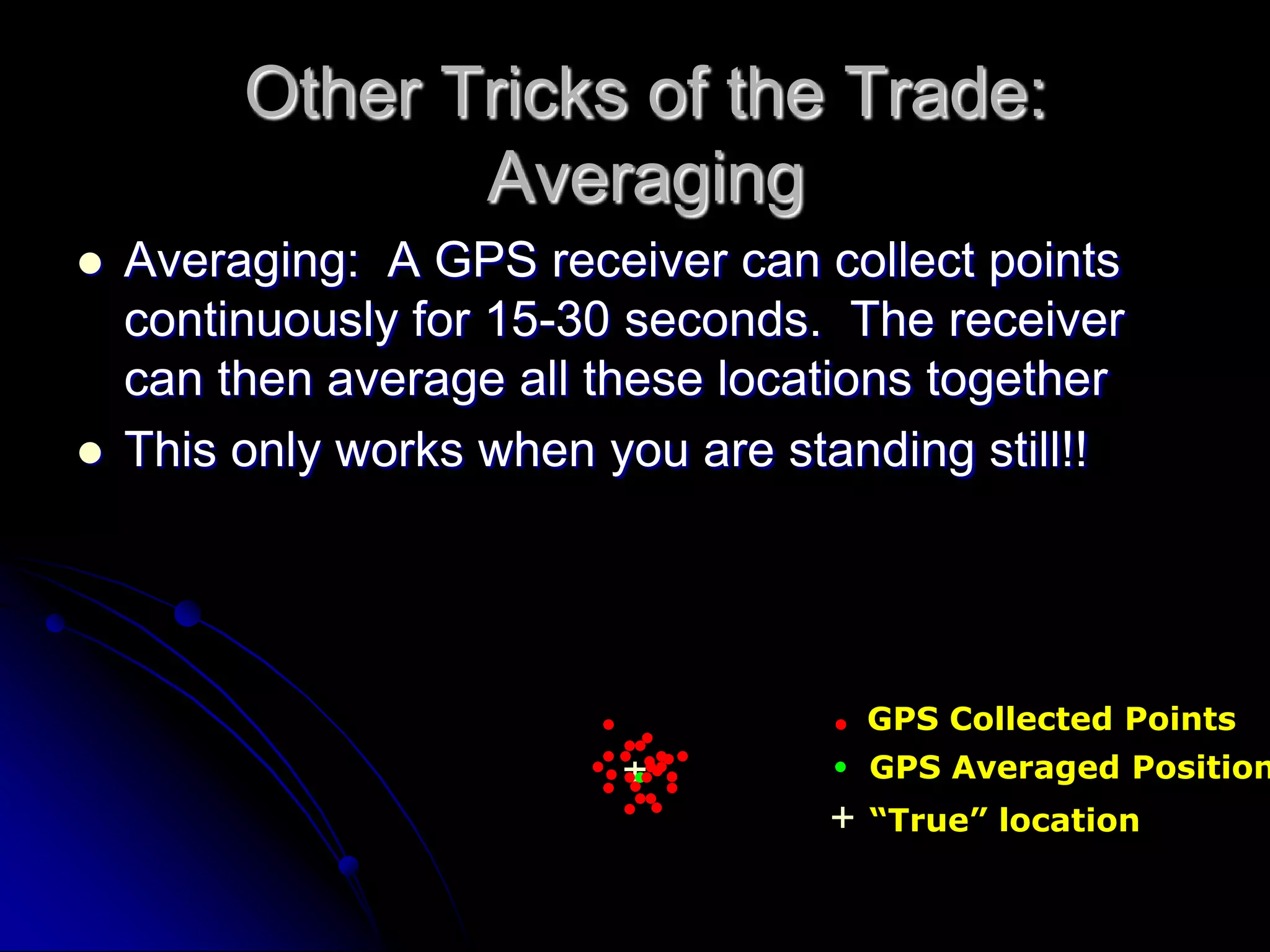
Description of Differential GPS and WAAS, methods for improving accuracy, and receiver technologies.
Description of Differential GPS and WAAS, methods for improving accuracy, and receiver technologies.
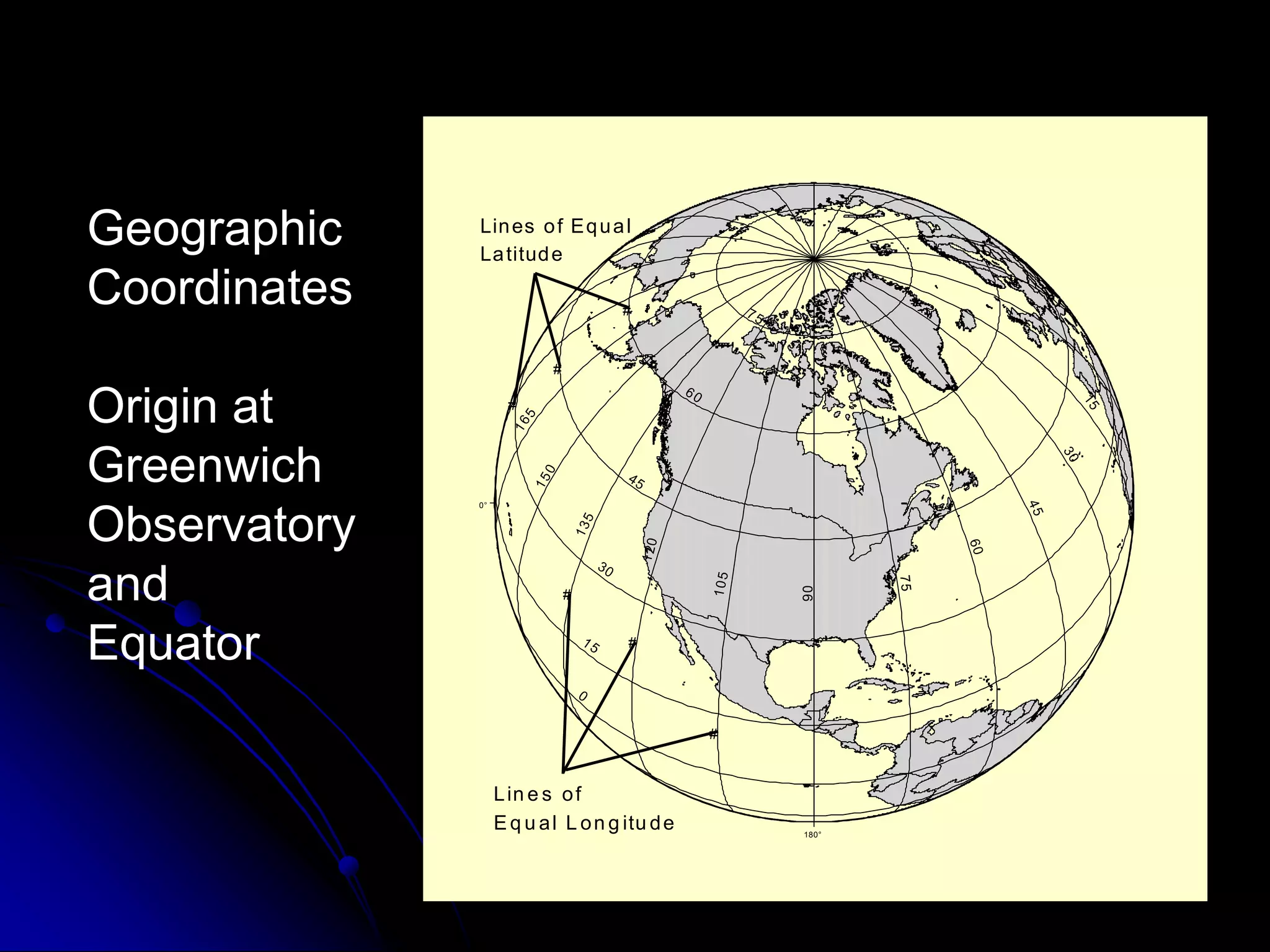
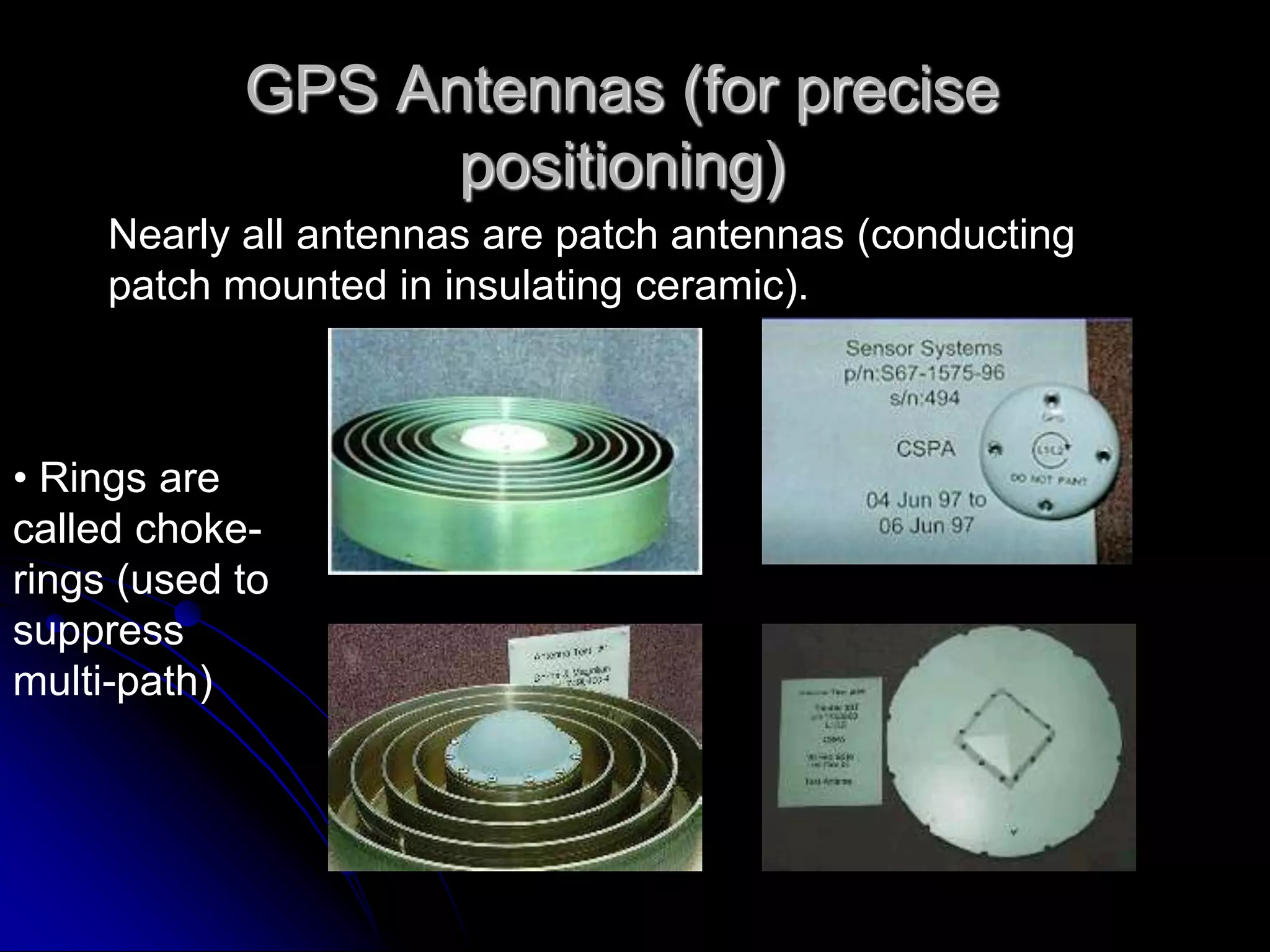
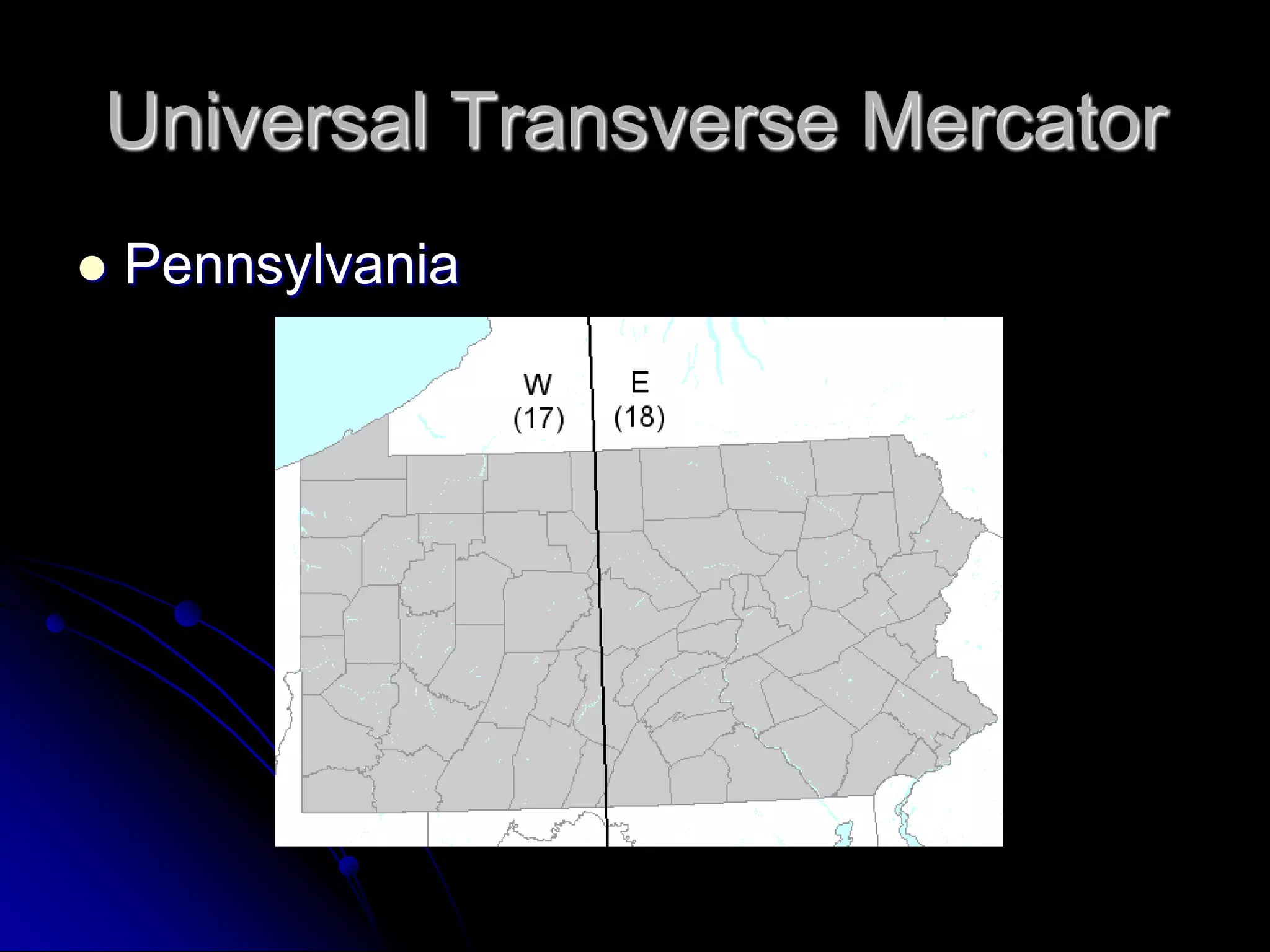
