Downloaded 288 times
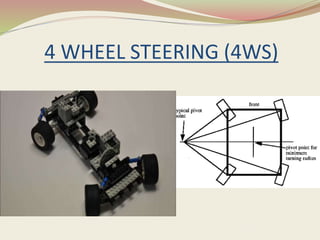
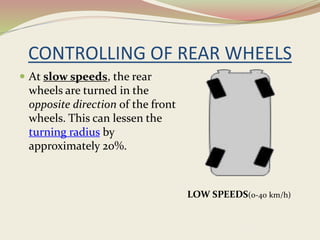
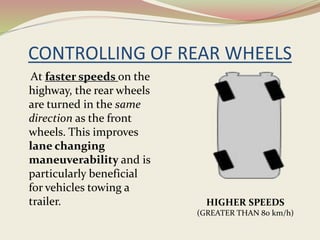
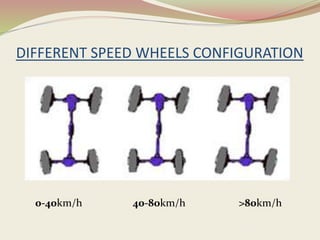
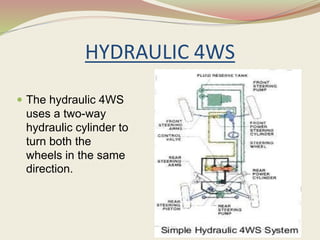
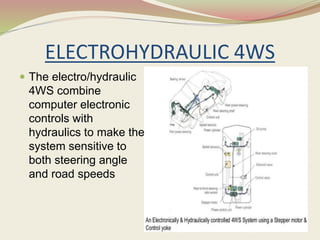
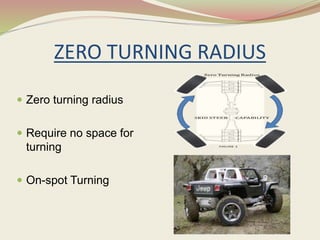



Four-wheel steering (4WS) allows rear wheels to turn for improved maneuverability, reducing the turning radius by 20% and enhancing stability at high speeds. Different types of 4WS include mechanical, hydraulic, and electro/hydraulic systems, each offering distinct advantages in various driving conditions. Modern vehicles utilizing active 4WS technology include models from Acura, BMW, and Toyota, providing greater steering efficiency and stability.























































































