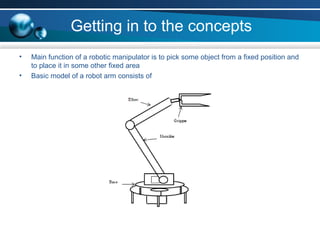
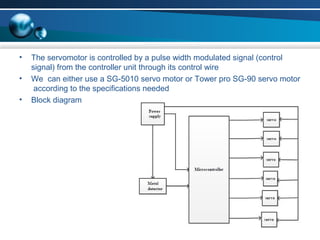
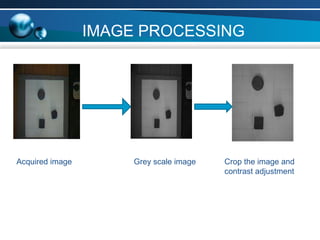
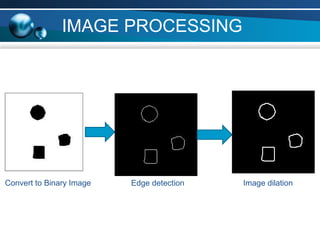
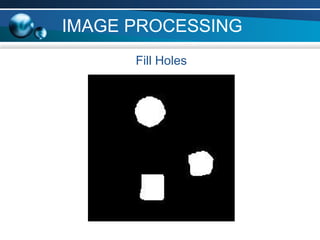
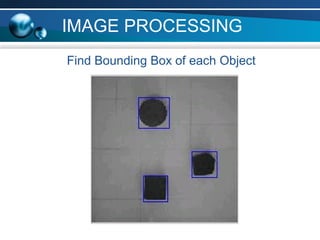
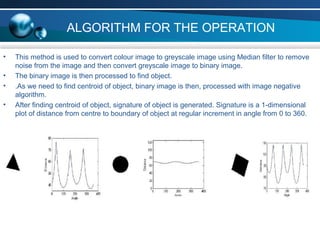
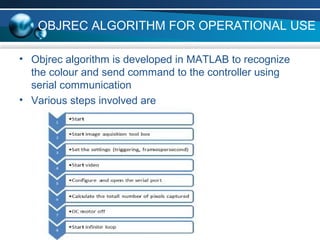
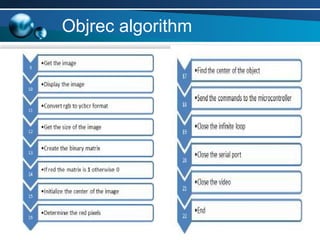
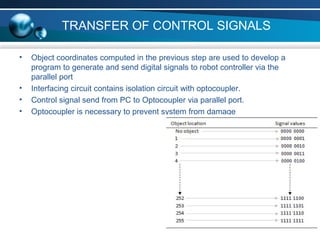
This document describes a vision assisted pick and place robotic arm guided by image processing concepts for object sorting. It discusses introducing a robotic arm that can pick objects from one location and place them in another using machine vision. The document covers key concepts like image acquisition, processing, object identification, and control signal transfer. It provides details on how a webcam captures images that are converted to grayscale and binary before edge detection and other processing to find object boundaries and centroids. Control signals are sent via an interface to guide the robotic arm based on image analysis. Potential applications and advantages like consistency and hazardous task handling are also summarized.