Downloaded 60 times


![Basic Elements of DSP System
Fig. 1.3 [Proa]. Block diagram of a DSP System
02/03/13 15:00 8 A.H.](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-8-320.jpg)
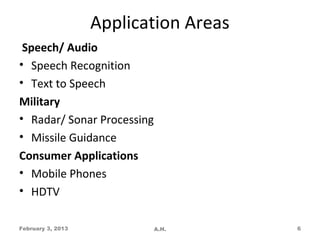
![Basic Parts of an A/D Converter [Proa P. 22]
Fig. Proa 1.14 (modified) Block diagram of A/D Converter
• Sampling: Convertd C-T signal into D-T signal by taking
“samples” of the C-T signal at D-T instants. At the point D we
obtain x(nTs)=x(n). Ts is called sampling interval
• Quantization: Converts C-V D-T signal into D-V D-T signal
(Digital signal xq at the point E). Diff between x(n) and xq(n) is
called quantization error [See more in Proakis 33].
02/03/13 15:00 10 A.H.](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-10-320.jpg)
![Coding and Sampling Theory
Coding: Converts xq(n) in to binary sequence
• Sampling Theorem:
If the frequency component in a signal is fmax ,
then the signal should be sampled at the rate
of at least 2fmax for the samples to describe the
signal completely. –
fs >= 2fmax
[See more in Proakis P.30]
11
02/03/13 15:00 A.H.](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-11-320.jpg)
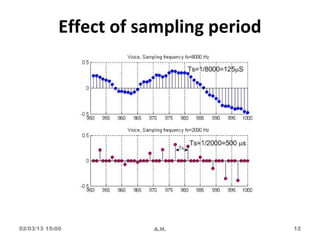
![Wave-2
Wave-1 Wave-3
Listen to original sound at Fs = 8000 Hz in Normal
Tempo [Wave-1]
Listen to the sound at reduced Fs = 2000 Hz in Normal
Tempo [Wave-2]
Listen to the sound at Fs = 2000 Hz in fast tempo
[Wave-3].
Listen to the sound at Fs = 8000 Hz in SLOW tempo
02/03/13 15:00 A.H. 13](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-13-320.jpg)
![Simple Manipulations of D-T Signals [52]
Types of manipulations-
• Transformation of independent variables (time
index).
- Shifting: Delay, Advance
• Modification of dependent variable (amplitude
values).
Addition
Multiplication
Amplitude scaling
February 3, 2013 A.H. 14](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-14-320.jpg)
![Shifting [P.52]
x(n) y(n)=x(n-k)
Shift by k
Shift Operation –
• Shifting of a signal x(n) is moving of the signal along n
index. In the shifting process, the independent
variable n is replaced by n-k.
• Shift equation: y(n) = x(n-k), k is an integer
• 2 types of shift operations -
– Right shift – k is positive [Delay]
– Left shift – k is negative [Advance]
February 3, 2013 A.H. 15](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-15-320.jpg)
![Shift Example [P. 53]
• [a] x(n) = [-1 0 1 2 3 4 4 4 4 4]
• [b] x(n-3) = [-1 0 1 2 3 4 4 4 4 4] [Delayed]
• [c] x(n+2) = [-1 0 1 2 3 4 4 4 4 4] [Advanced]
February 3, 2013 A.H. 16](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-16-320.jpg)
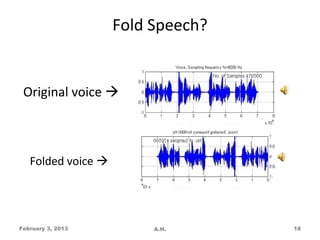
![Fold
In this operation each sample of x(n) flips
around n=0.
Folding equation: y(n) = x(-n)
Note:
• Operation of Folding AND Shifting of a signal are not
commutative
i.e., TD{ FD[ (x) ] } ≠ FD{ TD[ (x) ] }.
