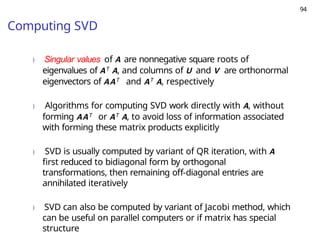
Here's a summary of the eigenvalue problem for a general audience:
What is an eigenvalue problem?
An eigenvalue problem is a mathematical problem that involves finding a special value (called an eigenvalue) an
Eigenvalue problems can be challenging to solve, especially for large matrices. Some of the challenges include finding the eigenvalues and eigenvectors, dealing with non-unique solutions, and handling ill-conditioned matrices.

![14
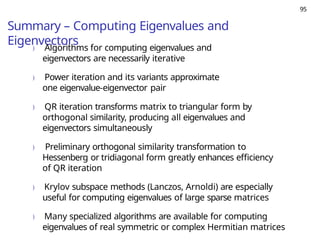
Eigenspaces and Invariant Subspaces
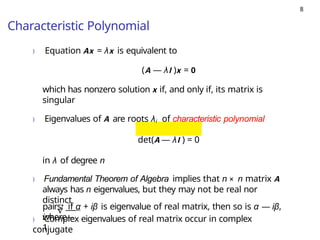
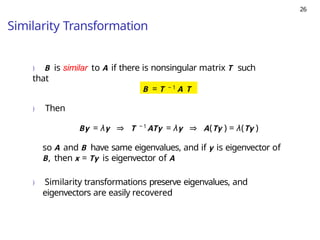
) Eigenvectors can be scaled arbitrarily: if Ax = λx ,
then A(γx ) = λ(γx ) for any scalar γ, so γx is also
eigenvector corresponding to λ
) Eigenvectors are usually normalized by requiring some
norm of eigenvector to be 1
) Eigenspace = Sλ = {x : Ax = λx }
) Subspace S of Rn (or Cn ) is invariant if AS ⊆ S
) For eigenvectors x1 · · · xp , span([x1 · · · xp ]) is invariant
subspace](https://image.slidesharecdn.com/eigenvaluepbm-numerical1-250413180702-1df32ec5/85/Eigenvalue-problems-numerical-methods-pptx-14-320.jpg)
























































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)