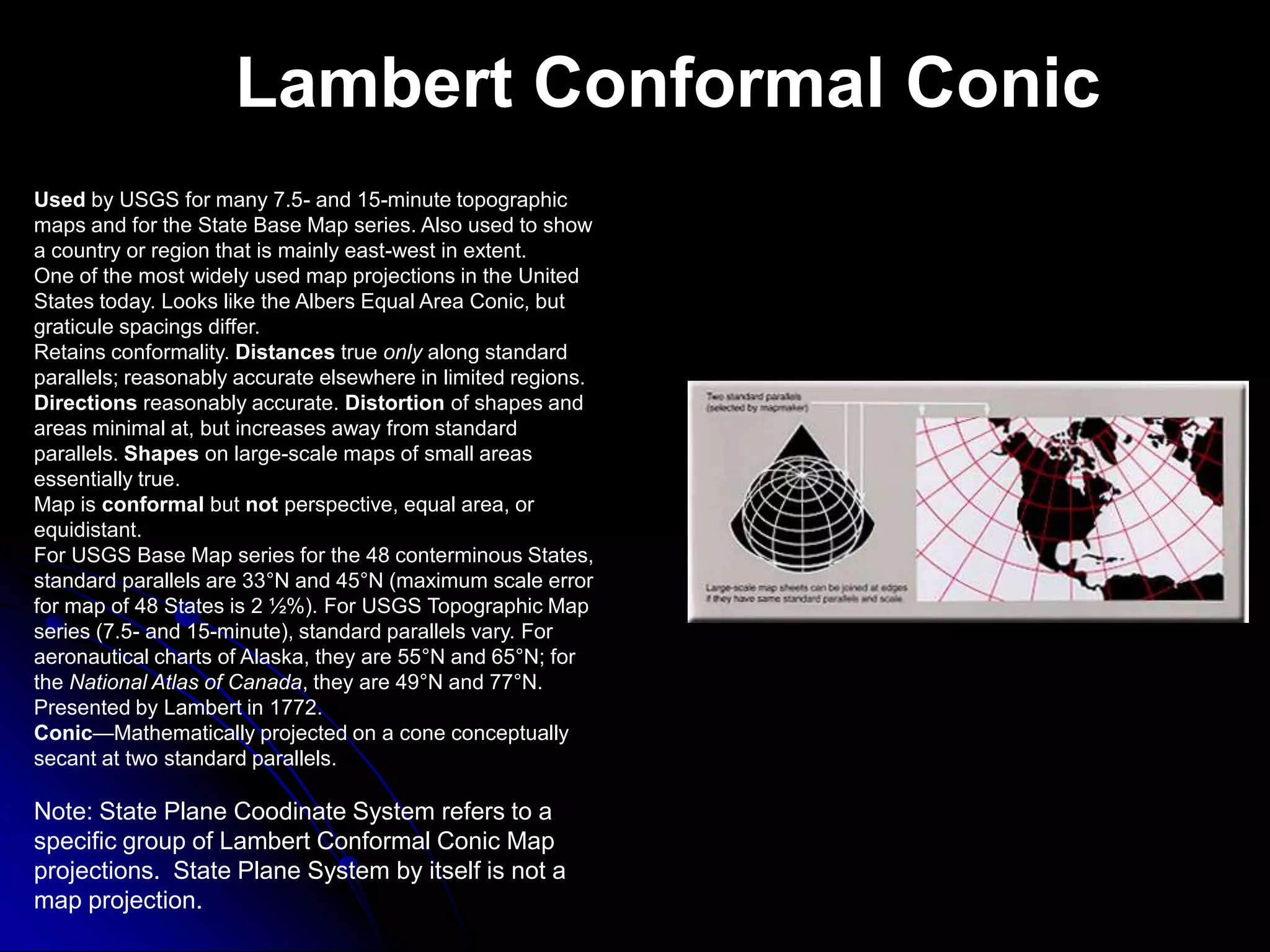
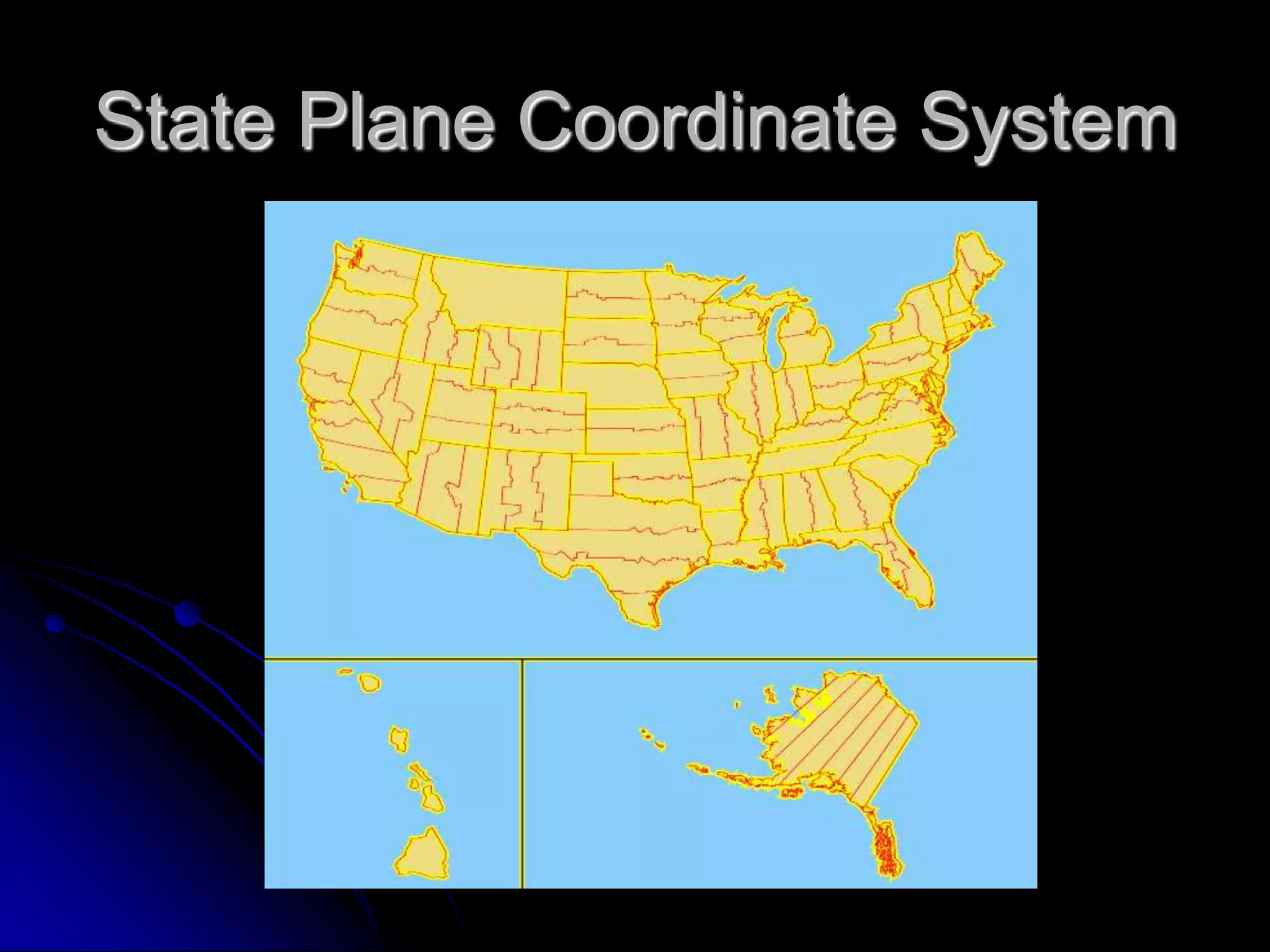
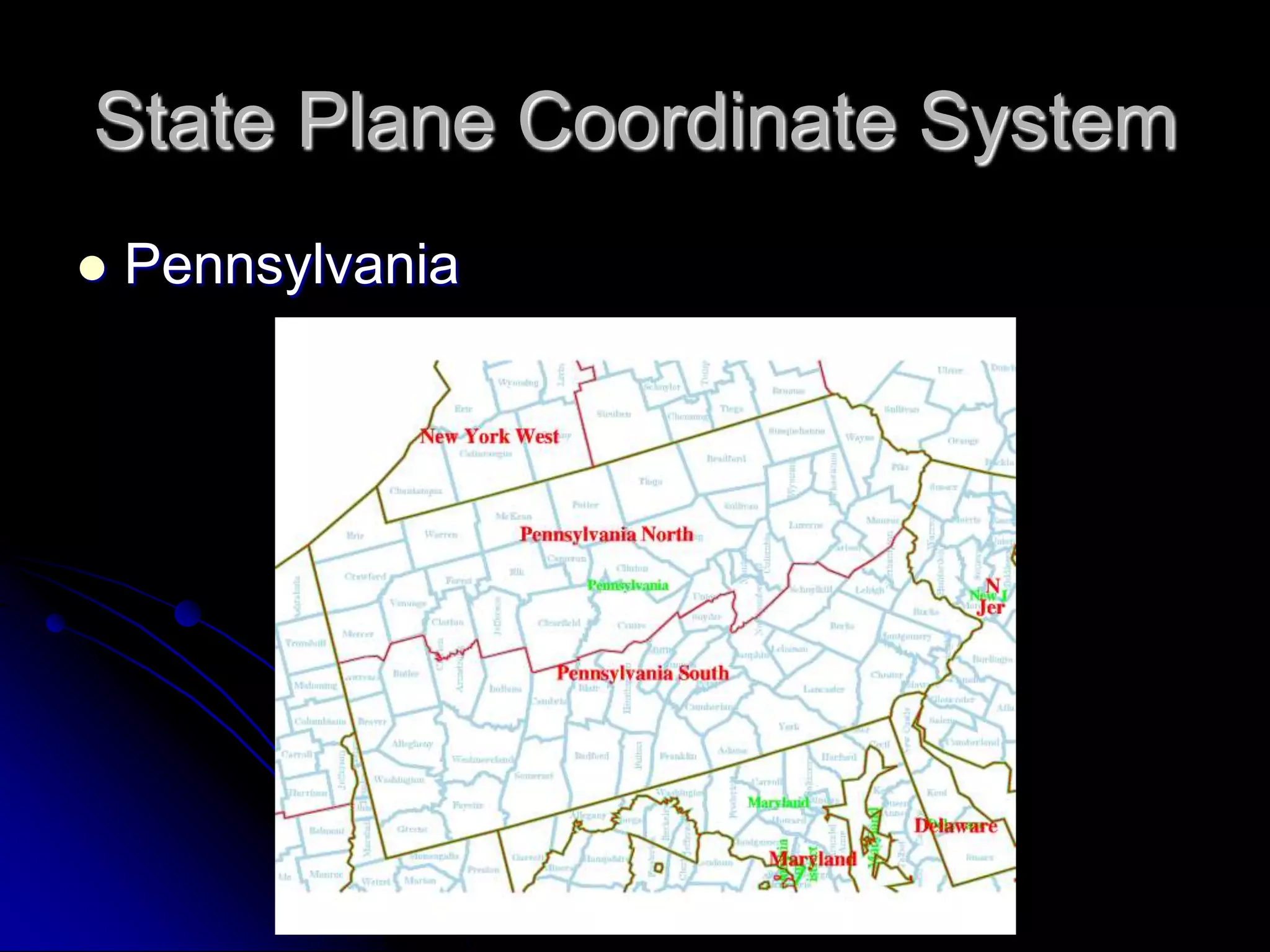
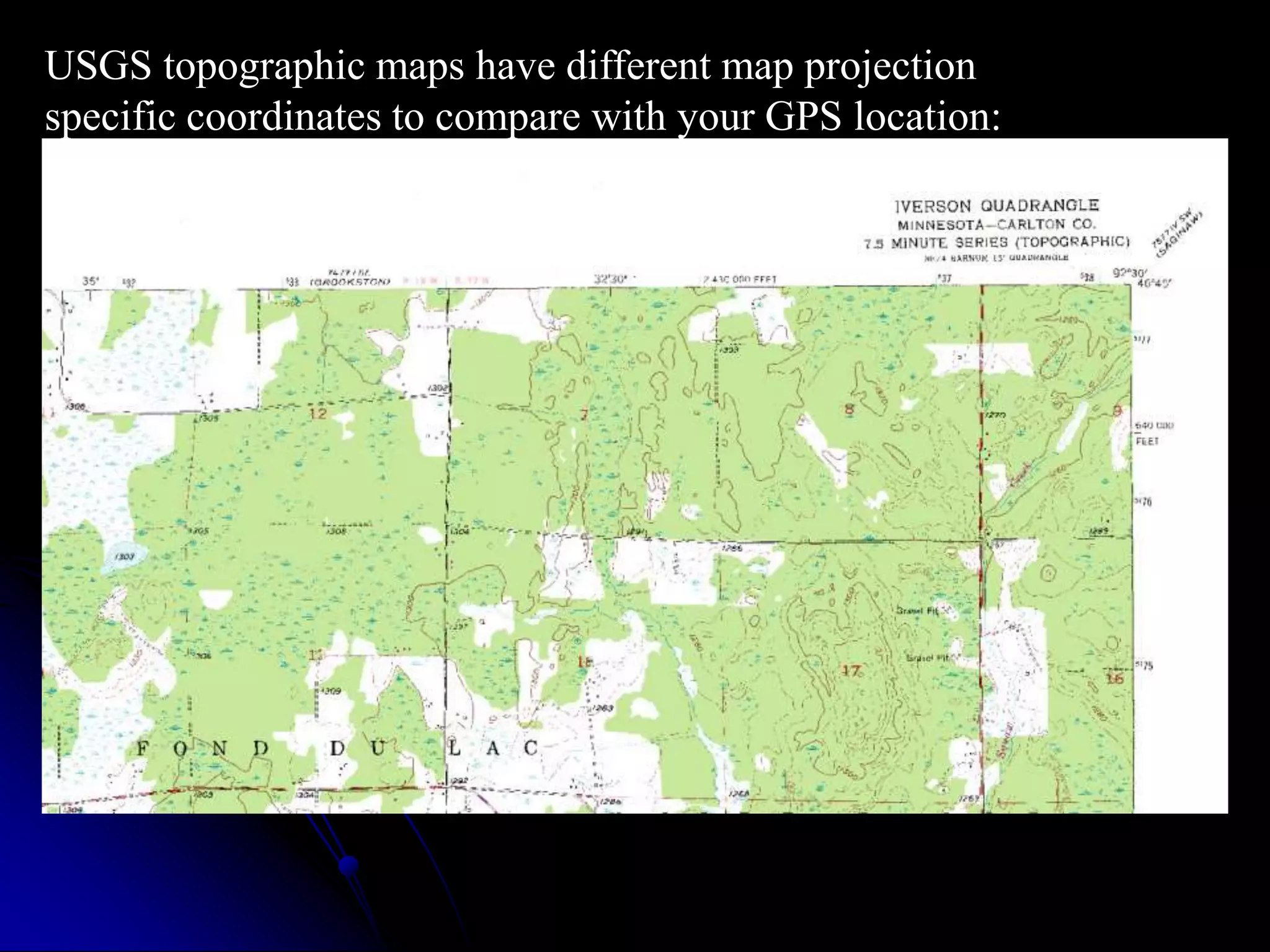
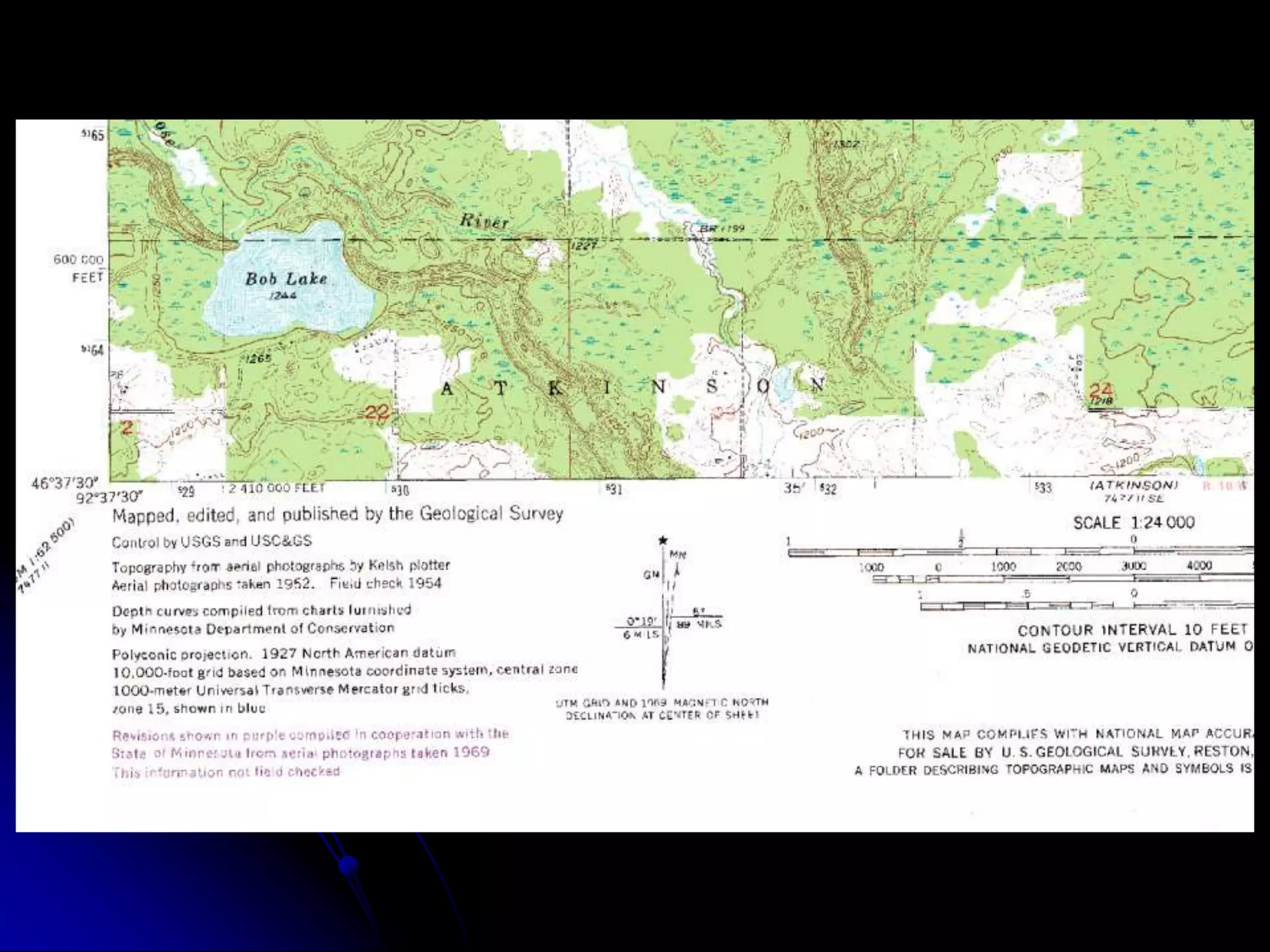
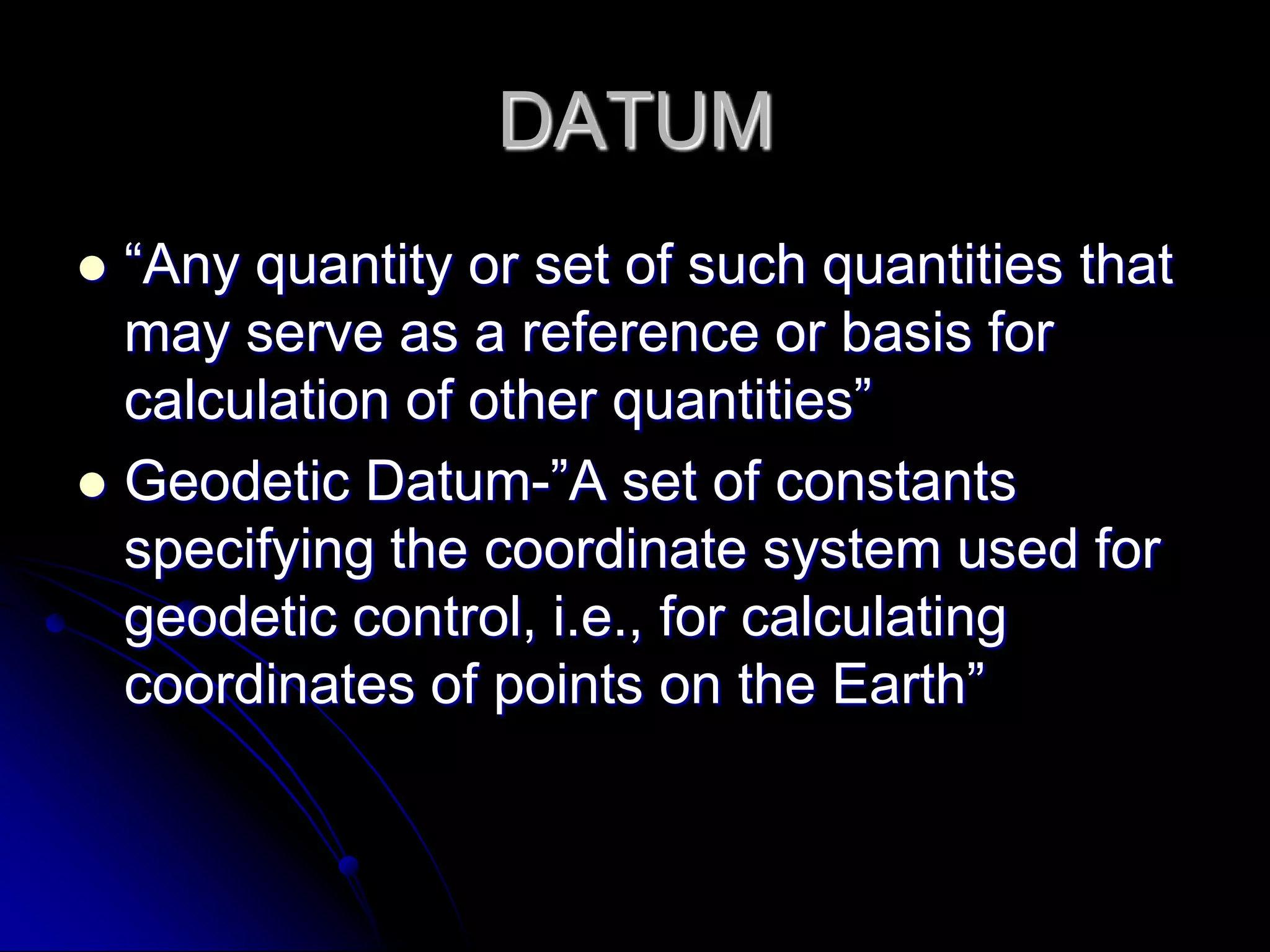
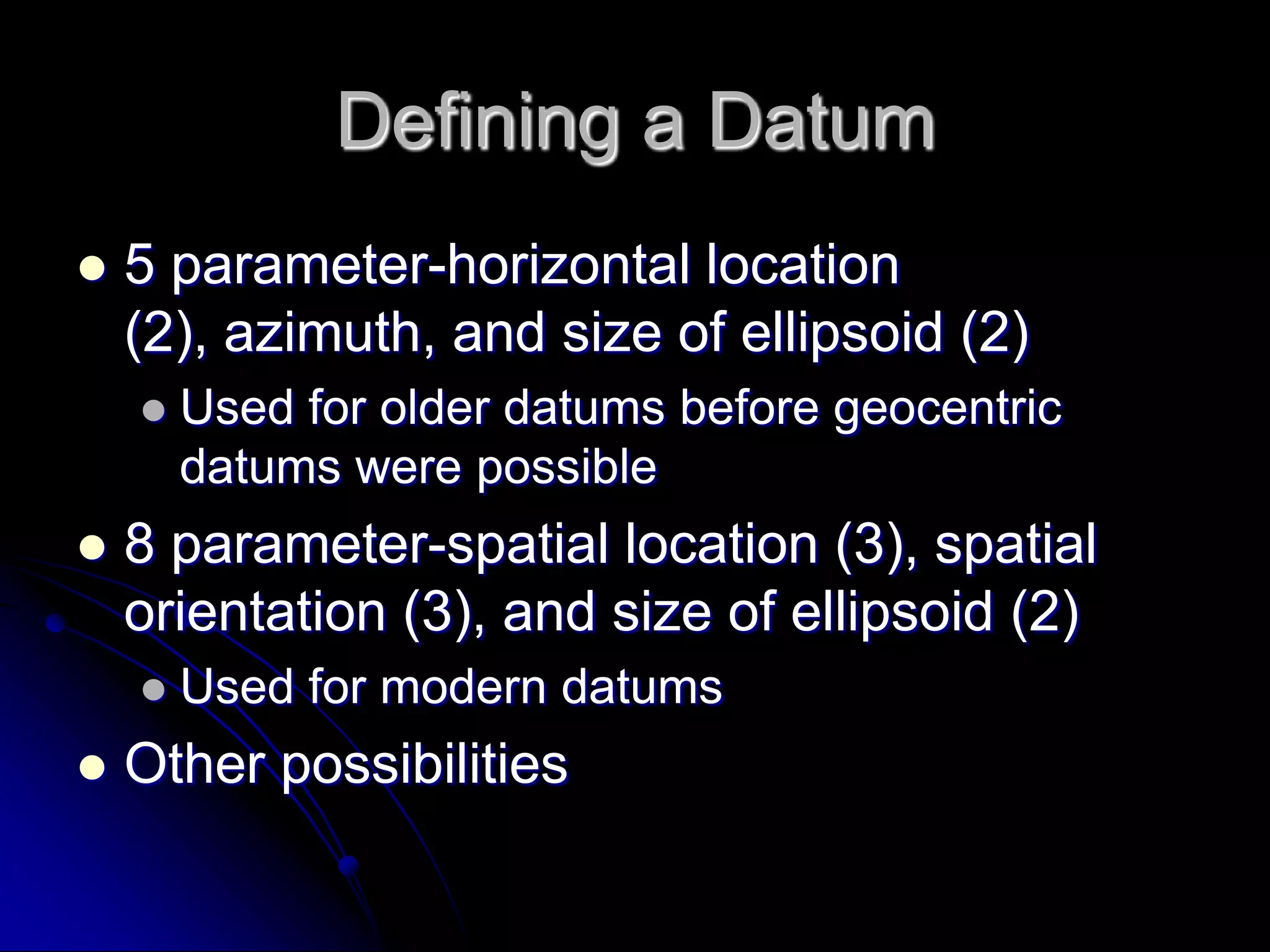
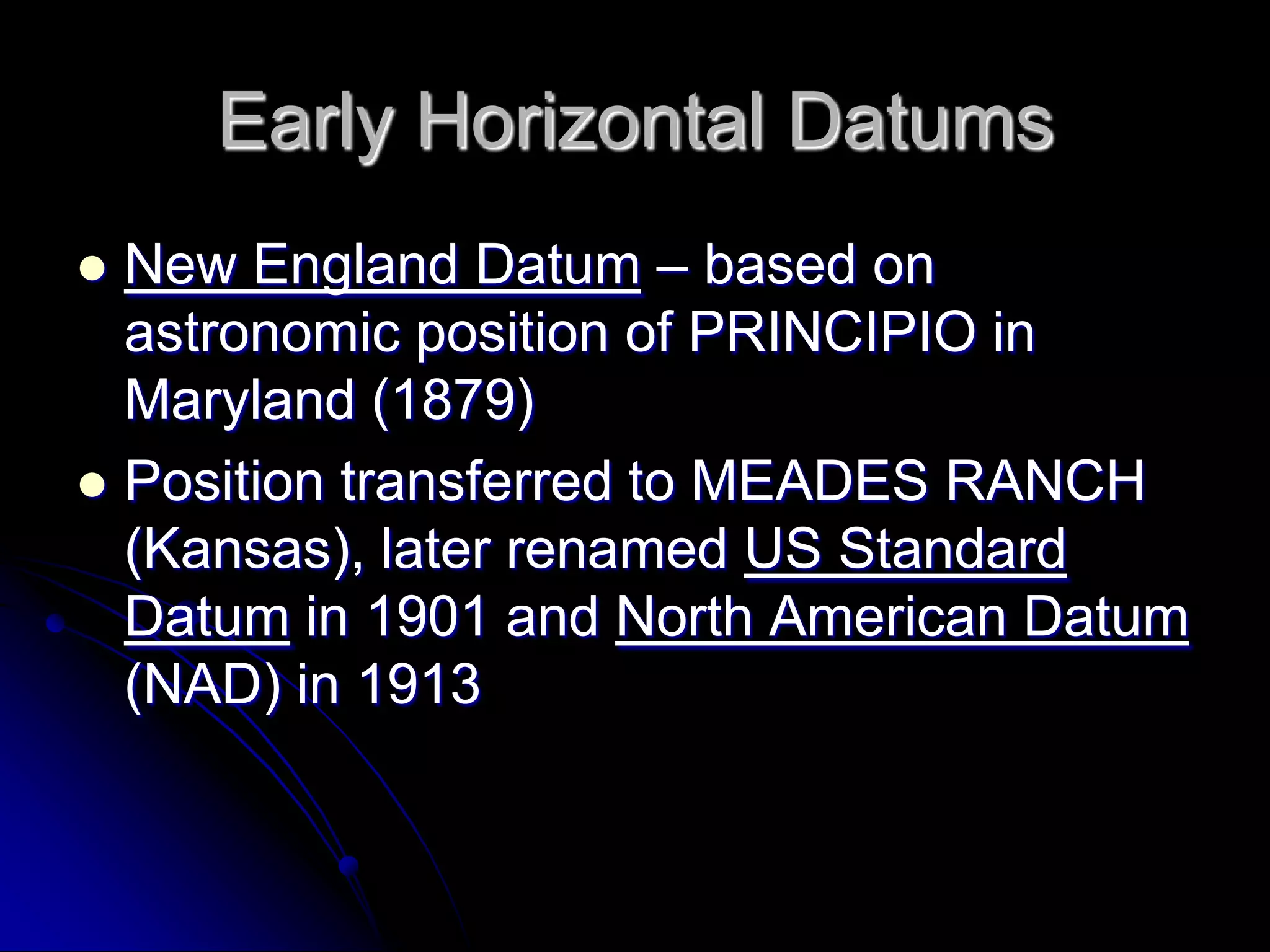
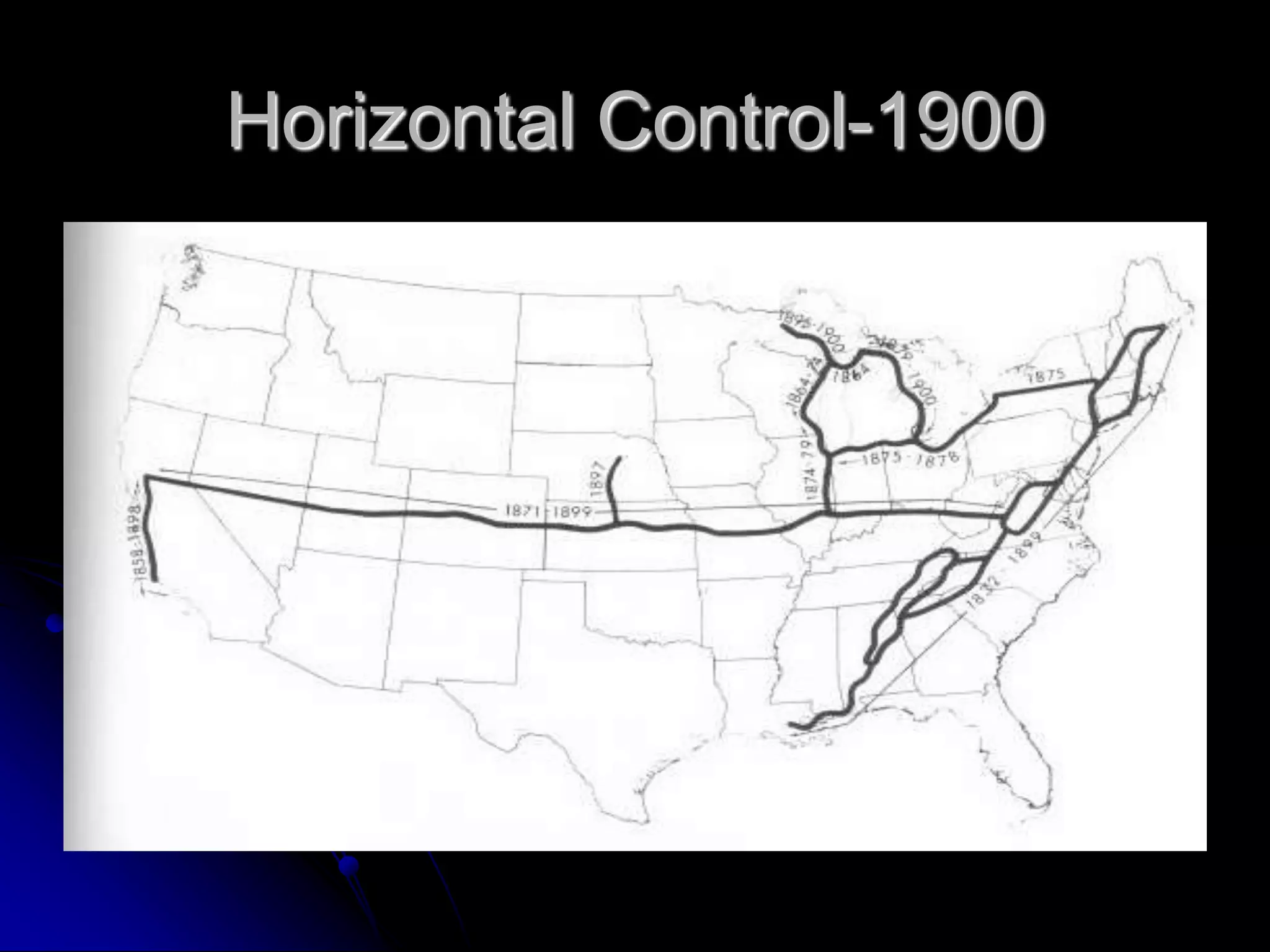
