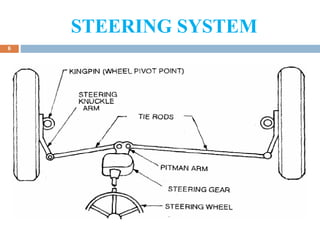
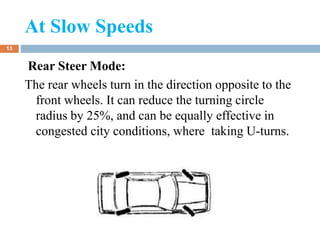
This document presents information on a 360 degree load carrier system with four wheel steering. It discusses the basic components and principles of steering systems, including types like front wheel, rear wheel, and four wheel steering. For four wheel steering systems, it describes the two main modes: rear steer mode for low speeds, where the rear wheels turn in the opposite direction of the front wheels to reduce the turning radius; and crab mode for high speeds, where all wheels turn in the same direction for stability. The document outlines benefits of four wheel steering like improved vehicle handling, reduced driver fatigue, and a smaller turning radius.