Downloaded 1,472 times

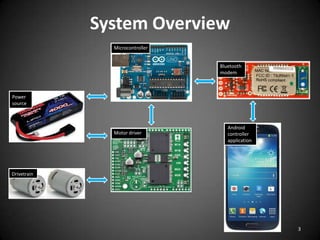




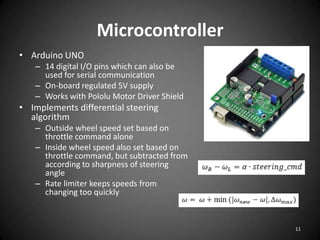
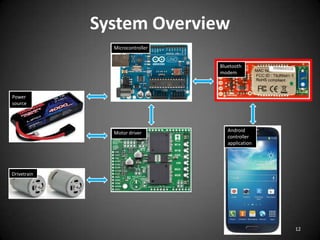
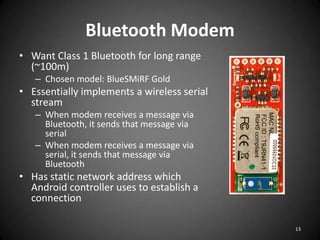

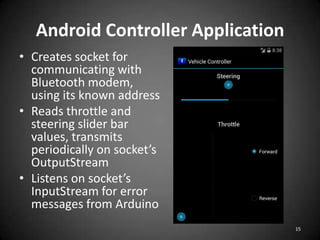

This document describes an Android-controlled robot project. An Android application allows a user to remotely control a robot vehicle via Bluetooth. The application sends throttle and steering commands to a microcontroller via a Bluetooth modem. The microcontroller controls DC motors through a motor driver to drive the robot. Sensors, advanced motion control, obstacle avoidance, and vision-based capabilities are proposed for future extensions. The project was a learning experience in mobile app development, electronics integration, and bringing a design from concept to implementation.