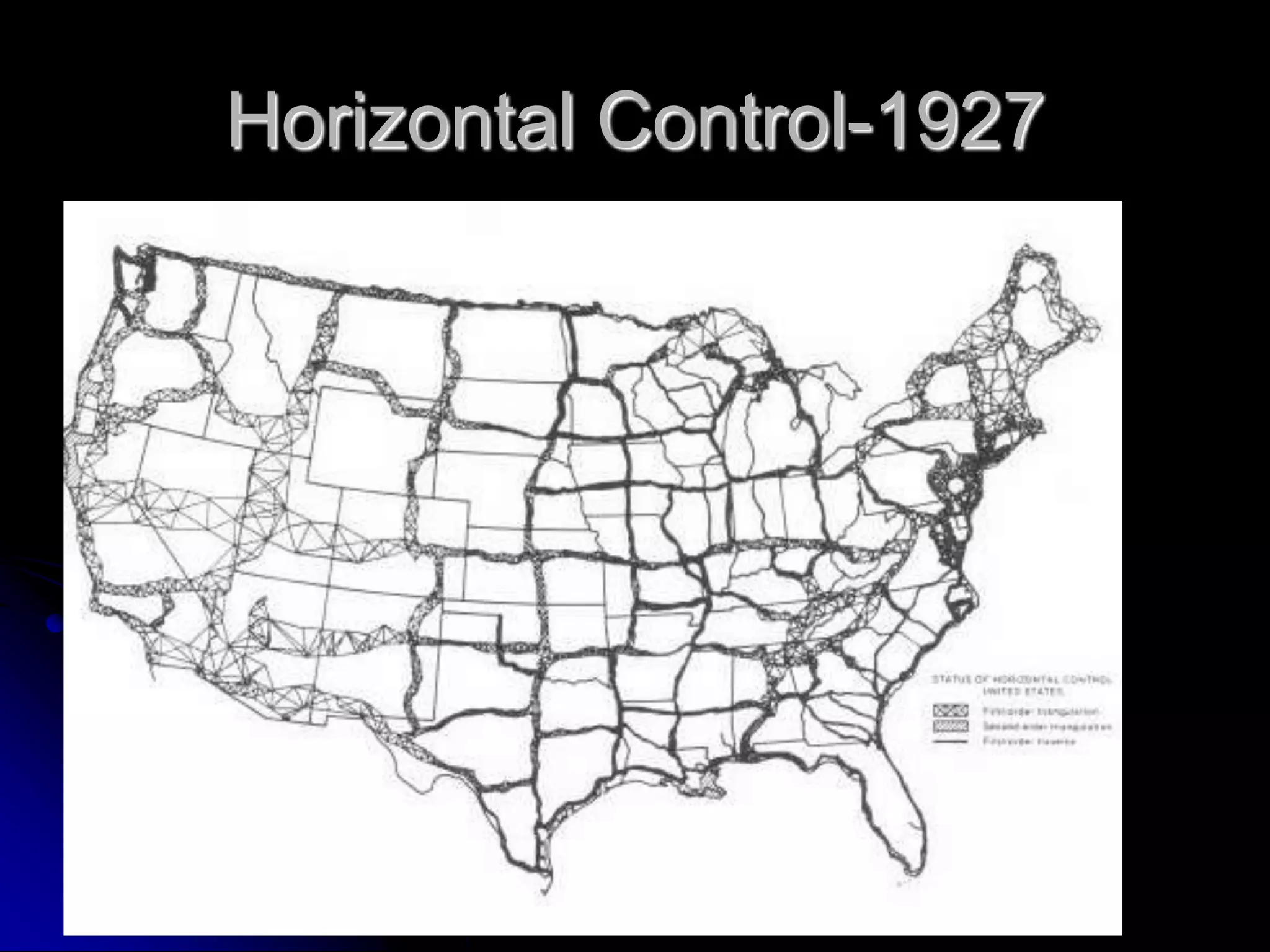
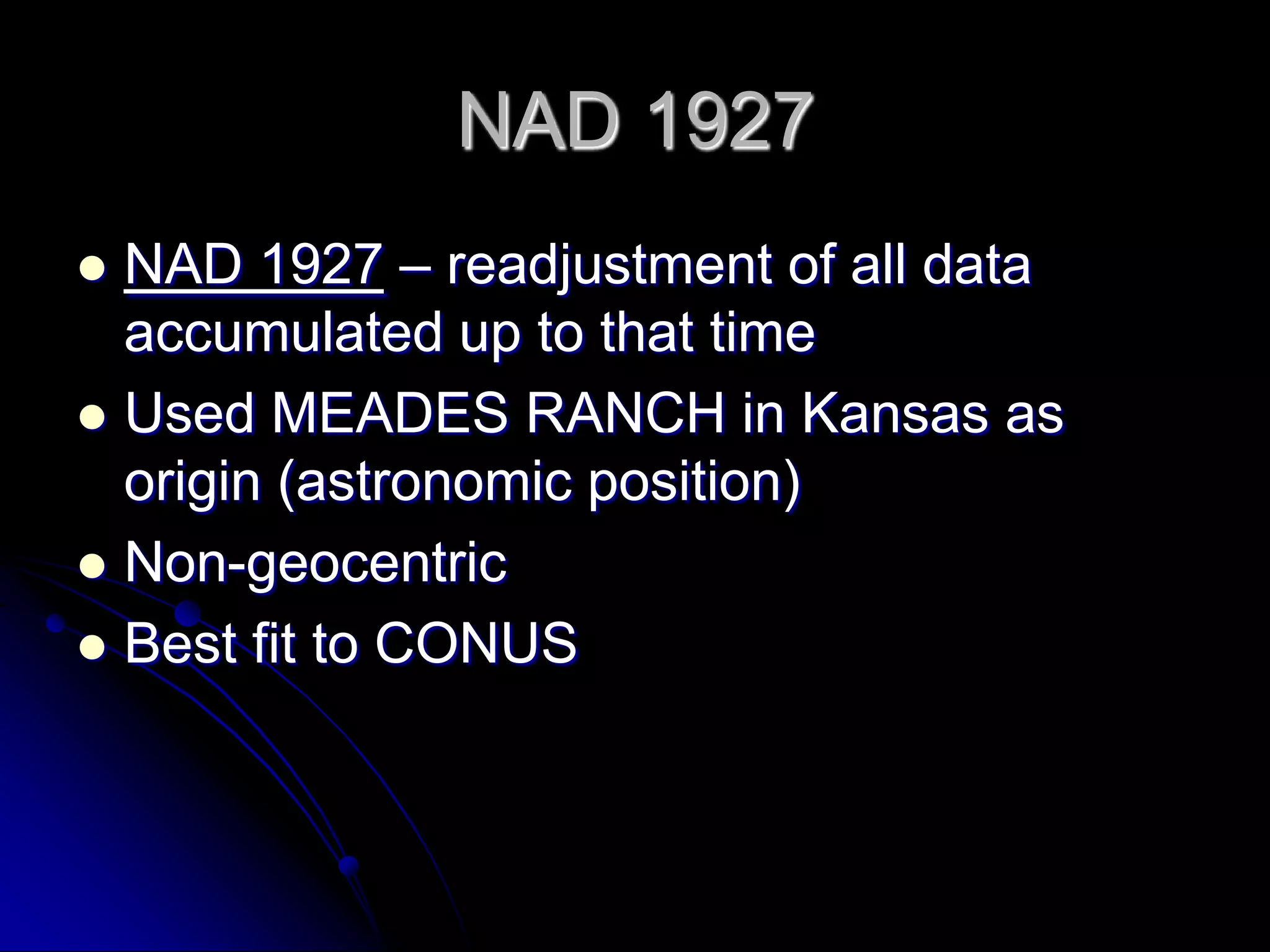
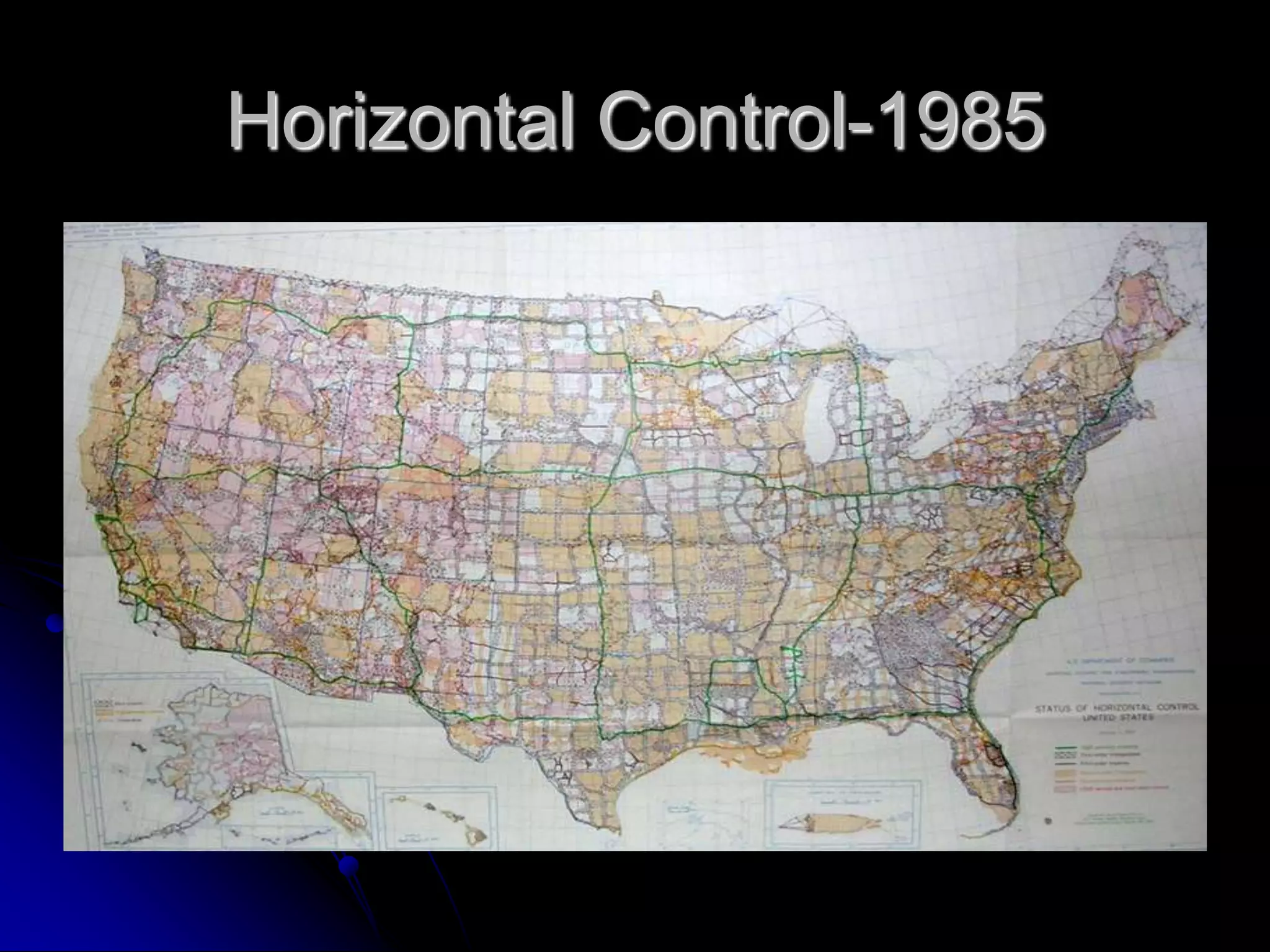
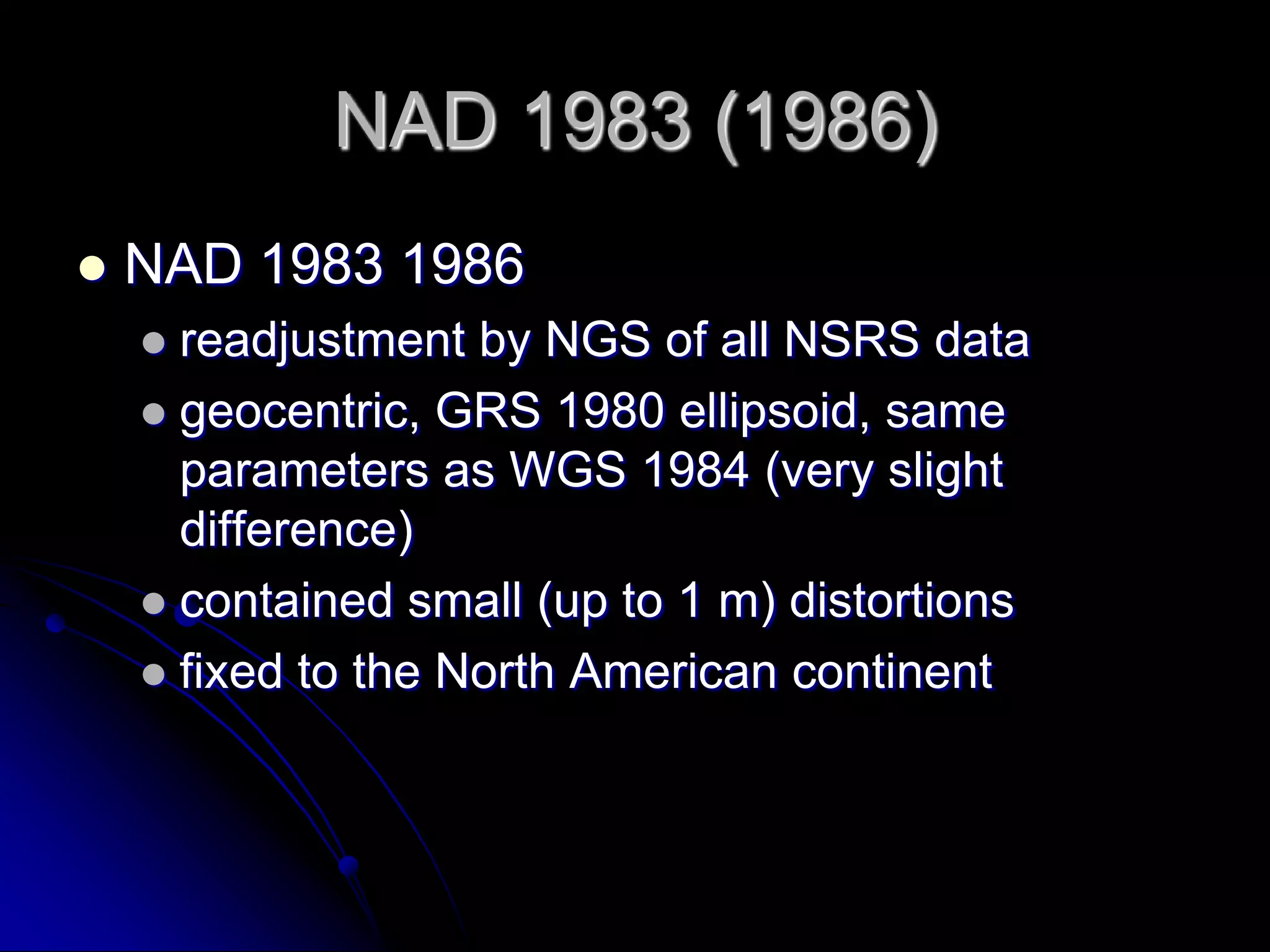
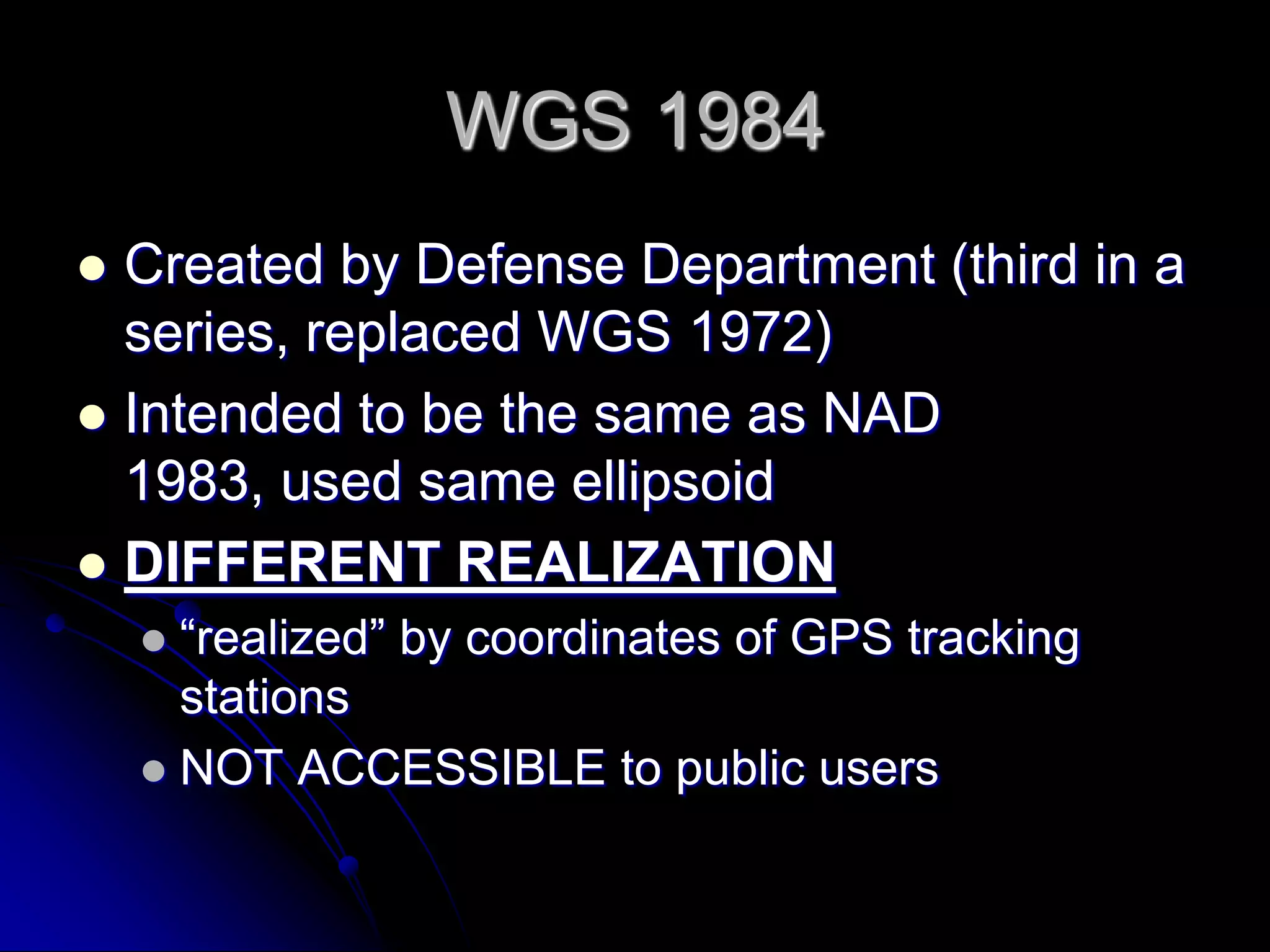
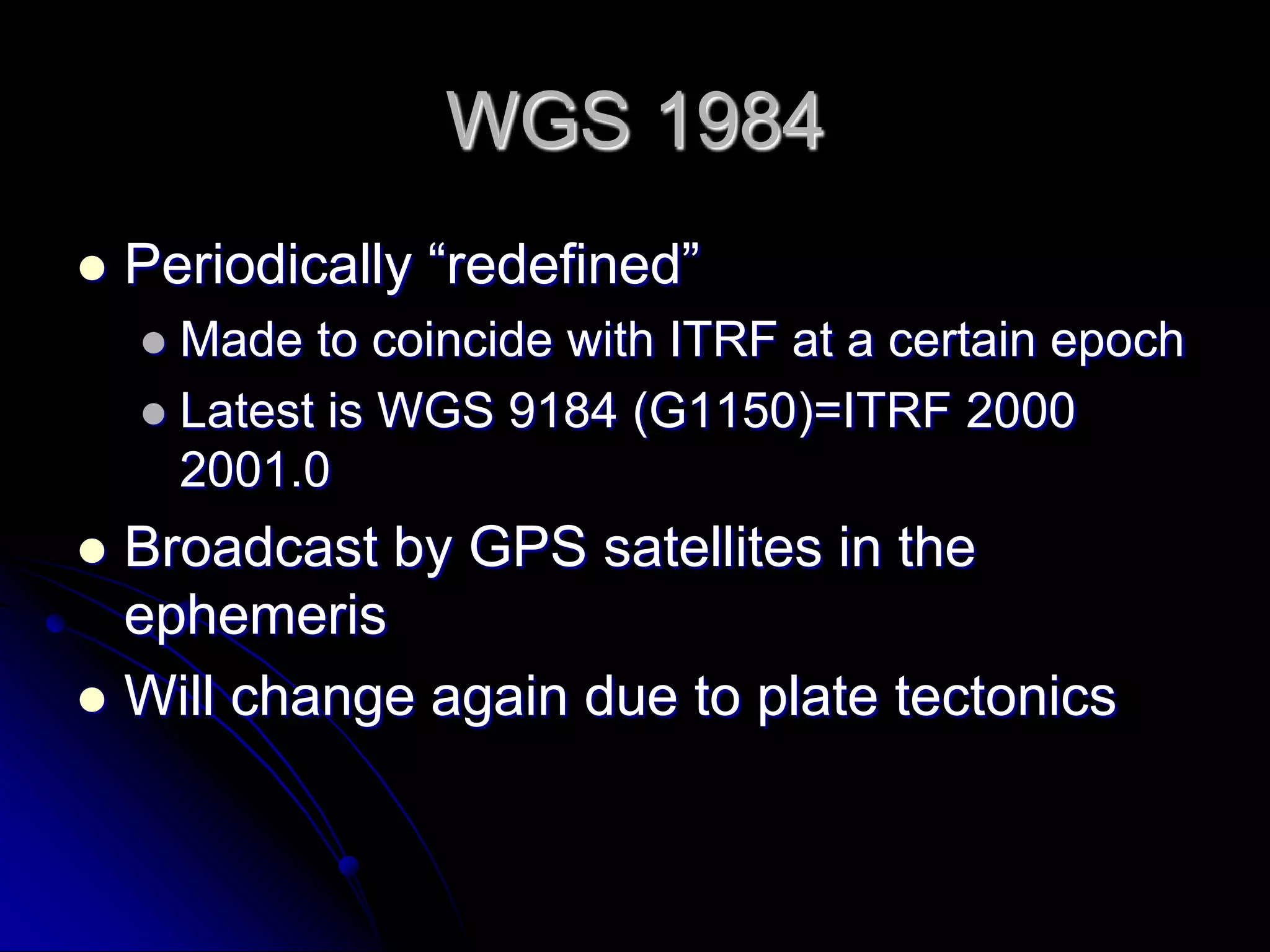
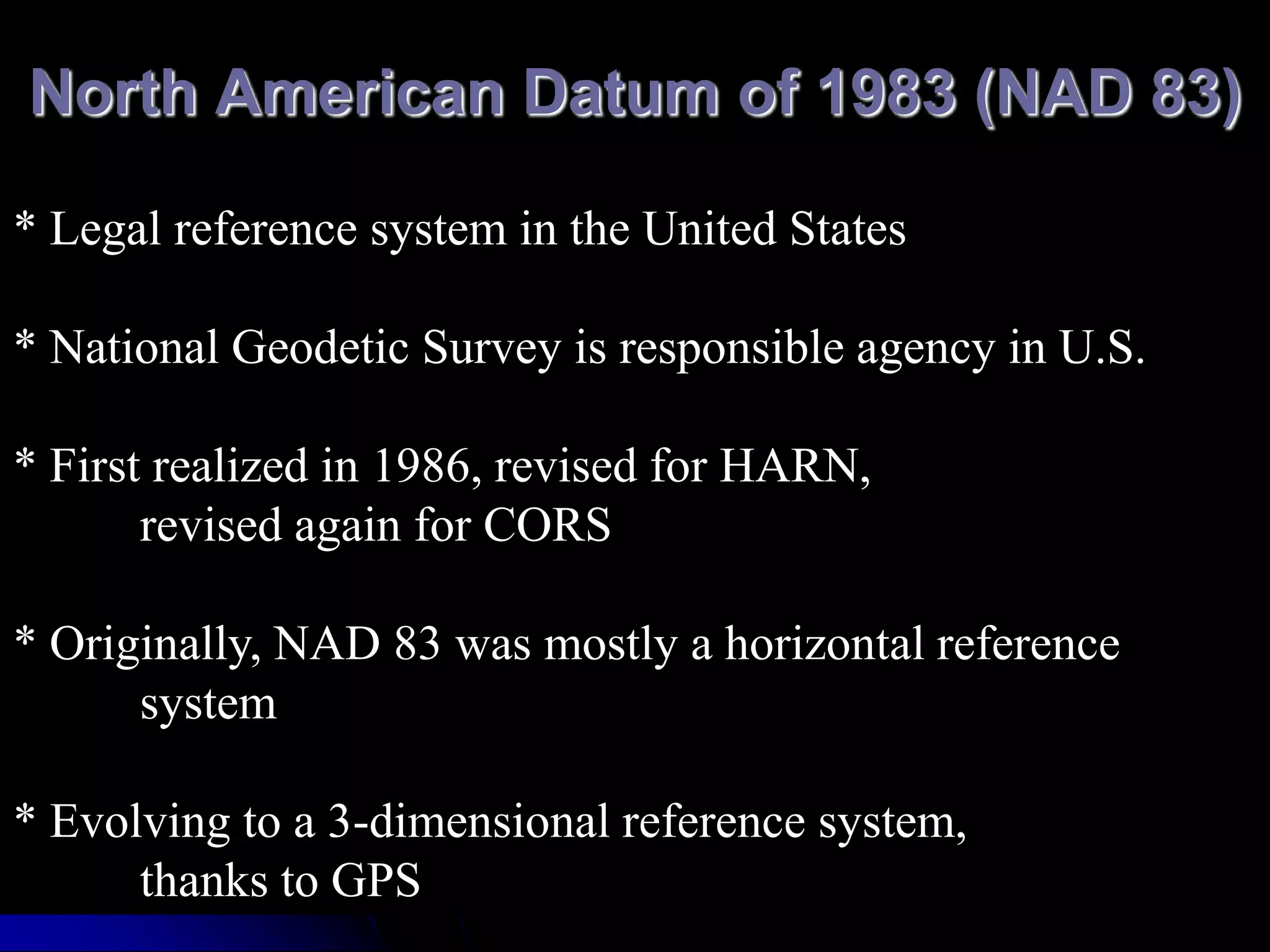
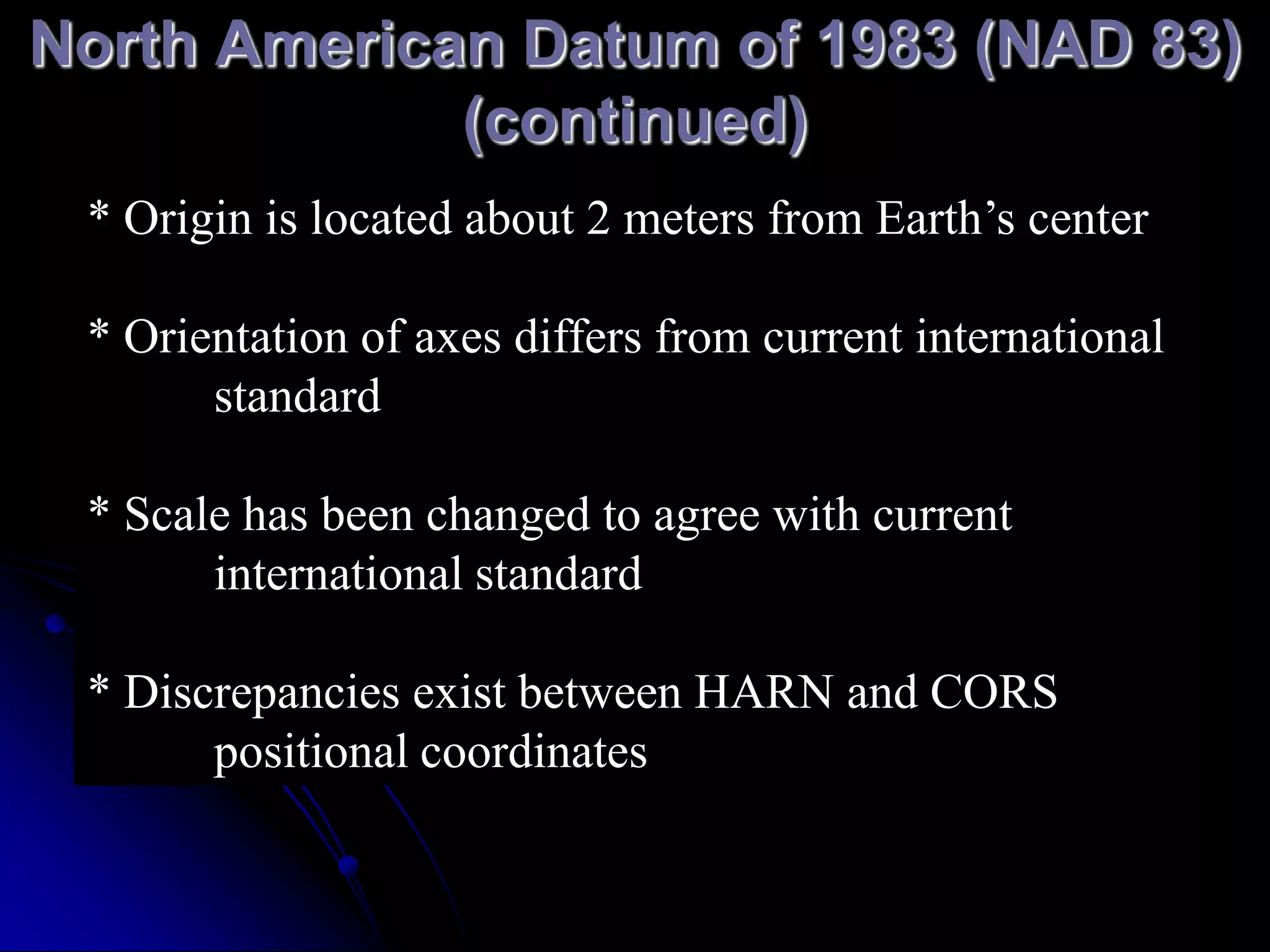
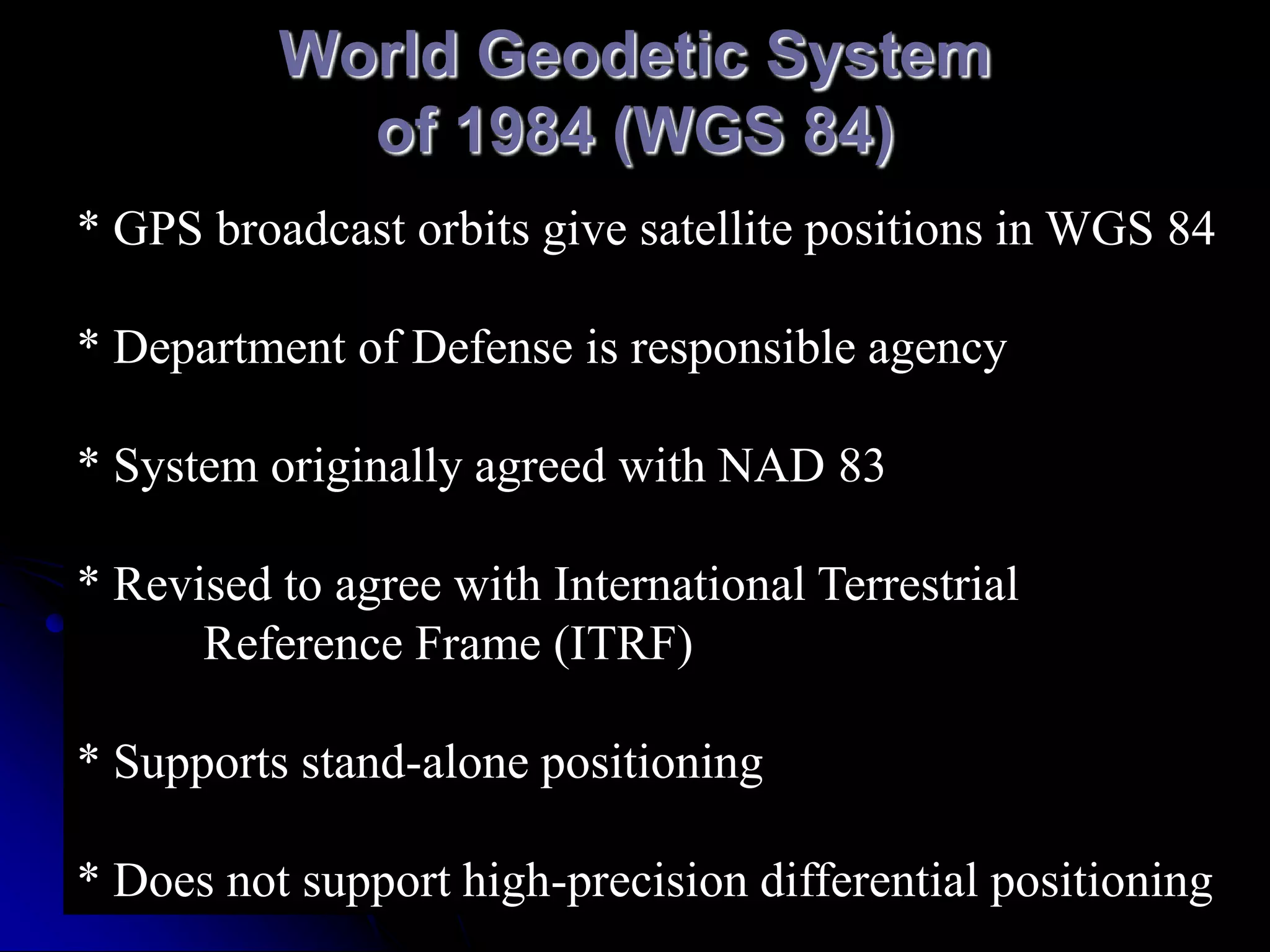