≠
(See Proa 53 for proof)
February 3, 2013 A.H. 17](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-17-320.jpg)
![Fold and Shift Example
• [a] x(n) = [2 2 2 0 1 2 3 4]
• [b] x(-n) = [ 4 3 2 1 0 2 2 2 ] [Folded]
• [c] x(-n+2) = [ 4 3 2 1 0 2 2 2 ] [Folded and right
Shifted]
February 3, 2013 A.H. 19](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-19-320.jpg)
![Convolution
• Definition:
Given 2 finite length sequences, x(n) and h(n),
their linear convolution is
y( n ) = x( n )* h( n )
∞
= ∑ x( k )h( n − k )
k = −∞
• Where the symbol [*] is used to denote
convolution
February 3, 2013 A.H. 21](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-21-320.jpg)
![The process of computing Convolution
To obtain y(n0) at some instant of time, n = n0
∞
y( n 0 ) = ∑ x( k )h( n 0 − k )
k = −∞
1. Fold h(k) about k=0 to obtain h(-k)
2. Shift h(-k) by n0 to the right to obtain h(n0–k)
3. Multiply x(k) by h(n0 –k) to obtain the product sequence
4. Sum all the elements of v to obtain y(n0)
To obtain y(n) [i.e., complete convolution output] -
Repeat steps 2-4 for all time shifts
February 3, 2013 A.H. 22](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-22-320.jpg)
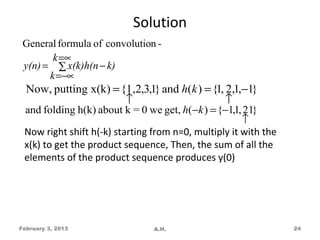
![Example of computing Convolution
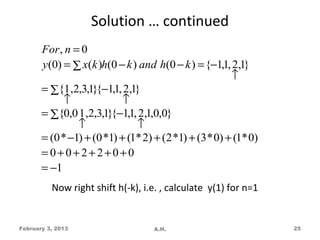
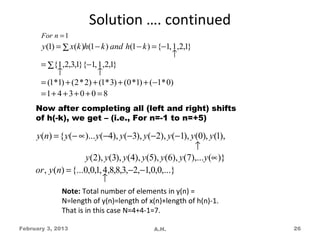
Problem Proa 2.3.2
Given, h(n)=[1,2,1,-1]; and x(n)=[1,2,3,1]
Compute the convolution output
y(n)=h(n)*x(n).
x(n) y(n)=x(n)*h(n)
h(n)
February 3, 2013 A.H. 23](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-23-320.jpg)
![Correlation [Proa 120]
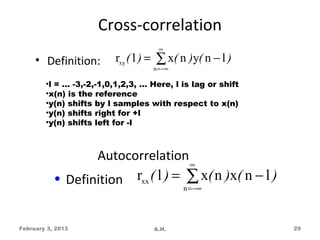
• Correlation is an operation that enables the
measurement of the degree to which 2
sequences are similar
• There are 2 types of correlations -
1. Crosscorrelation
2. Autocorrelation
February 3, 2013 A.H. 28](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-28-320.jpg)
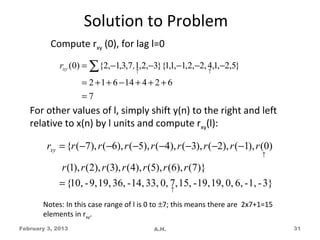
![Correlation example [Proa 120]
Example 2.6.1
Determine the cross-correlation sequence rxy (l) of
the sequences –
x(n) = {2,-1,3,7,1,2,-3}
y(n) = {1,1,-1,2,-2,4,1,-2,5}
February 3, 2013 A.H. 30](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-30-320.jpg)
![Similarities between computation of
Cross-correlation and convolution of 2
sequences
• Similarities are apparent
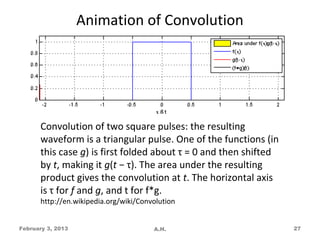
• Convolution computation- fold shift multiply one
sequence with the other to get the product sequence, and
then elements of the product sequence are summed to get
the conv. output.
• Cross-correlation computation – Same operations except the
folding one.
• rxy(l) = x(l) * y(-l) [See text]
February 3, 2013 A.H. 32](https://image.slidesharecdn.com/dsplecturevol-1introduction-130203090000-phpapp02/85/Dsp-lecture-vol-1-introduction-32-320.jpg)

This document provides an introduction to digital signal processing (DSP) through a lecture given by Prof. A.H.M. Asadul Huq. The lecture defines signals and discusses advantages and disadvantages of digital systems. It also outlines key DSP operations like convolution and correlation. Application areas are reviewed and basic elements of a DSP system are introduced. The document concludes by thanking attendees and providing a password to download the presentation.