Downloaded 229 times

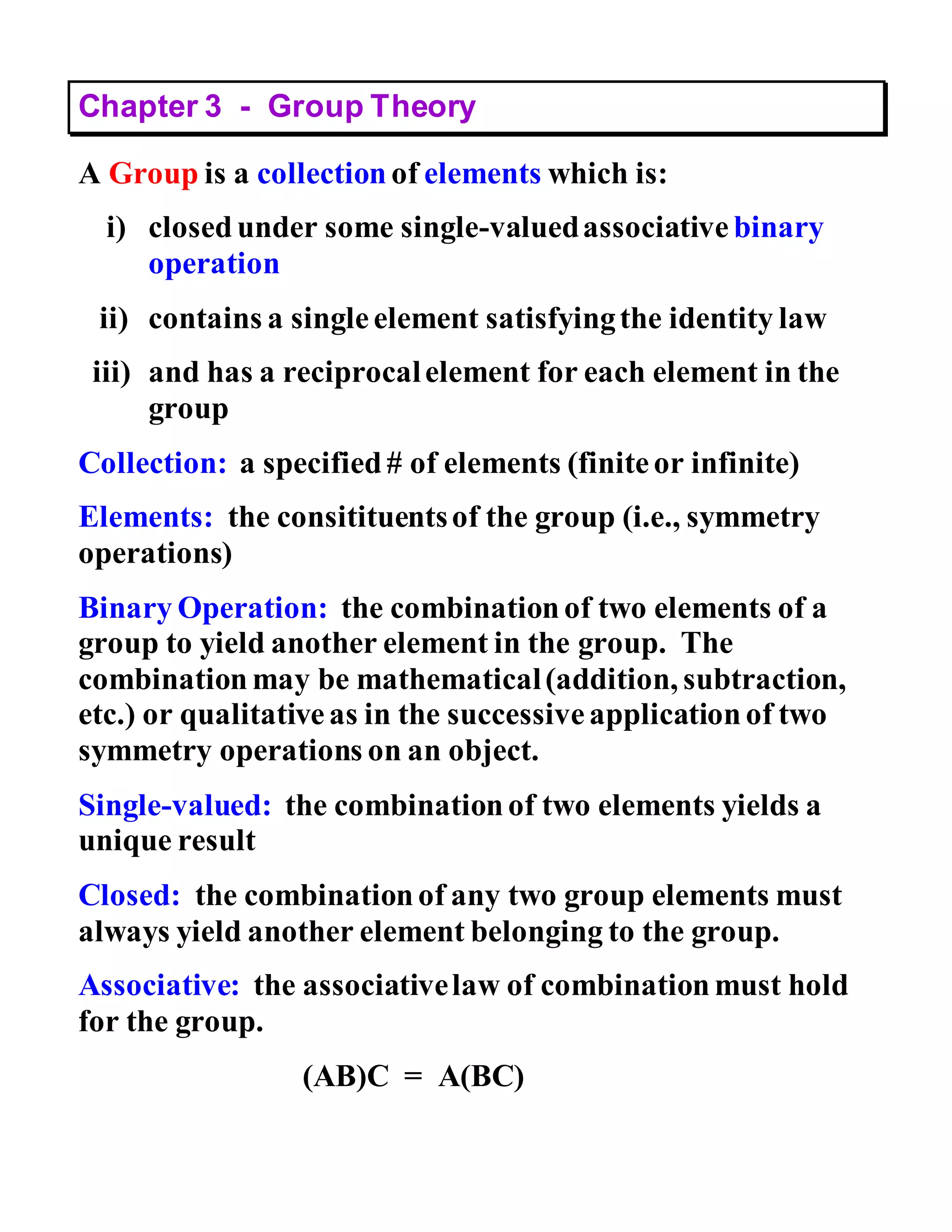







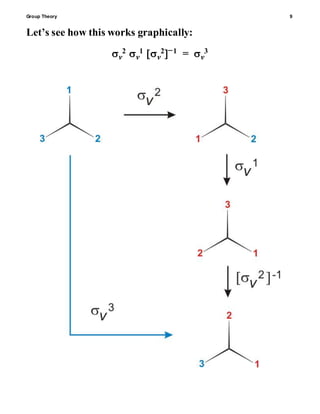

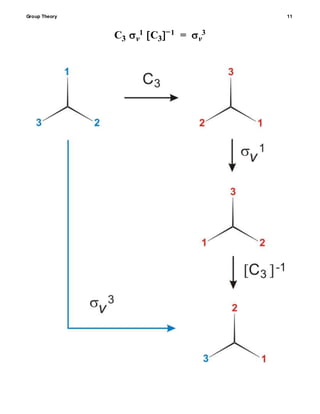



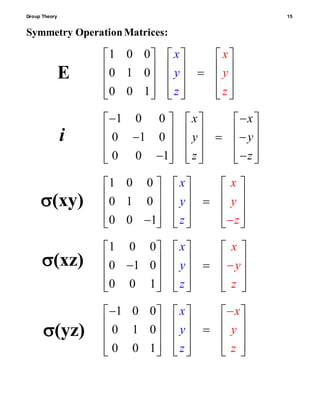
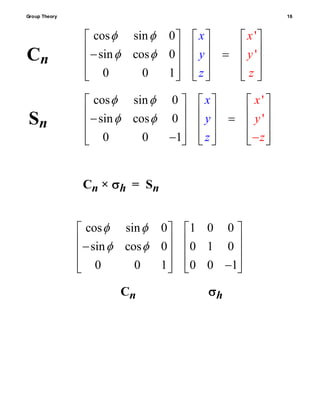











This document provides an overview of group theory concepts. A group is a collection of elements that is closed under a binary operation, contains an identity element, and has inverse elements. Groups can be represented by multiplication tables. Symmetry operations within a point group can be classified into conjugacy classes based on their similarity transforms. Matrix representations allow symmetry operations to be modeled as transformations on object coordinates.

















![Reactions in solution [ solution kinetics]](https://cdn.slidesharecdn.com/ss_thumbnails/reactionsinsolution-210226024359-thumbnail.jpg?width=640&height=640&fit=bounds)