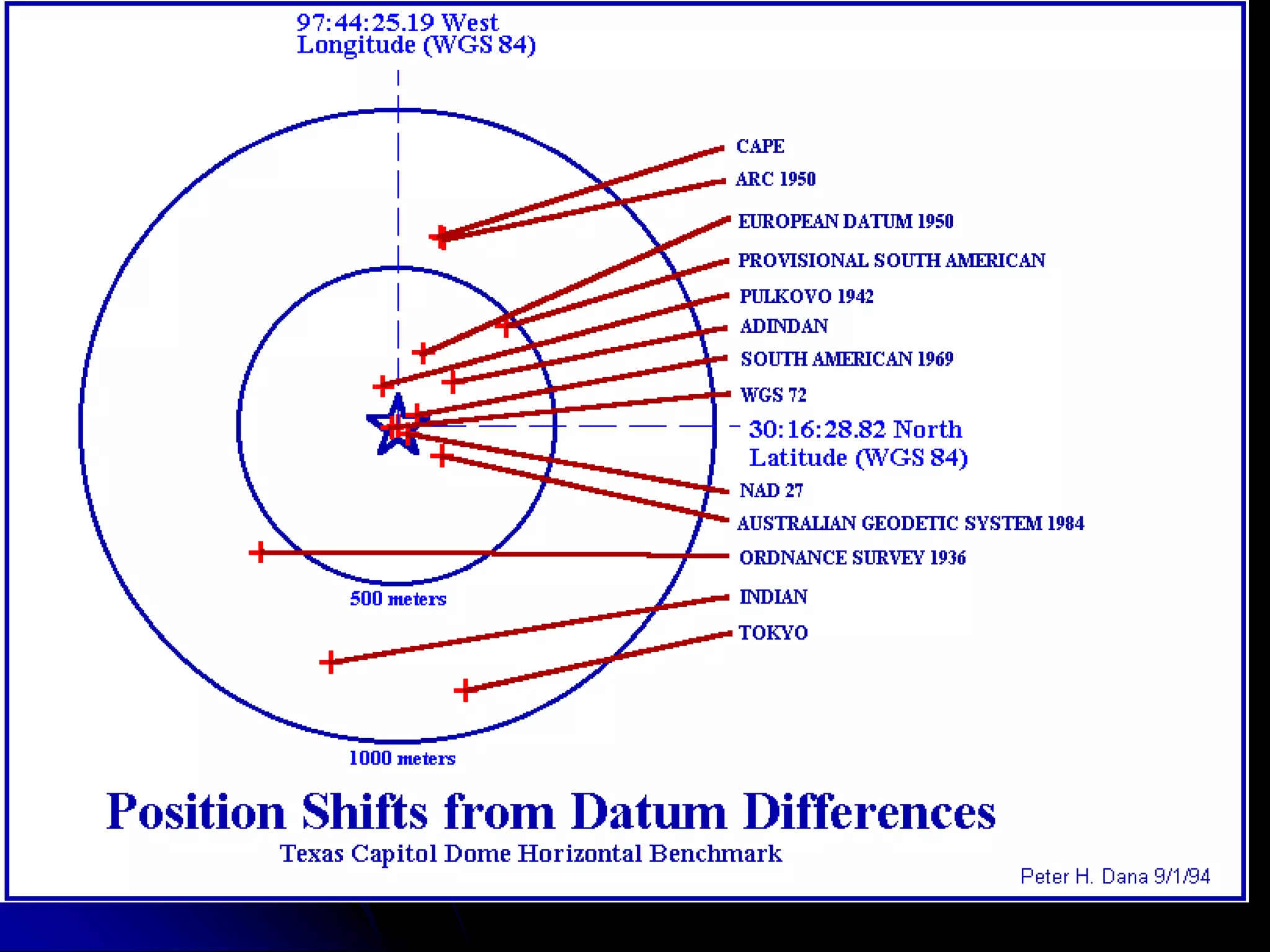
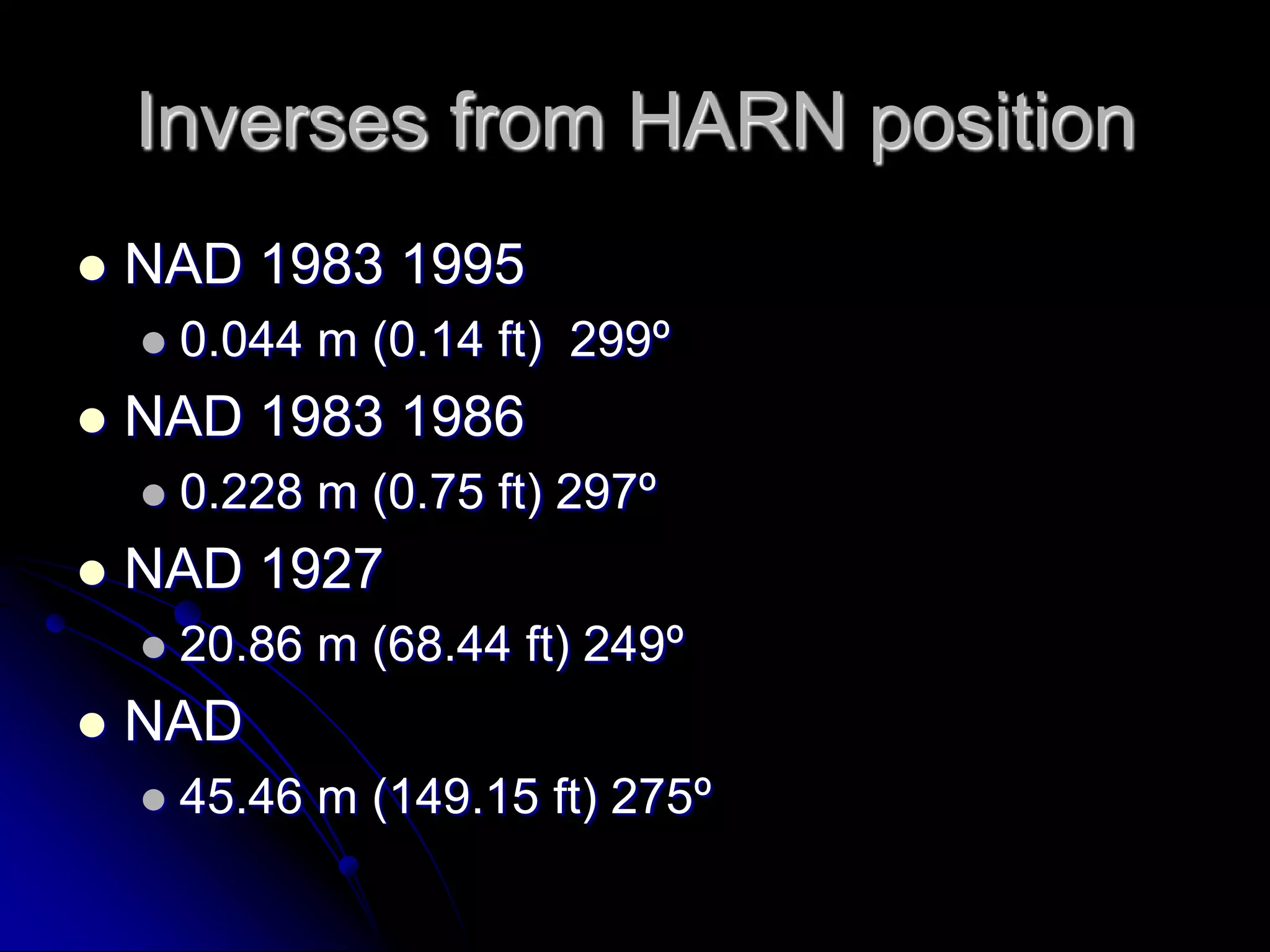
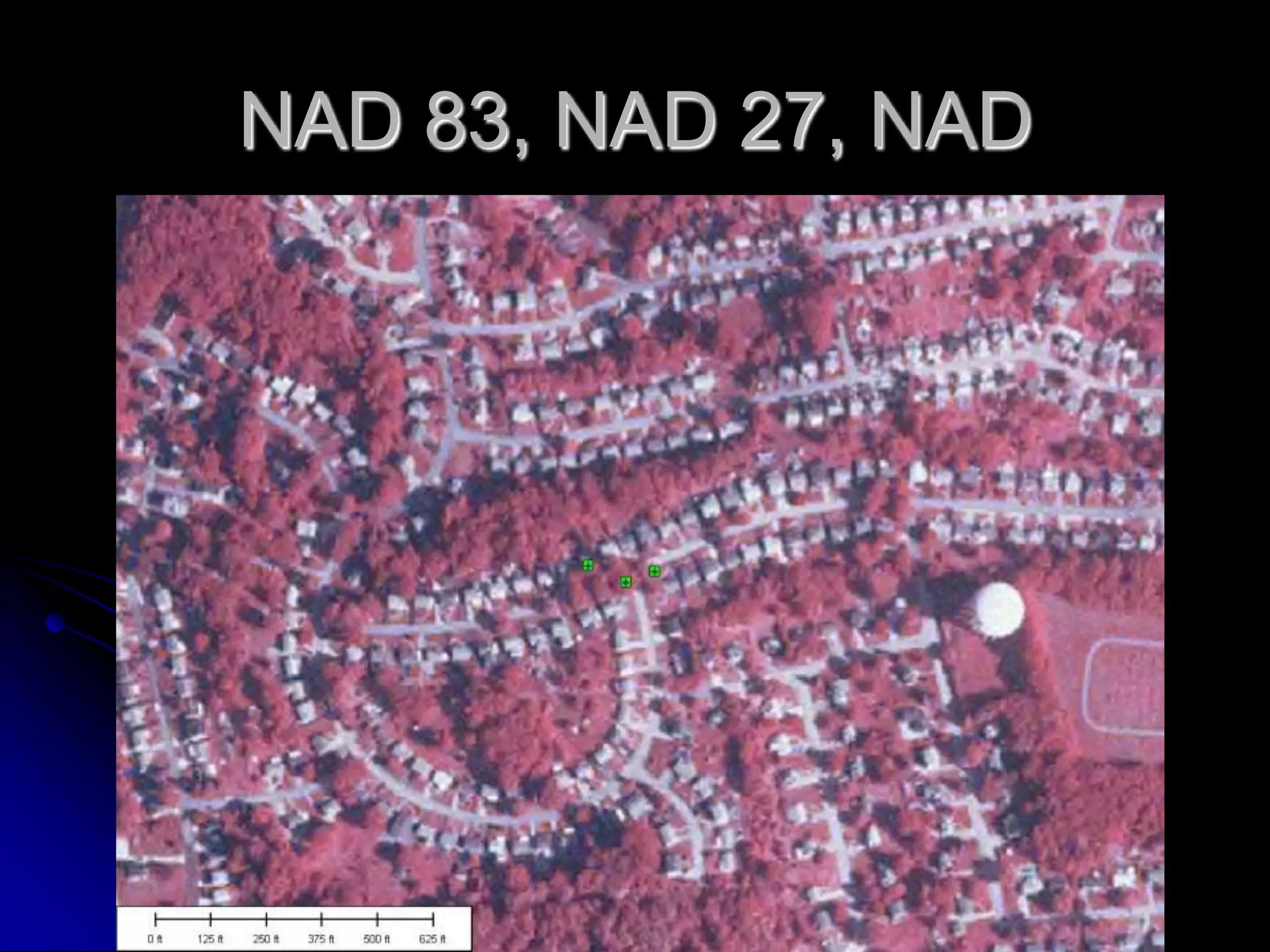
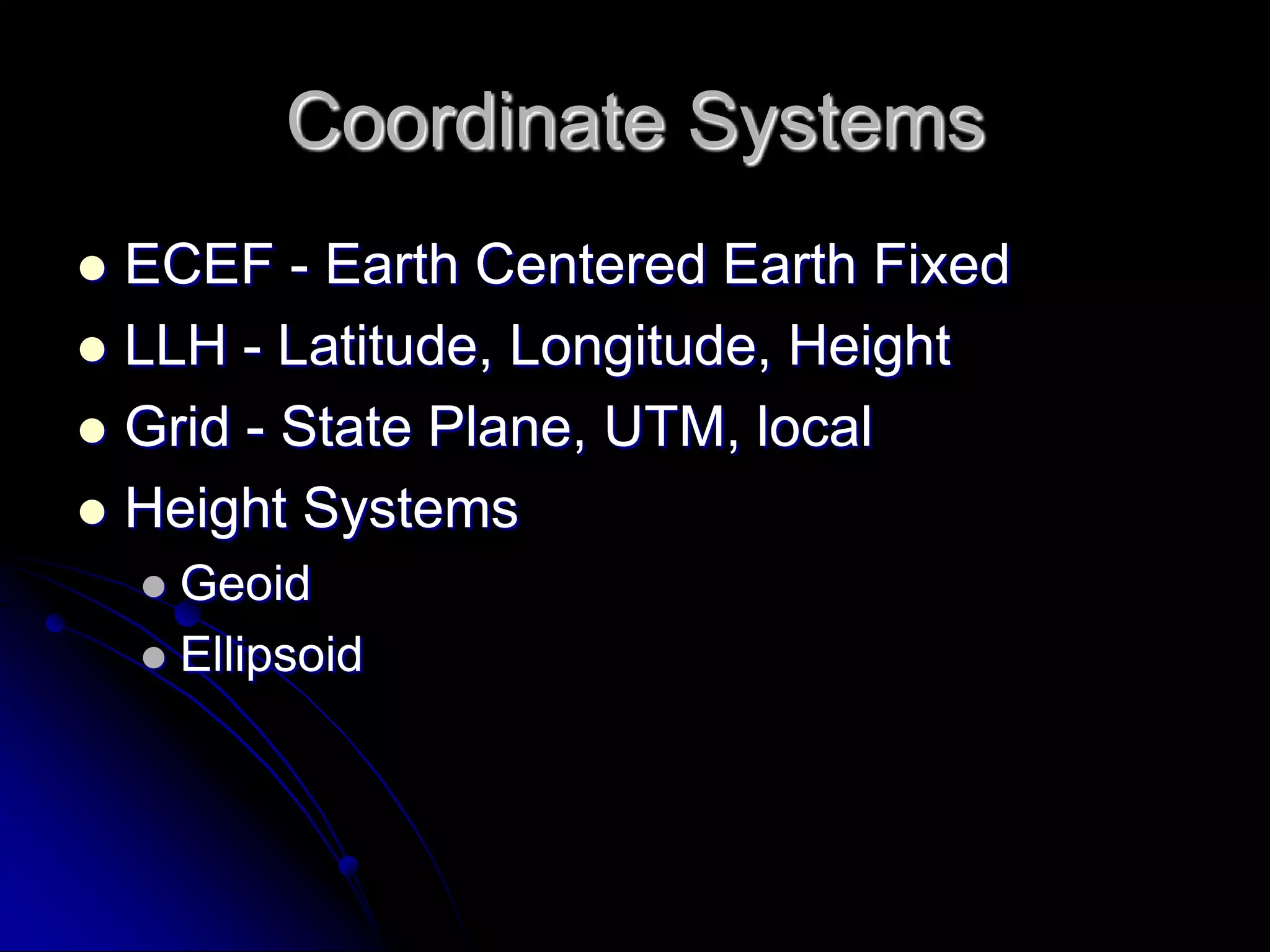
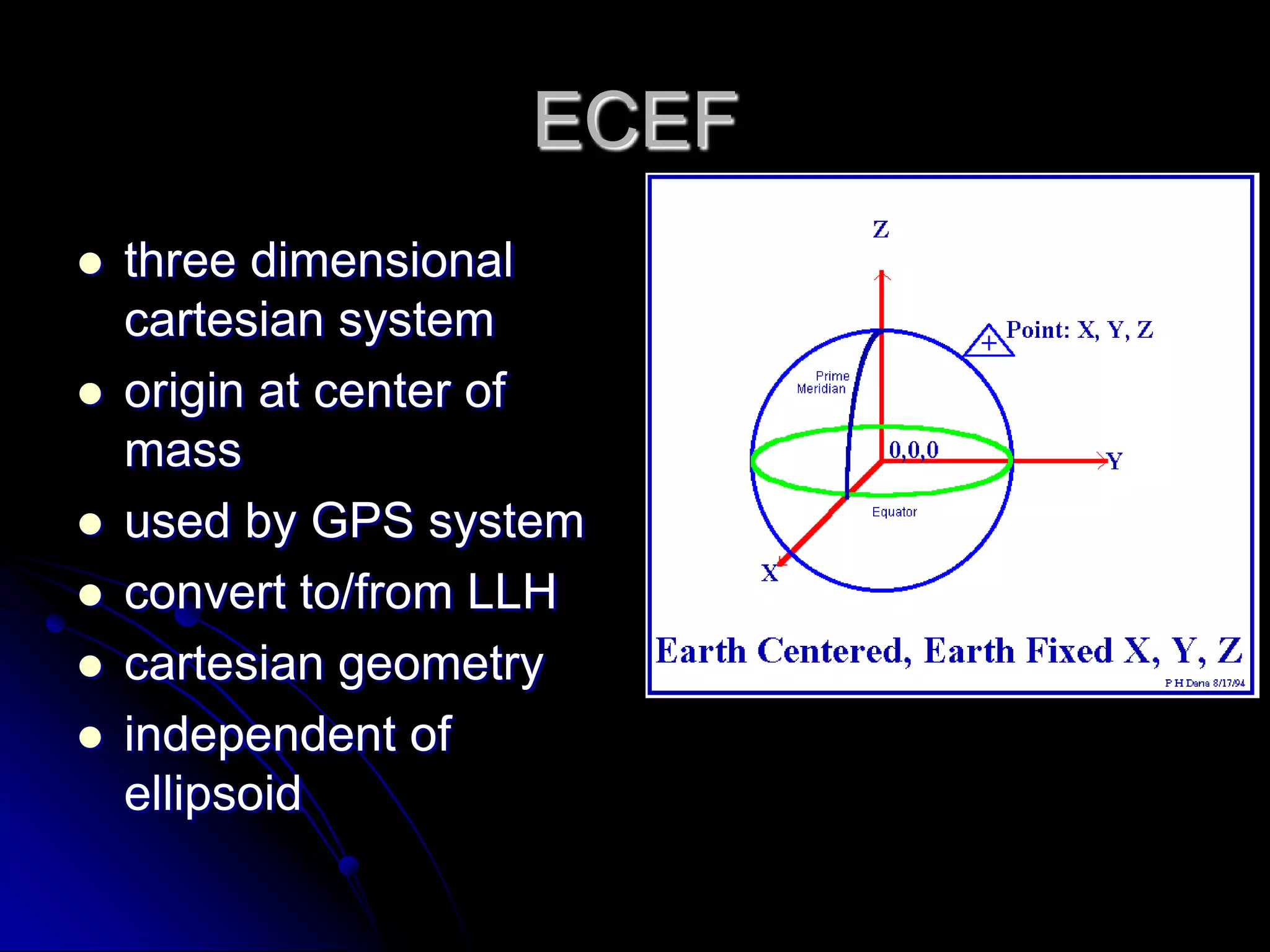
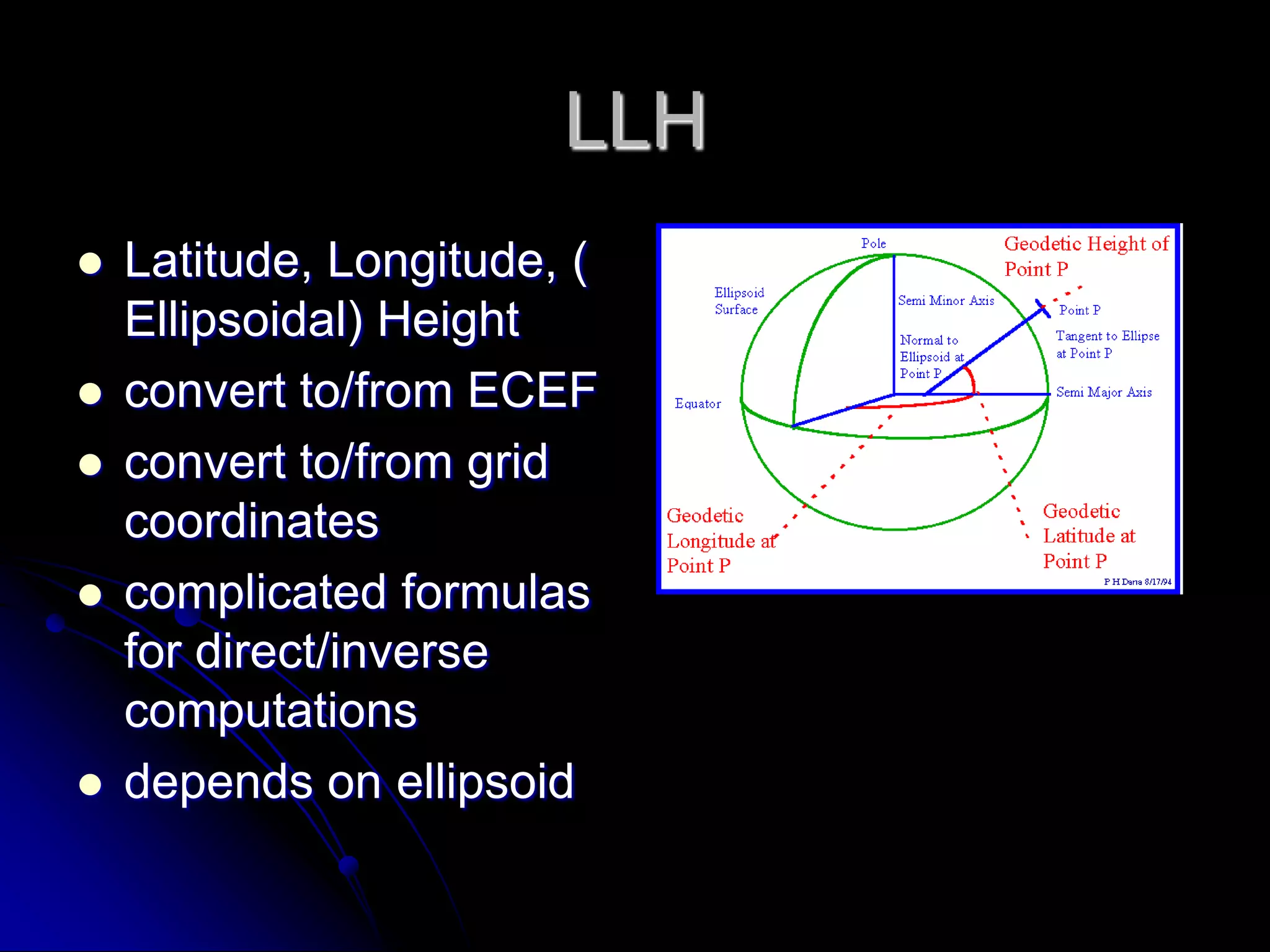
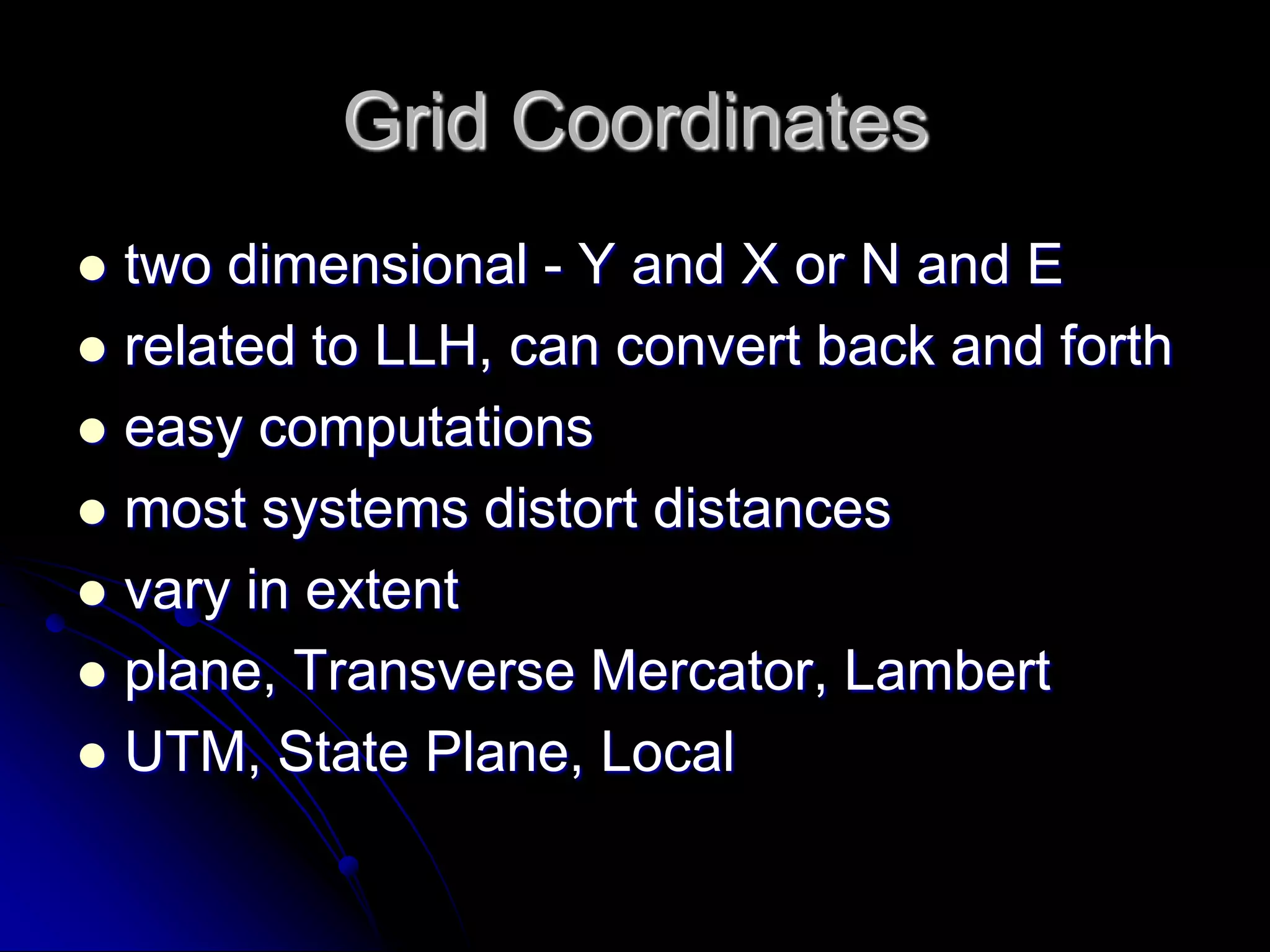
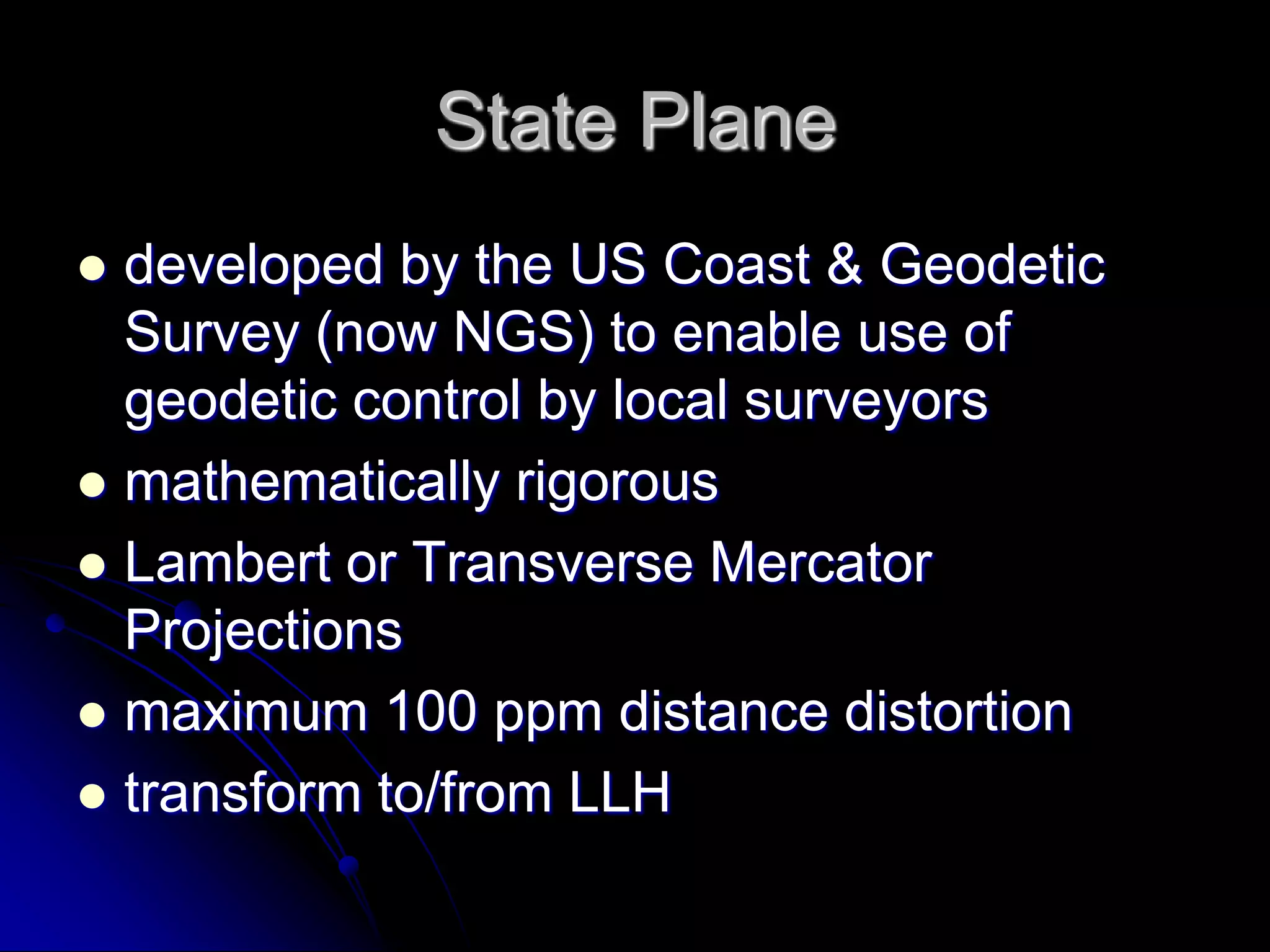
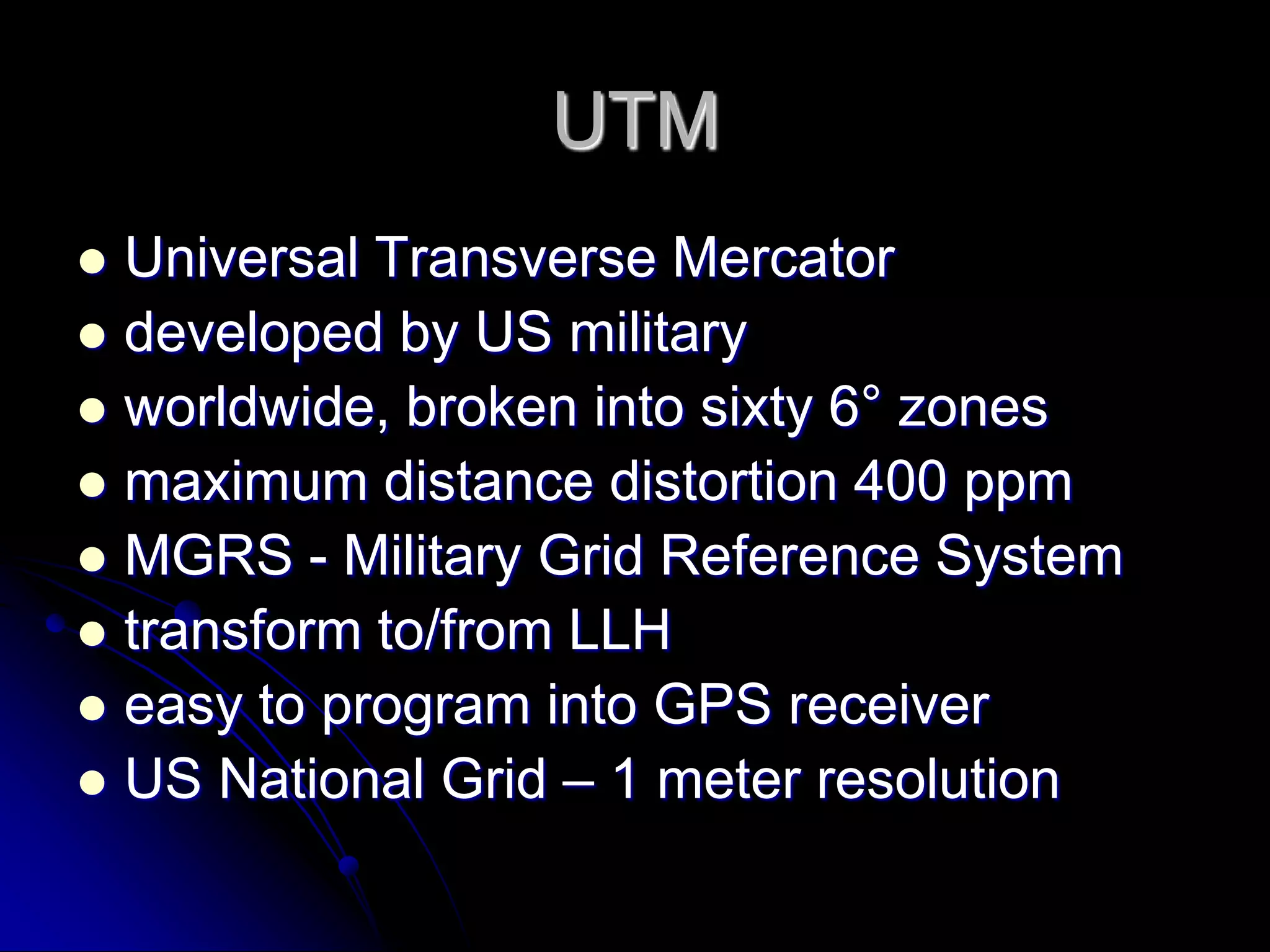
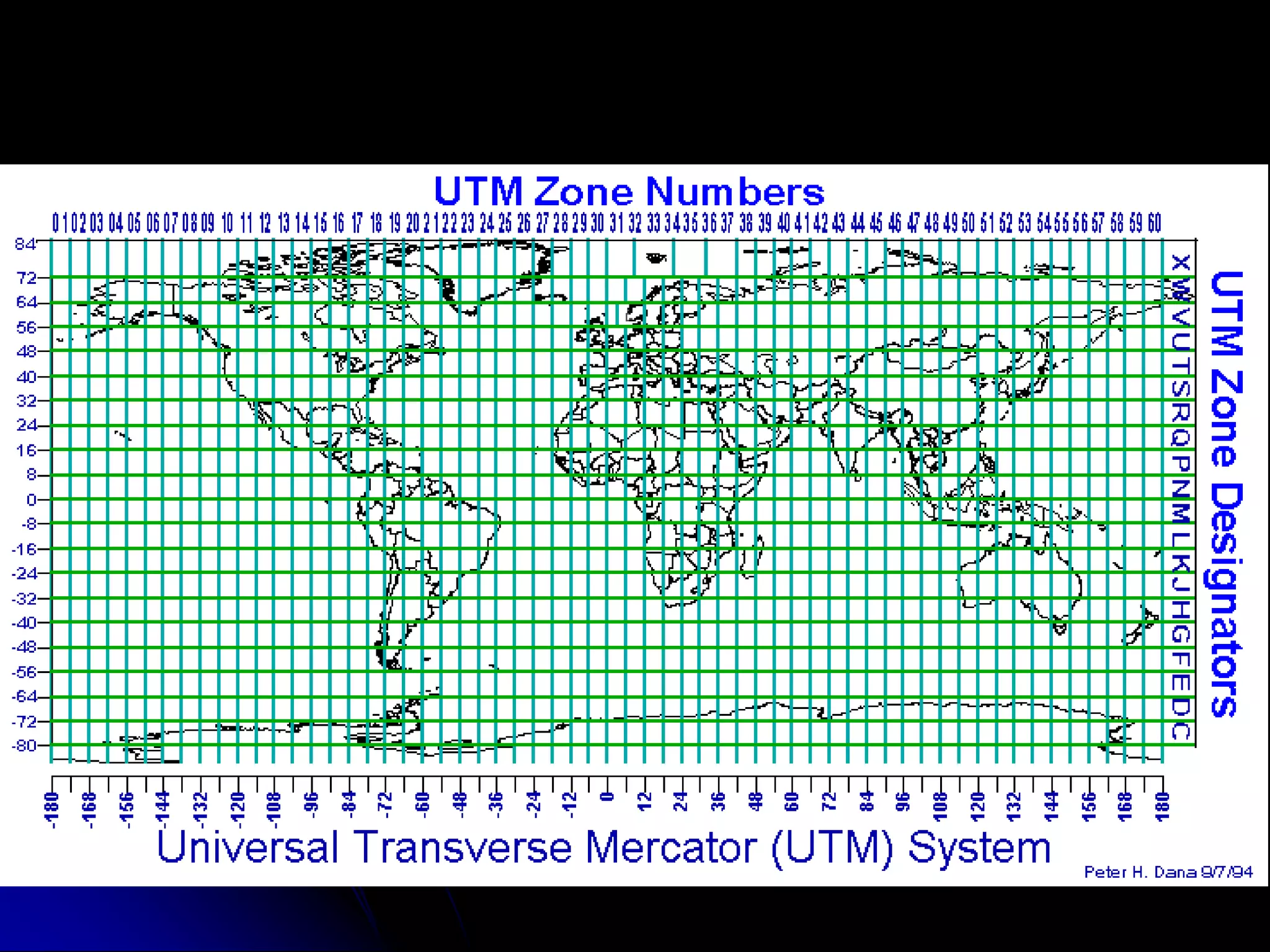
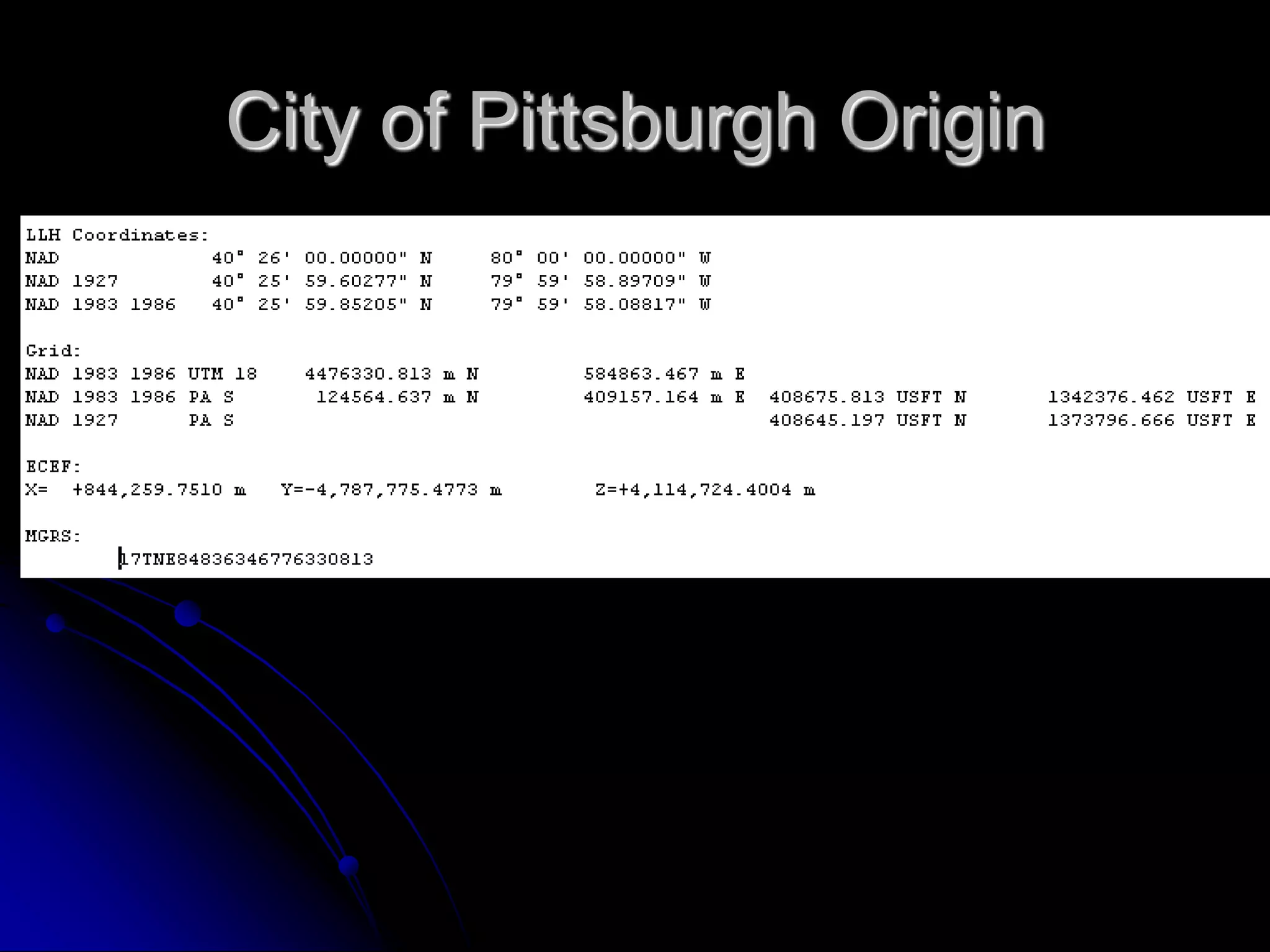
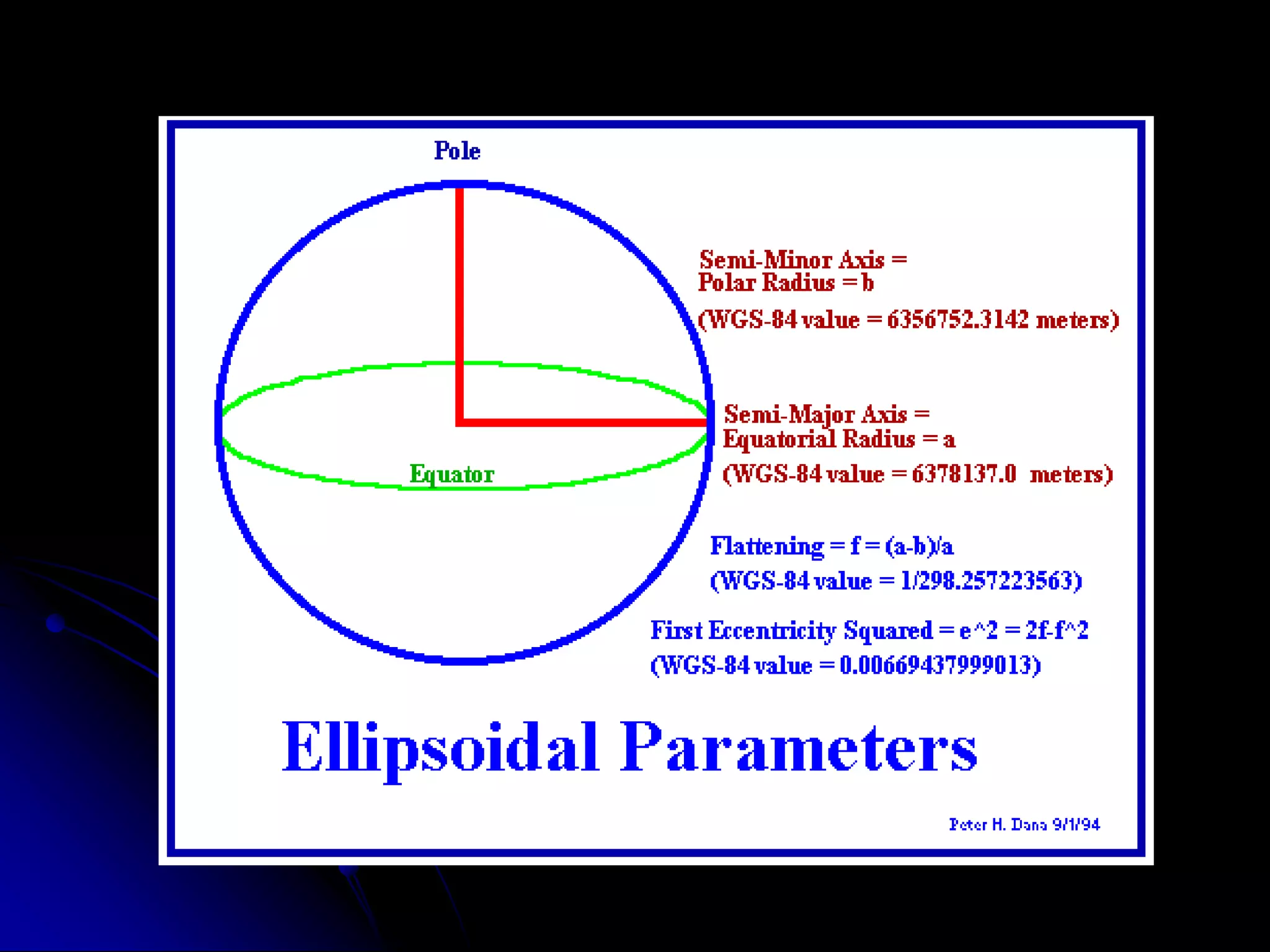
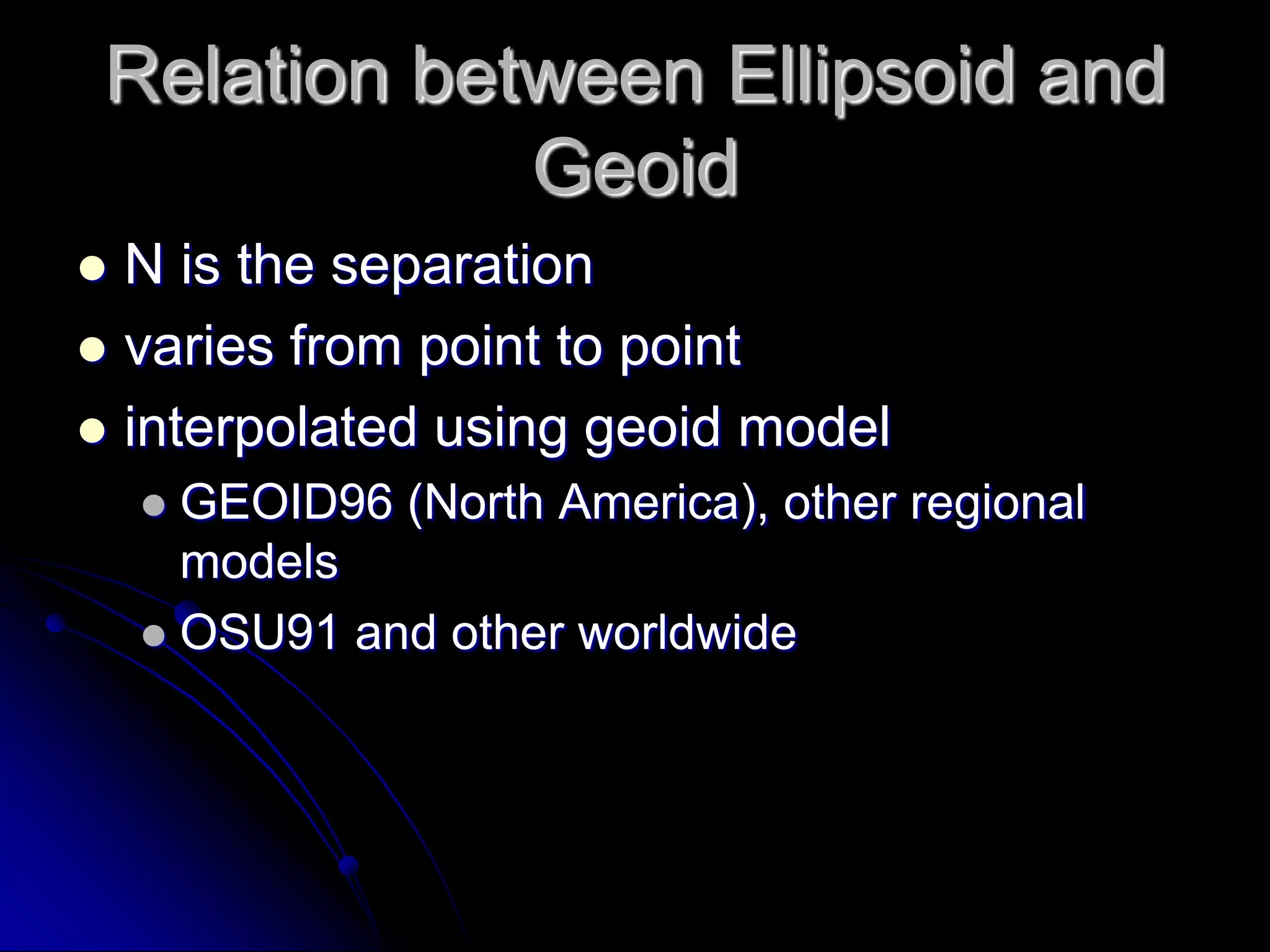
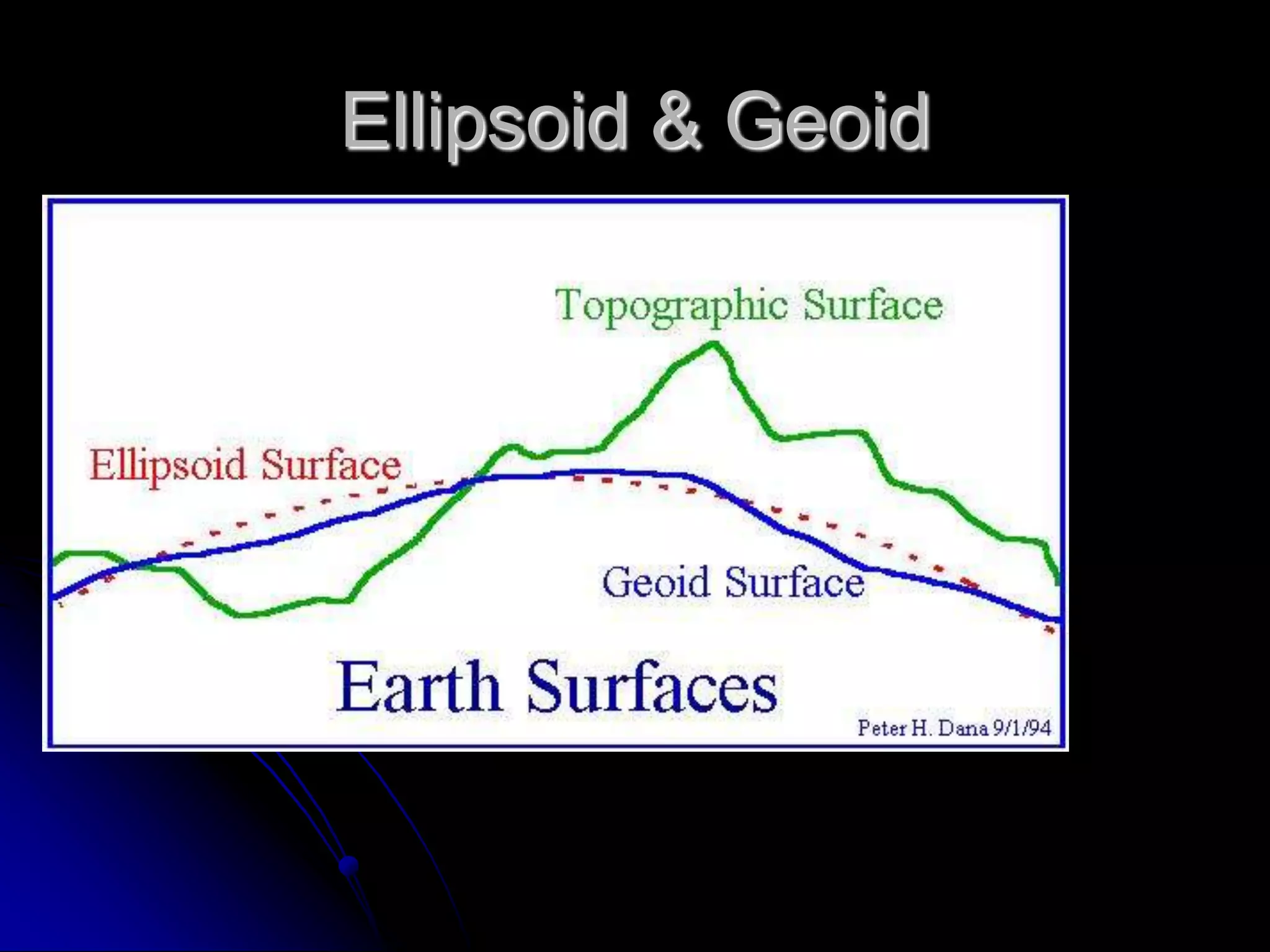
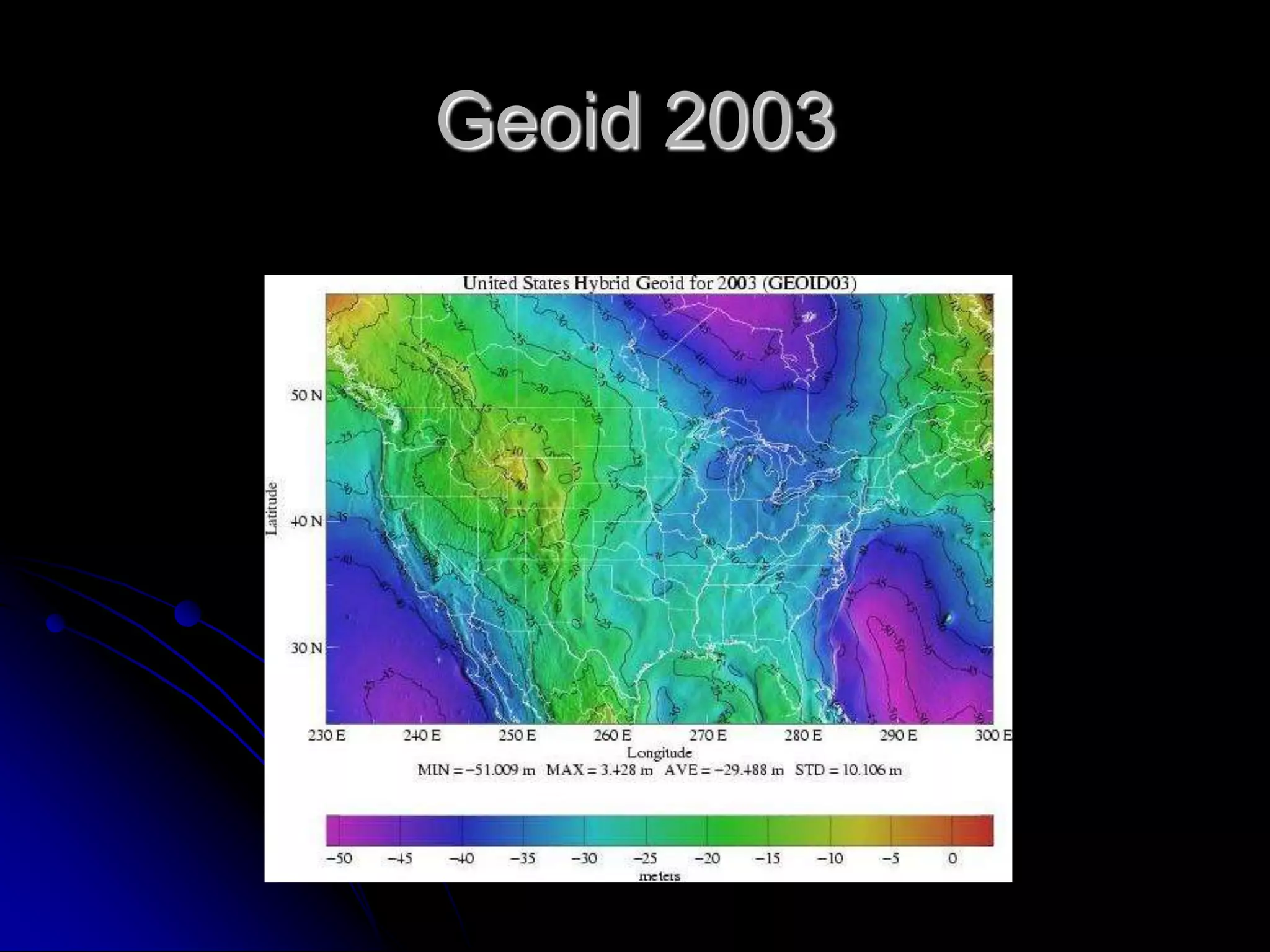
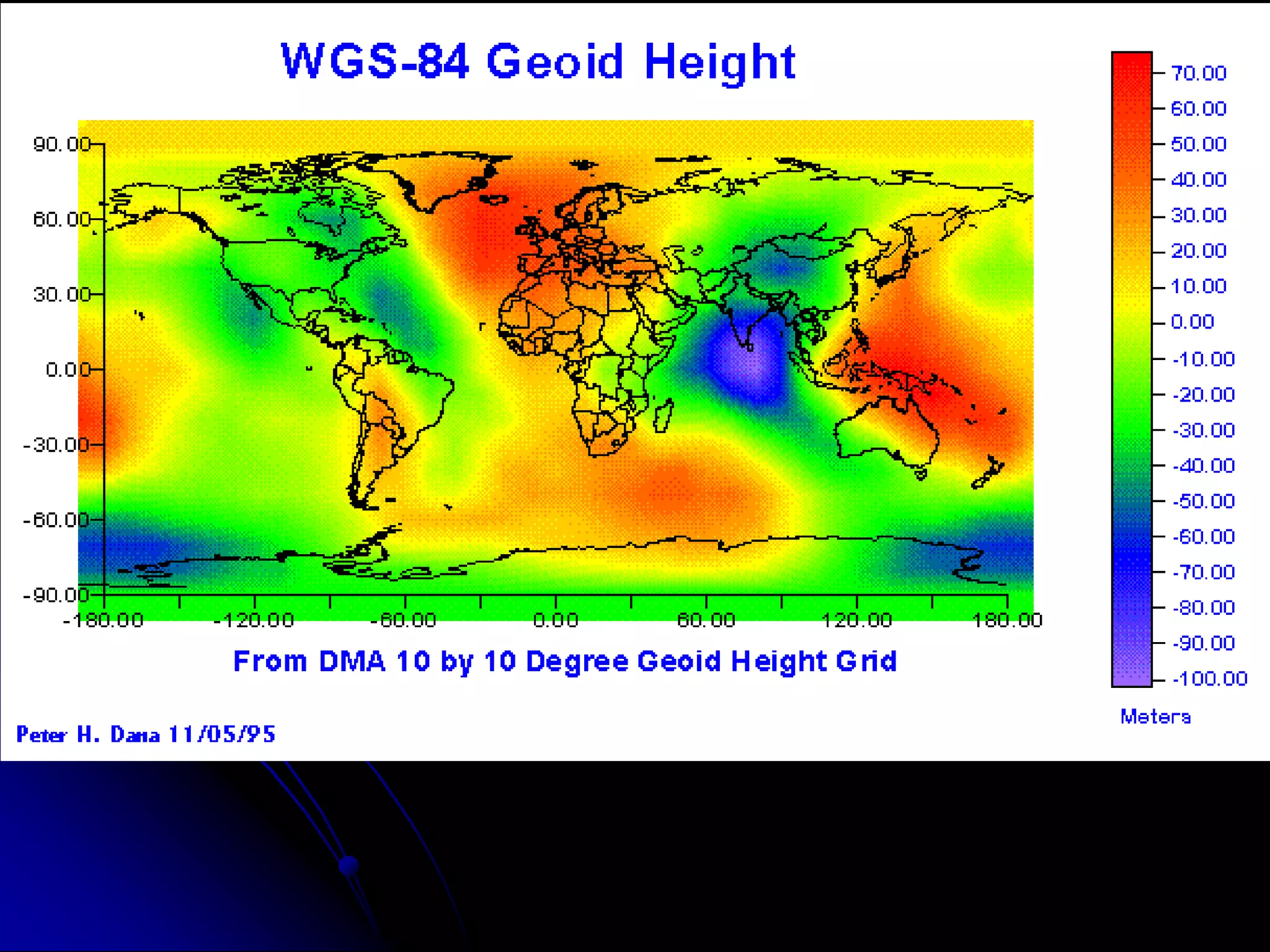
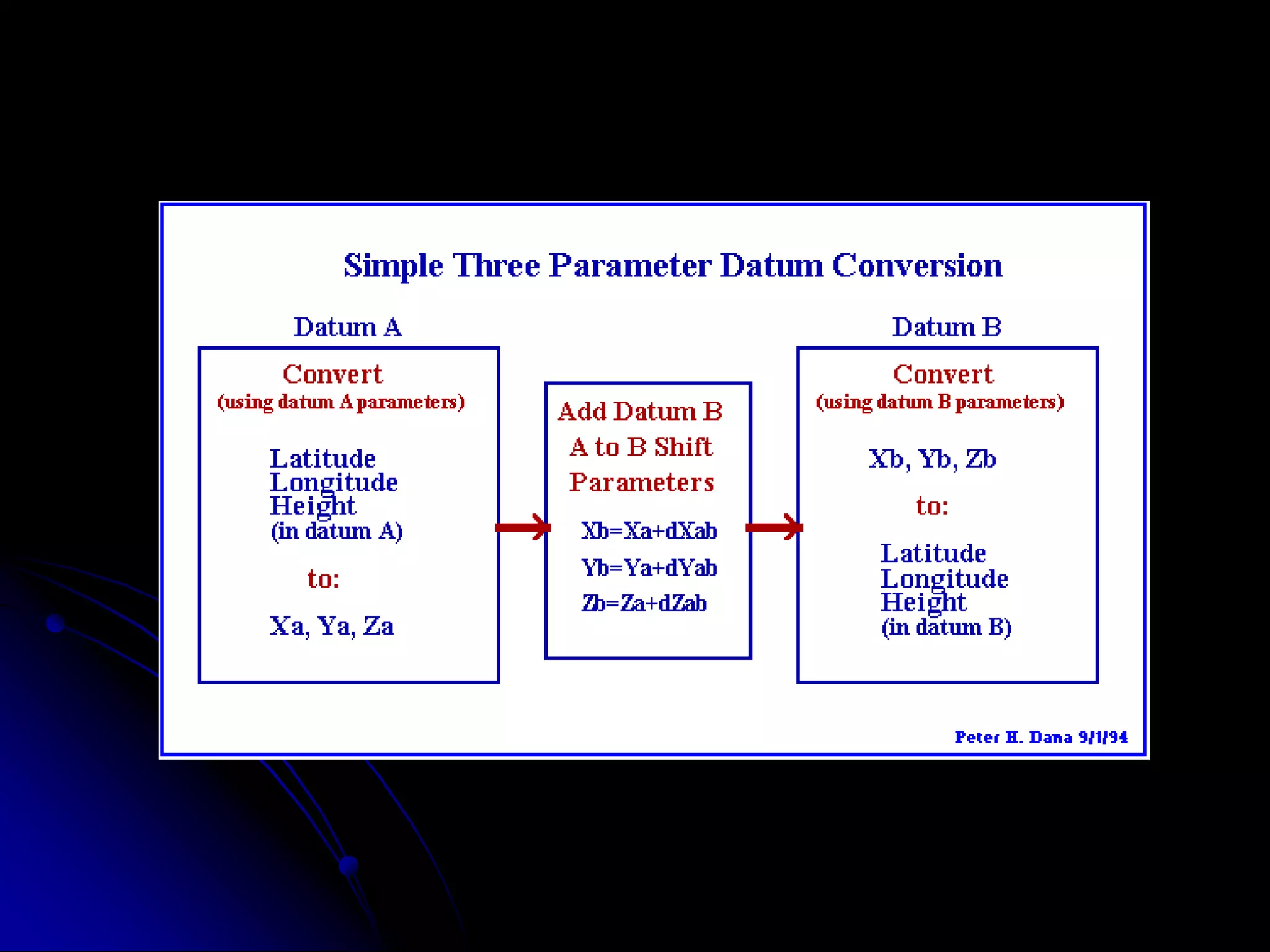
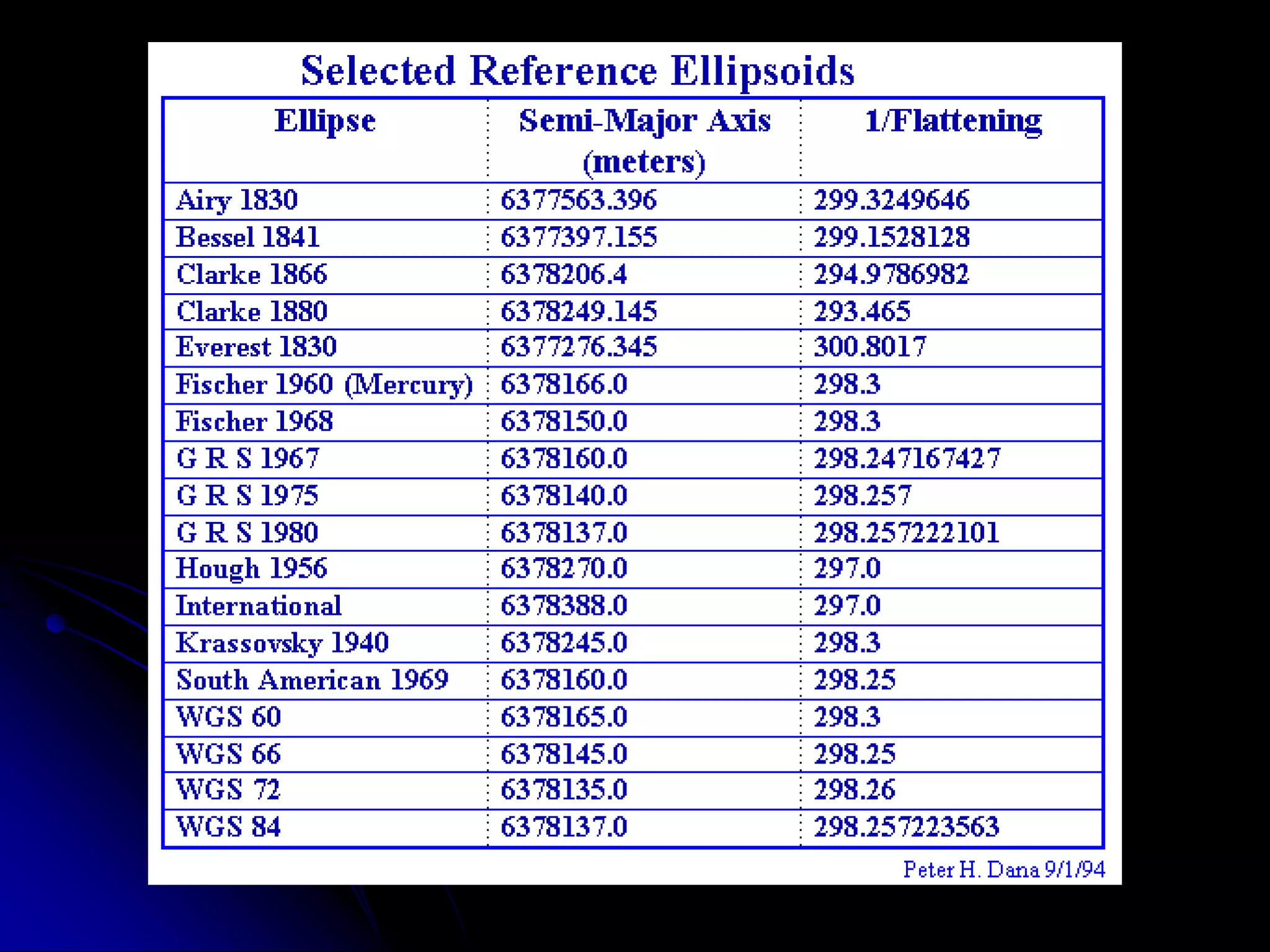
Definitions and types of datums, coordinate systems, and their importance in GPS and surveying.
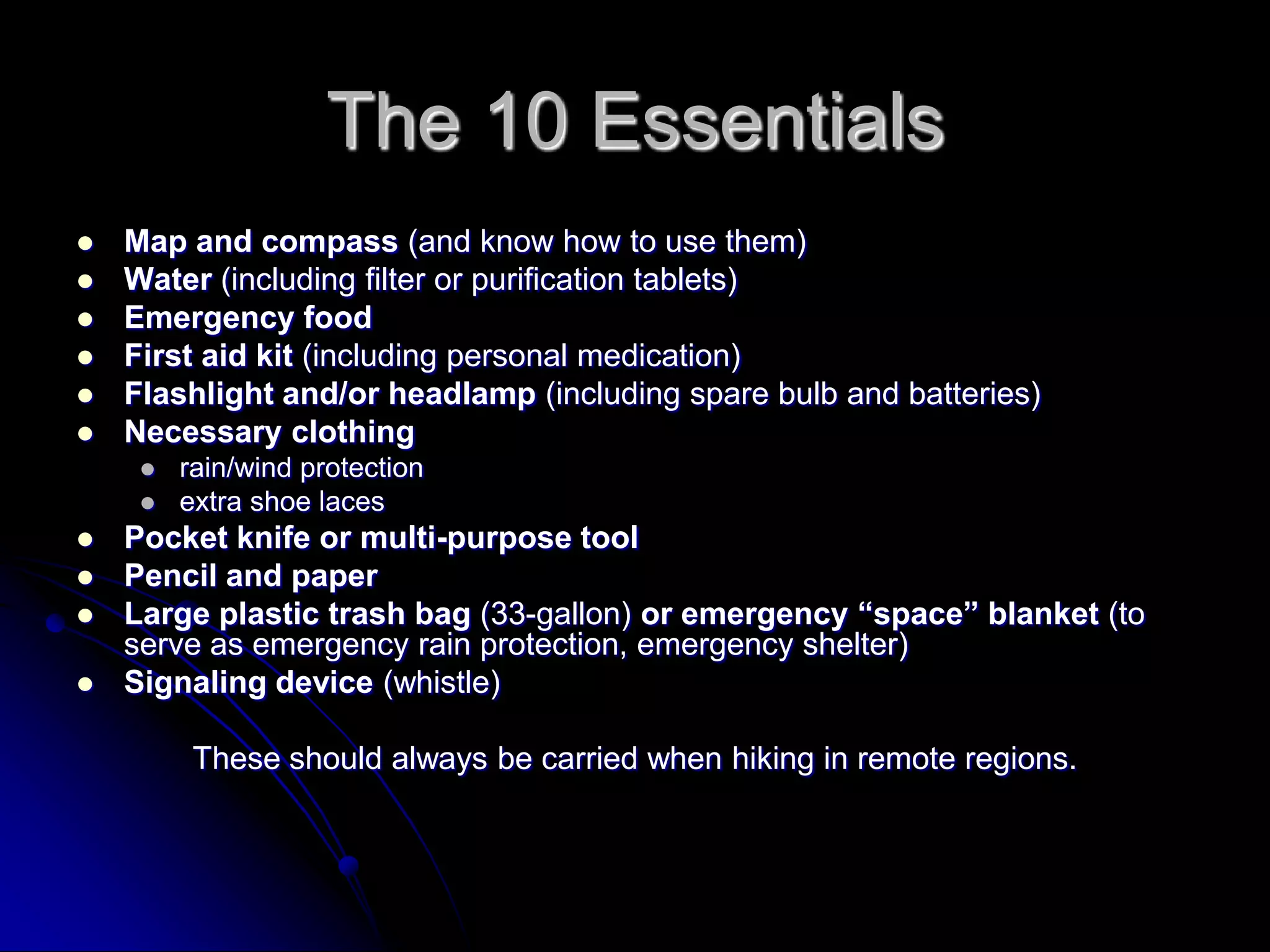
Emphasis on practical GPS use, navigation essentials for hiking, and the importance of traditional navigation tools.















































![[DevFest Strasbourg 2025] - NodeJs Can do that !!](https://cdn.slidesharecdn.com/ss_thumbnails/devfeststrasbourg2025-nodejscandothat-251127142731-da65b6fd-thumbnail.jpg?width=640&height=640&fit=bounds)







![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Artificial Intelligence] Building AI Systems That Users (and Comp...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-buildingaisystemsthatusersandcompanieslove-251124030845-038f7732-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Full-Stack Development] Agentic AI Architecture: Redefining Syste...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-agenticaiarchitectureredefiningsystemcommunication-251124030838-e6c70cc2-thumbnail.jpg?width=640&height=640&fit=bounds)







